
英语原文共 23 页,剩余内容已隐藏,支付完成后下载完整资料
摘 要
本文对爱荷华船舶CFD实验模型、数值计算和高性能计算(HPC)作了一个概述。其中包括现在的V4.5版和V5.5版,以及下一版本V6版。船舶工程方面的案例主要突出能力和需求。高保真版本V6版模拟了海洋工程和基础物理学的相关条件,增加了流体物理学的相关分析结果。本文还对作为发展随机优化第一步的不确定量化研究作了综述。
关键词:CFD;船舶工程;海洋工程
引 言
Stern等人最近的研究表明,CFD技术在以更快、有更突出的成就的方式进步。几乎没有CFD应用缓慢的行业,因为大多数CFD用户都是在校或和研发实验室的研究人员。然而,虽然改变缓慢但可以确信的是,CFD正在逐渐转变着工程设计的方式。由原本的先构建再测试的螺旋设计方法转变为基于模拟的设计方法(SBD),后者显示了一种安全、有效、经济的革新的21世纪一站式设计概念。第一代SBD相对于高保真性更侧重于功能性,其下一代超大规模的计算能力需要关键性的进步才能实现。二代SBD的计算功能包括完全求解、完全耦合、快速读入、多尺度、多相、包含流体结构的相互作用和多达数十亿网格点的多学科问题的求解。
此处专门基于爱荷华CFD船舶URANS/DES工具箱目前的发展状况对CFD在船舶与海洋工程的最新进展进行了综述。重点是Stern等人最新的研究进展。若想了解爱荷华CFD船舶URANS/DES工具箱在计算船舶流体力学领域的最新进展和应用情况,读者可自行参阅Stern等人的相关文献。此外,本文还描述了爱荷华科学技术研究上有关SBD发展的范例。概述了爱荷华CFD船舶建模、数值计算和HPC方面的进展,包括现在的V4.5版和V5.5版,以及下一版本V6版。船舶工程方面的案例主要突出能力和需求。高保真版本V6版模拟了海洋工程和基础物理学的相关条件,增加了流体物理学的相关分析结果。本文还对作为发展随机优化第一步的不确定量化研究作了综述。自坎帕纳之后的确定性和随机优化研究的相关研究没有乃入本文的讨论范围。
船舶流体力学SBD发展范例
仿真技术的快速进步正在革命化工程实践, SBD和最终虚拟现实正在取代当前依赖实验观测和分析的研究方式。可以预见从科学研究到形成真理这一过程的研究方式的转变。由原本依赖于观测、基于实验的研究方法,转变为依赖逻辑、基于模拟的研究方法。SBD 的涵盖范围包括了从电算化系统的基础方法到基于物理学初边值问题 (IBVP) 的解这一广阔领域。目前的研究重点在于基于IBVP的船舶流体力学问题的解。船舶流体力学SBD合并了传统的阻力和推进、耐波性、操纵性、开放海洋和沿海环境影响领域,为未来船舶迎接21世纪挑战提供了新的机会。发展SBD涉及到水动力新范式的研究,在这些研究中,CFD、实验流体力学(EFD) 和不确定性分析(UA)都使用基准几何形状和综合优化方法,作为保证模拟逼真度的内在动力。与其他研究机构和组织的国际合作包括有参加国际热带木材理事会、北约AVT工作组和海军工程教育财团(NEEC),举办国际CFD讲习班和当前的NICOP项目。这些活动增强了各单体研究所的能力,使他们互利双赢,这是计算船舶流体力学取得空前成就的基础。
爱荷华船舶CFD URANS/DES/LES SBD工具箱
爱荷华船舶CFD软件是在爱荷华大学的IIHR水动力工程实验室开发的通用CFD仿真软件,不仅是作为学生论文和项目研究的支持,还面向海军实验室、工业和其他大学作交流。爱荷华船舶CFD软件经过20多年的验证,在船舶流体力学的CFD程序上一直处于领先地位。当前版本包括爱荷华船舶CFD V4.5版、V6.1版和V6.2版,V5.5版与V6.3 版正在开发之中。
