英语原文共 17 页,剩余内容已隐藏,支付完成后下载完整资料
第2章交通流特征
根据其报告机制,交通传感器可以分为三类:移动传感器,点传感器和空间传感器。移动传感器驻留在车辆中,与车辆一起移动,并随时间记录该特定车辆的位置。点传感器位于道路上的固定位置,可以看到道路上方或下方的车辆通过,并随时间推移仅报告该特定位置的交通数据。一个空间传感器在天空中飞翔,观察一段道路上的交通情况,并记录该特定道路上瞬间的车辆位置。有趣的是,这些传感器报告的流量数据是什么样子,以及根据这些数据确定的流量特征。
2.1移动传感器数据
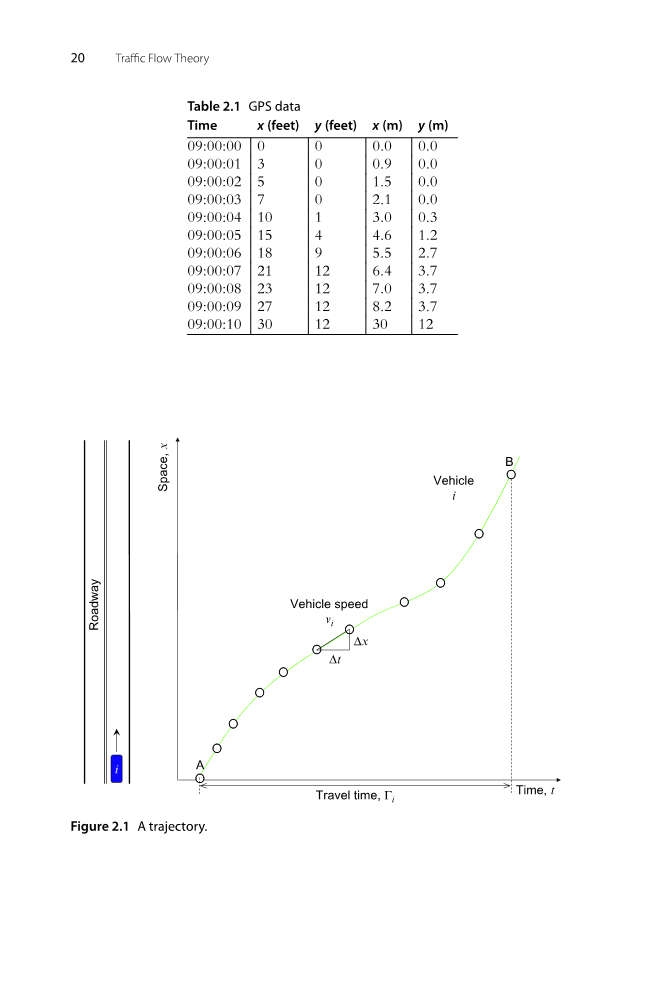
让我们从移动传感器开始。如果车辆配备了全球定位系统(GPS)设备,则该设备可以随时间推移报告车辆的位置。由于GPS信号通常每秒钟(即频率为1Hz)每秒一次,因此GPS数据可能类似于表2.1中的数据,其中车辆的纵向和横向位置与车辆的位置有关在09:00:00。
图2.1显示了一个场景(车辆上带有一个GPS设备和ID号i)在公路上行驶(在左侧绘制)以及相关的时空图(在右侧绘制)。每个圆圈代表一个GPS读数(仅显示x)。如果将这些圆圈连接在一起,则将获得该车辆的轨迹,即车辆的位置 时间的函数:xi = xi(t)。 从GPS数据很容易计算出车辆的速度xi,如图2.1所示:
如果车辆的轨迹是已知且平滑的,我们可以通过获取轨迹的一阶导数来确定xi:
表2.1 GPS数据
|
时间 |
x (英尺) |
y (英尺) |
x (m) |
y (m) |
|---|---|---|---|---|
|
09:00:00 |
0 |
0 |
0.0 |
0.0 |
|
09:00:01 |
3 |
0 |
0.9 |
0.0 |
|
09:00:02 |
5 |
0 |
1.5 |
0.0 |
|
09:00:03 |
7 |
0 |
2.1 |
0.0 |
|
09:00:04 |
10 |
1 |
3.0 |
0.3 |
|
09:00:05 |
15 |
4 |
4.6 |
1.2 |
|
09:00:06 |
18 |
9 |
5.5 |
2.7 |
|
09:00:07 |
21 |
12 |
6.4 |
3.7 |
|
09:00:08 |
23 |
12 |
7.0 |
3.7 |
|
09:00:09 |
27 |
12 |
8.2 |
3.7 |
|
09:00:10 |
30 |
12 |
30 |
12 |
图2.1 一条轨迹
图2.2车辆轨迹
可以从轨迹直接读取车辆在A点和B点之间的行驶时间ti:
