
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
基于PICCOLO C2000 MCU的多通道航空超声波测距系统
C. Cambini,L. Giuseppi,M. Calzolai,P. Giannelli和L. Capineri
意大利佛罗伦萨大学信息工程系Via S. Marta 3,50139,意大利佛罗伦萨
电话: (39)055 4796373,传真: (39)0554796497,电子邮件:lorenzo.capineri@unifi.it
网站:http://www.uscndlab.dinfo.unifi.it
摘要:用于测距应用的机载超声波换能器不同特性的组合为机器人中的自主导航系统开辟了新的应用。Piccolo C2000 MCU 的功能适用于四通道测距系统的设计。每个通道具有不同的工作范围和精度,具体取决于传感器特性和实施的测距技术。本文介绍了在40kHz,100kHz和300kHz下工作的传感器的系统架构和实验结果。
1介绍
机载超声波测距系统在汽车和机器人行业有很多应用,通常需要快速的响应时间和高精度(例如执行器控制目的)。 然而,这些系统的性能通常受到传感器本身的限制,因为它们的特性是严重的折衷后的结果[1]。 信号处理结构和机载超声波前端技术的最新状况可以在最近发表的两篇文章中找到[2],[3],其中使用了CMUT器件,而飞行时间(TOF)估计技术的性能在文献[ 4]中得以介绍过。 我们的系统采用不同种类的机载超声波换能器进行设计,这些换能器可以覆盖短距离,中距离和长距离以及不同的视角,精度与现有技术相匹配,同时最大限度地减少换能器的数量。
由于C2000微控制器和自定义模拟前端的优化,所提供系统的功耗有限。 基于FPGA的方法能够实现更复杂的信号处理策略,但更昂贵并需要更大的电路板[4],[5]。
最后,所提出的系统可以并行运行多达四个换能器,可以选择具有不同频率和带宽的信号,以便实现更复杂的算法来进行物体检测和定位[6]。不同的换能器技术和信号处理算法的结合导致实现了一个强大的测距系统,能够测量长距离的距离并在不同目标反射率(形状,声阻抗,尺寸)下仍具有优秀性能。
作者提出了针对其他不同应用[7],[8]的用于开发单通道换能器前端的微控制器。在这项工作中,商用微控制器提供的资源已被用于设计一个多功能多传感器系统。 我们的系统是使用配备Piccolo TMS320F28069 MCU和定制传感器模拟前端的TI C2000实验套件开发的。
对于超声机载系统的设计和实施对于定义以下步骤是重要的:
-传感器选择
-电子前端设计
-微控制器选择
-固件实施
最后介绍了三种不同传感器在40kHz,100kHz和300kHz下工作的测距结果,并在结论中讨论了实验结果。
2 系统构架