2.1 V4.5、5.5版建模,数值计算方法,HPC
爱荷华船舶CFD软件V4.5版是一个不可压缩流体船舶流体力学URANS/DES 求解器。其位移方程既不是在绝对的也不是在相对的惯性非正交曲线坐标系中求解,而是在但非变形控制系统中求解。湍流模型包括基于各向同性的混合的 k / k-omega;模型和基于各向异性的RANS和建立在近壁模型或壁面函数DES方法上的代数应力模型 (ASM)。单相水平集方法用于自由表面捕获。单相水平集方法用于自由表面的捕获。对于带有父/子层次结构的多对象,约束、半约束和完全六自由度等能力是可用的。完全离散的螺旋桨或体积力螺旋桨模型可以用于推进。水射流推进包括使用带有详细管流仿真的实际的水射流推进和带有反应力和力矩的模拟水射流推进。不可压缩性由强压力/速度耦合实现,后者则由PISO 或投影算法实现。流体流动方程在地球固定的惯性参考系中求解,而刚体方程在船舶参考系中求解。其他建模功能包括半耦合的两相气水建模、环境波和风、泡状流和流体-结构相互作用。
数值方法包括在上贴体曲线坐标网格中的有限差分离散法,该数值方法带有高阶迎风格式的对流项和二阶中心粘性项。时间项采用的是二阶向后差分欧拉法离散。由于求解器是为高雷诺数流设计的,运动和重新初始化方程是弱椭圆性,因而使用交替方向隐式(ADI)法在五对角线求解器中求解。在基于MPI的域分解的方法中每个分解图像的块都映射到一个处理器。由此产生的代数方程使用块雅可比的不完全分解(ILU)预调节器和双共轭梯度稳定的块(BCGSL)的PETSc工具包求解。所有的运动方程都以连续的方式解决和迭代,以实现在每个时间步内的收敛。
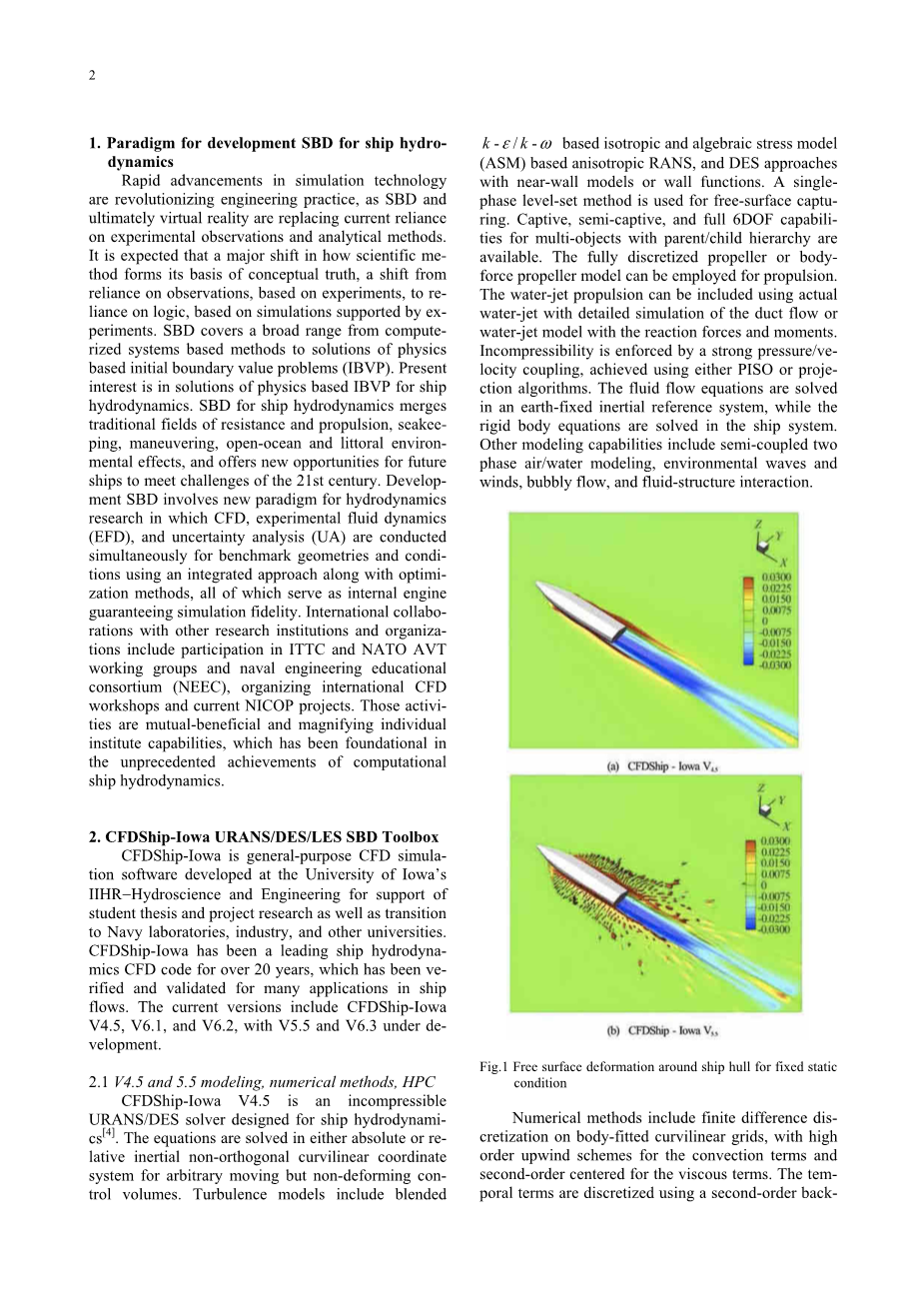
将爱荷华船舶CFD软件从V4.5版升级到V5.5版的工作正在进行中,后者带有基于流体体积(VOF)方法的完全耦合的两相流求解器。这一工作包括开发V6版本中的高精度的几何VOF界面跟踪方法,开发完全耦合的两相流场求解器,开发空泡和空气/水/蒸汽三相交互的混合模型,并发展必要的应用程序的能力。V5.5版的数值方法、HPC和SBD功能区都类似于版本4.5。为实现交互界面追踪,水平集法已被VOF法替代,并纳入单相流场求解器求解。当前版本的代码适用于单相流场求解器、多块网格,湍流和充分的6自由度运动的无嵌套网格。图1表示静水条件下的Numerette滑行艇周围的船体自由表面变形情况。
2.2 V6.1、6.2、6.3版建模,数值计算和HPC
为取得里程碑式成就,下一代的高保真SBD工具和爱荷华船舶CFD软件V6版都在开发新的功能,重点在于提高准确性、 鲁棒性及超大规模的HPC能力。
在版本V6.1中,对于复杂的几何形状,浸入边界法采用笛卡尔网格,基于水平集的鬼流法用于尖锐界面处理,完全两相耦合的VOF方法用于交互界面追踪。V6.2版本以增强界面建模技术的方式扩展了正交曲线坐标网格,但其数值方法和HPC能力和V6.1版类似。
有限差分法用于在非均匀交错网格中离散控制方程,其速度分量定义在该网格单元格的表面中心,所有其他变量定义在单元中心,时间的推进则基于半隐式四步分步法。对角扩散项由二阶Crank-Nicholson法提出,其他项则由二阶显式Adams-Bashforth法提出。连续性方程通过求解压力泊松方程来加强,其对流项使用五阶WENO格式离散,其他项由二阶中心差分格式离散。而压力泊松方程通过从HYPRE库中使用一个半粗糙化的多重网格求解器求解。