所提出的系统使用三种不同的传感器:两个来自Murata的商用压电陶瓷(MA40S5和MA300Dl)和一个定制的半圆柱形PVDF传感器,工作频率为100kHz [7]。 表1列出了每个传感器型号的相关特性。
如图1所示,硬件架构包括四个独立的超声波前端,每个前端由三部分组成:
bull; TX PULSER是Diodes公司的ZXMHC1OA07N8集成H桥。 工作在24V。 驱动信号由MCU的PWM外设产生。 当使用单端传感器时,该电路也可以作为半桥工作。
bull; RX放大器是一款基于TI的高增益,低噪声仪表放大器OPA4228四运算放大器。 每个通道的频率响应都是专门针对其传感器量身定做的,详见表2。
bull; 将发射器和接收器级分离的DUPLEXER电路包括一个经过调谐的LC匹配网络,以优化每个换能器的输入阻抗。
图1-系统的硬件模块方案 电源来源于USB
其他信号调理阶段被包括在内,用于将接收器级连接到ADC以及集成在MCU内的比较器。将两个开关DCIDC转换器添加到Experimenter Kit原型区域,以生成模拟电路所需的电源轨(-5 V用于放大器,24 V用于H桥)。 整个系统通过USB总线供电,并在正常运行时耗电约330mA。 电子系统的实现原型如图2所示。
表1-机载超声波换能器。
|
模型 |
中心频率 |
范围 |
|
MA40S5 |
40kHz |
25cm-85cm |
|
PVDF |
100kHz |
6cm-25cm |
|
MA300Dl |
300kHz |
3,5cm-6.5cm |
表2-接收机放大器参数。
|
传感器 |
获得 |
带宽(0-3dB) |
|
MA40S5 |
50分贝 |
22kHz-156kHz |
|
PVDF |
60分贝 |
21kHz-125kHz |
|
MA300Dl |
33分贝 |
130kHz-970kHz |
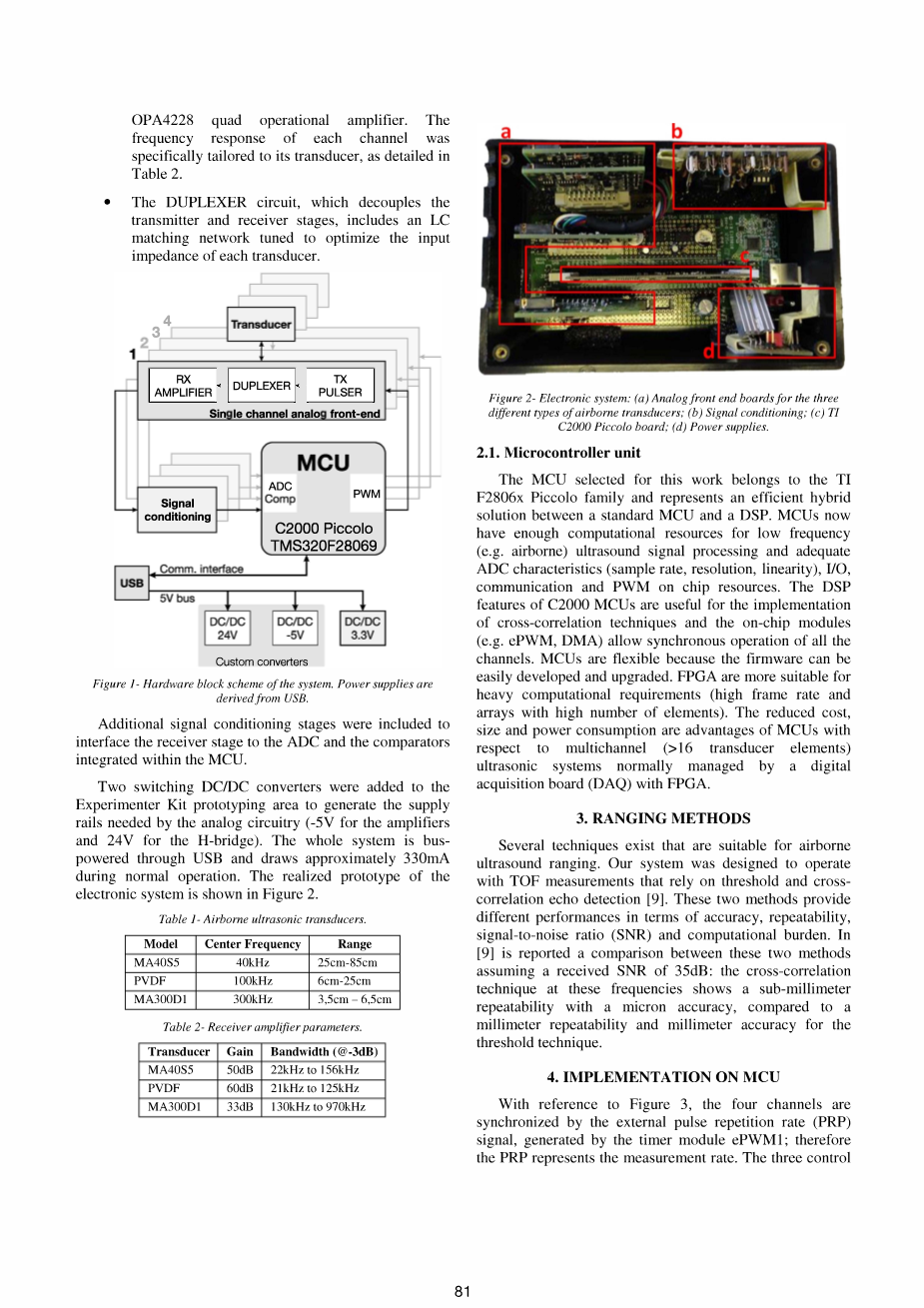
图2-电子系统:(a)三种不同类型机载传感器的模拟前端板;(b)信号调节;(c)T1 C2000短笛板;(d)电源
2.1 微控制器单元
为此工作选择的MCU属于TI F2806x Piccolo系列,代表了标准MCU与DSP之间高效的混合解决方案。 MCU现在有足够的计算资源用于低频率(如机载)超声信号处理和足够的ADC特性(采样率,分辨率,线性度),I / O,通信和片上资源的PWM。 C2000 MCU的DSP功能对于实现互相关技术非常有用,片上模块(例如ePWM,DMA)可以实现所有通道的同步操作。MCU很灵活,因为固件可以很容易地开发和升级。FPGA更适合于繁重的计算要求(高帧速率和元素数量高的阵列)。降低的成本,尺寸和功耗是MCU的优势至多通道(gt;16传感器元件)通常由数字采集板(DAQ)与FPGA进行管理的超声波系统。
3、测距方法