通过使用MPI库域的分解(在三个方向)技术并行化代码。所有用于鬼细胞信息交换的处理器间的通信都处于非阻止模式。并行I/O使用MPI2执行这样的所有处理器都同时读取和写入到一个单个文件。为了提高超大型网格(数十亿的网格点)模拟的计算速度、精度和效率,一些增强的技术已投入使用,例如半拉格朗日平流法和优化内存使用方案等。水/空气界面被提取为用于后处理的PLY多边形文件格式。多块网格功能最近已纳入爱荷华船舶CFD软件V6.2版。
一般的曲线网格求解器V6.3版正在开发中,它在V6.1版和v6.2版的成功之上实现了V4.5版的所有功能,并且超越了V4.5版。爱荷华船舶CFD软件V6.3版旨在实现高保真,完全耦合、多尺度、多相、湍流船舶流动与利用数十亿美元的网格点的流体-结构相互作用的高分辨率模拟。方法包括有限体积法,多块,贴体,一般的非正交曲线坐标结构化网格,溢流背景直角坐标网格和高度模块化,写在现代 Fortran(2008)和MPI中的利于开发的代码结构。
精确几何近似的二阶有限体积法用于非光滑、非正交结构化网格的离散化。用中心差分法求解泛性的运动方程得到动量分量和标量,高阶迎风格式用于表面中心的价值重建。精确投影法实现机床精度的质量守恒,在其单元表面中心用中心差分和高阶迎风格式实现逆变容积流量重建。在6.3的I/O中,将使用MPI-3的新功能完成可扩展的MPI通信,MPI子数组数据类型也将广泛用于可扩展的MPI通信。
船舶工程
3.1阻力、耐波性、回转性、敞水条件下操纵性和航向保持性、完整及破舱稳性
阻力和耐波性预测包含在哥德堡 2010 (G2010) 和即将举行的东京 2015 (T2015) 研讨会的内容之中。阻力的预测是CFD在船舶流体力学中的古老应用,自1980年哥德堡会议 (G1980) 其精度有了明显提高,那是1980年举行的第一场CFD研讨会。在2010的研讨会(G2010)中,有89份有关阻力预报的意见书,这是在历代研讨会中阻力预报被提到次数最多的一次。90%以上的模拟使用的网格数都小于10兆,这些阻力预测涉及到了各种各样的应用情况和条件。不仅是阻力,升沉运动、纵倾、局部流场如边界层和伴流、波型等也由许多模拟实验预测。傅汝德数从小到大的各种类型的船舶,包括油轮、集装箱船和水面战舰,都纳入了研究范围。仿真结果表明对于低Fr和高Fr,阻力计算的模拟结果的平均误差相同,都为3.3%D。对于升沉和纵倾的模拟结果则是高Fr下平均误差更低,在低Fr下,升沉和纵倾的平均误差分别为9.7%D和11%D;在高Fr下它们的平均误差分别为35%D和55%D。在耐波性方面,有几个耐波性实验案例由于其突出贡献被列入G2010。自东京2005CFD研讨会(T2005)以来用CFD软件进行耐波性预测的实验迅速增加,事实上,在T2005上只有一例无动力的前进速度衍射实验。这些耐波性预测试验涉及到了各种各样的波条件、佛汝德数和运动条件。船舶类型涉及到油轮、集装箱船和水面战舰等。网格数从0.4兆一直到71兆的都有,并且网格数越大,准确性越高。CFD预测如今被分为两类。第一类是求阻力大小和运动振幅,第二类是求阻力范围和速度大小。仿真结果表明后者的平均误差很大(44 %D),然而其平均误差平均误差还是小于比前者小15%D。
约束和自由运动操纵仿真的内容列入了SIMMAN 2008研讨会和即将举行的SIMMAN 2014研讨会。在约束仿真中的应用包括静态舵、 静态漂移、 纯摇摆、 纯偏航和不同几何形状的偏航和漂移等条件下的PMM型强迫运动。SIMMAN 2008年研讨会中有16份有关强迫运动仿真的意见书,包括RANS、URANS和DES等基于不同CFD模型的方法。它们使用的网格数从2.1兆至250兆的都有。对于舵、附体、大涡漩部分、更复杂的湍流区和CFD静动态预测中的螺旋桨模型改进,需要更精细的网格。总体而言,约束状态下运动仿真的平均误差为13.6%D,其中最大的误差出现在纯偏航和静态舵模拟试验中。对于线性衍射,其偏航力的平均误差(40 %D)要比摇摆力(15 %D)大得多。对于非线性衍射,平均误差值是约40%D。在SIMMAN 2008研讨会中自由运动仿真都是在一定限制下进行的的情况。操纵性模拟包括标准操纵实验如回转试验和Z行操纵实验。结果表明:回转试验运动轨迹的预测有6%D的误差,Z形操纵实验预测的误差更大,为13%D。这些模拟实验的网格大小范围从0.4 M到14.9 M都有。对于大多数SIMMAN 2008研讨会中的算例,推力是分布在桨盘上的体积力以一种非中心的格式迭代,其中忽略了船波对于体积力的影响。最近吴等人用于与RANS代码耦合的山崎螺旋桨模型给出了以交互方式确定螺旋桨船体交互模型,这种模型不需要详细建模。山崎模型基于潜在的理论表述,其螺旋桨可以绑定在旋涡螺旋桨磁盘上,也可以从上面自由拆卸。吴等人表明山崎螺旋桨模型可以成功预测不对称的尾流场。此外,与非中心迭代体积力理论相比,山崎模型对于螺旋桨转速的预测误差更小,前者误差为0.5%D,后者误差为12%D。他们也用更先进的推进系统如水射流,进行了自由运动仿真。萨达特-侯赛尼等人对双体船进行了操纵仿真,并验证了实验结果与实验数据(请参见图2)。进行的模拟要么是裸船体水射流的整体受力模型,要么是利用由泵曲线给出体积力叶轮的实际水射流。此外,CFD模拟的回转实验表明平均误差为9 %D至22.6%D,其中实际水射流模拟的误差最小;Z形实验显示的误差较大。此外,喷水推进系统在大舵角的Z形实验显示了其不足。对于操纵性实验,由于CFD计算与基于系统(SB)的方法相比来说较贵,所以一些研究侧重于利用CFD系统辨识方法改善SB数学模型。荒木等人采用CFD自由运动结果为在平静水中和后波中开发4自由度操纵性数学模型进行了改进。并第一次对不同实验室CFD预测的实验数据,包括IIHR波实验室,进行了验证。在静水中的结果表明,使用从CFD操纵性运动模拟,而不是实际试验得来的操纵系数和舵力的相关参数,基于系统的平均误差从16D%降到了8%D。对于波,荒木等人表明,与原始的从细长体理论计算的波浪载荷的数学模型相比,从CFD的结果建立的波浪载荷的数学模型在拖曳和斜浪方面为操纵实验提供了更好的预测结果。然而,改进的数学模型在强波中显得太过稳定,无法预测其不稳定性,例如周期运动或拉削。为参加SIMMAN2014研讨会,萨达特-侯赛尼等人对KVLLCC2进行了静水中自由运动的操纵性模拟,模拟分别了使用体积力螺旋桨模型和实际螺旋桨(见图 3)。其网格的大小范围是6.
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[147452],资料为PDF文档或Word文档,PDF文档可免费转换为Word