有几种技术适用于空中超声波测距。 我们的系统设计用于依赖于阈值和互相关回波检测的TOF测量[9]。 这两种方法在准确性,可重复性,信噪比(SNR)和计算负担方面提供不同的性能。 在文献[9]报道了这两种方法之间的比较,假设接收信噪比为35dB:与阈值技术的毫米重复性和毫米级精度相比,这些频率处的互相关技术显示出具有微米精度的亚毫米重复性。
4、MCU的实施
参考图3,四个通道由定时器模块ePWM1产生的外部脉冲重复率(PRP)信号同步; 因此PRP代表测量速率。 三控驱动相应TX PULSER所需的模拟前端信号由三个PWM模块生成,并由ePWM1进行同步。 后者也为每个接收通道生成消隐信号。 消隐信号的开始时间和持续时间取决于隐藏来自传感器附近目标的接收到的回波信号的传感器振铃响应。 然后,对于每种类型的换能器来说,都需要对足够的消隐信号进行编程。ePWM1模块的中断例程管理前两个任务。 我们可以在图3中观察到只有三个传感器用于传输,因为第四个(MA40S5)通道仅在接收模式下工作,因为它用于使用另一个脉冲回波模式的40kHz传感器进行位置估算。
4.1.阈值技术的实现
四个通道中的三个实现了阈值测距技术,该技术包括当信号达到集成DAC编程的阈值时产生中断至CPU。 中断由连接到模拟前端包络检测器输出端的三个比较器产生。 阈值水平被选为背景噪声的3到5倍[9]。
中断信号被传送到XINTI,XINT2和eCAP1模块,分别对应于两个Murata MA40S5传感器通道和100kHz PVDF传感器的通道。 在接收到中断时,相应的程序会读取ePWM1生成的时间,并在室温下将其转换为声速 cair = 340 m/s给定值的范围值。
4.2互相关技术的实现
互相关函数e(t)的计算已经使用MCU的可用FFT有效实施:
(1)
特别是使用的库函数是[10]:CFFL32(),ICFFL32(),CFFLF32_sincostable(),
maxidx_SP_RV_2()和mpy_SP_CVxCVC()。
通过接收到的信号和加载在存储器中的参考信号计算互相关(参见图3)。 通过启用ADC和DMA模块,获取互相关通道与PRP信号同步。 后者,当采样传输完成时,用互相关方法启动范围计算(参见图3中的函数Range()。)
使用全数字化回波信号的最后512个采样(往返时间)计算FFT,相当于采样频率为3MHz时的3cm范围。 根据先前的考虑,在图4中我们可以观察到,当对应于饱和和阻尼的初始信号部分终止时,获取最后的512个采样; 这个时候门控和使用了片上ADC的更高采样频率保证了TOF估计在精度和偏移方面的最佳性能。
范围函数的整个持续时间为1.9ms,其中687us用于计算FFT和IFFT以及执行其他辅助代码所需的剩余时间。 算法处理时间已经过测量,并与TI提供的基准功能进行了比较。 我们观察到实现的输出速率对于一些自主导航系统是足够的(例如,轮椅)。
图3-系统时序图(顶部)和微控制器上实现代码的框图(底部)。
在计算互相关函数时,开始搜索最大值,并使用相应的时间根据以下公式计算范围d:
(2)
其中pkindex是互相关函数输出的最大值的向量索引,其对应于互相关使用的两个回波之间的延迟。Toff是样本中的偏移量,参考信号相对于t = 0,T是采样时间。A描述的这些参数计算在实验信号上显示在图4中。
4.3.目标定位和多回波测距程序
在我们的系统中,通过使用两个40kHz MA40S5换能器的阈值测距技术和100kHz PVDF的多回波检测,实现了第一个检测目标的位置估计。
图4-采样信号(顶部),存储在存储器中用于互相关计算的参考信号(中),以及互相关结果(底部)
为此目的开发了两个函数multiecho()和position(),见图3; 它们在中断程序中的有效标志开关上运行,允许它们在主程序中执行。 多回波检测功能最好与具有大光束模式的超声波换能器一起使用,例如半圆柱形PVDF [11]。eCAP模块适用于此过程,因为它可以记录前四个检测信号。
由于许多环境因素(噪声,散射,气流)影响传输的超声波信号,这会导致虚假触发(假阳性目标)。 为了解决这个问题(也称为“比较器抖动”),引入了迟滞,以避免检测到比可编程距离更近的目标 (例如5cm)。
Position()功能已经实现,用于估计安装在固定和已知距离处的两个传感器的水平面上的目标位置。
5、结果
在本节中,我们将报告四个通道的测距方法在准确性和可重复性方面的实验特性。 对于使用阈值测距技术编程的通道,平面塑料目标已放置在不同的距离处。 根据表1中报告的有用范围,在光学工作台上1rsquo;rsquo;的步骤中已经研究了两个范围:40kHz传感器从30cm到70cm,100kHz传感器从8cm到25cm;对于互相关通道已经使用1mm的更精细的步骤,通过从3cm到5cm的高精度光学滑块移动目标。
在图5中报告了3个换能器的测量范围与参考范围。 通过一组500次采集评估误差(见表3中的数值)。 精度已被估计为最大误差和作为标准偏差最大值的可重复性。 得到的结果与[4]中报道的数据一致。
在图5中还显示了实时测距系统的性能,该系统组合了三个不同的换能器(范围3cm-85cm),其中我们可以观察到良好的线性(在全范围内优于3%)。
表3-测距技术的估计精度和可重复性
|
传感器(频率) |
范围[cm] |
准确性[cm] |
重复性(中心[cm] |
|
MA40S5(40kHz) |
30-70 |
0,6 |
0,3 |
|
PVDF(100kHz) |
7-25 |
0,4 |
0,2 |
|
MA300Dl(300kHz) |
4-5 剩余内容已隐藏,支付完成后下载完整资料
资料编号:[22101],资料为PDF文档或Word文档,PDF文档可免费转换为Word |