图2.2说明了一些假设的车辆轨迹,其中一些是有效的(即有意义的轨迹),而另一些则不是。测试自己,看看是否能够确定哪些轨迹有效,并了解这些车辆的移动方式。曲线(a)是有效的,它显示车辆沿正x方向移动。曲线(b)并非有效轨迹,原因如下。如果一个人画一条垂直线,它可能会多次相交轨迹。这意味着车辆可能会同时出现在多个位置,这是不可能的。出于同样的原因,图(c)和(j)也无效。曲线(d)是有效的,并且该轨迹建议车辆首先向前移动(即沿正数方向),然后在某个时间点后退。曲线(e)是有效的,并且暗示车辆不能移动(可能已停车)。曲线(f)是不可能的,因为它暗示(轨迹的切线)。曲线(g)是有效的,因为车辆只是以时变速度向后移动。曲线(h)是可能的,但是非常不寻常,因为车辆首先以合理的速度运动,然后在最后几乎飞起来。曲线(i)有效,车辆逐渐停止。曲线(k)可以用两种方式解释:一种是两车道场景,其中高速车辆超越慢速车辆;另一种是单车道场景,其中快车与慢车相撞,它们交换了动量。曲线(1)表明,一辆快速的车辆以较低的车辆追赶,随后又以一个单位移动。
2.2点传感器数据
如果在位置x的道路上安装了点传感器(例如环路探测器或摄像机),则该传感器将能够观察在其上方或下方经过的车辆。 在如图2.3所示的时空图中,每辆车都将在此位置计数(例如,刻度线)。 例如,在观察周期T内,传感器总共对N辆车辆进行了计数。N称为流量计数,可以将其转换为小时等效流量(以下称为“流量” q),如下所示: 如下:
图2.3点传感器数据
车头高度定义为两个连续车辆之间的时间间隔,可以确定为:
如果人们忽略了由于首辆和最后一辆车的车头不完全而导致的错误,则观察持续时间T可以表示为:
车辆和点传感器都具有物理尺寸。 如果考虑车辆和传感器的尺寸,则可以从时空图获得更多信息(见图2.4)。
当车辆的前保险杠进入环形检测器的检测区域时,检测器将根据电磁力在检测器中生成检测信号。当车辆的减震器退出检测区域时,信号将下降。对此效果的说明,请参见上方的下图。
图2.4 环路检测器数据
图2.4中的两条轨迹。 如果阈值设置正确,则环路检测器将输出两种状态:当车辆位于环路上方时,此状态为“开”,而在环路上未检测到车辆时,该状态为“关闭”。 当循环输出为“ on”时,循环将变为“忙碌”。通过以上设置,我们可以重新访问上面讨论的某些交通流量特征,并确定更多特征:
流量计数N:由于开启状态包括检测器输出的向上转换和向下转换,因此仅需对所有车辆一致地对向上转换或向下转换进行计数,即可获得流量计数。
车头高度:如果一致选择所有车辆上的参考点(例如前保险杠),则车辆i minus; 1和i之间的车头距离可以计算为, 他们之间的时间差距是。
接通时间xi;i:从车辆前保险杠进入检测区的时间到车辆后保险杠离开检测区的时间:。
车速:在接通时间内,车辆i行驶的距离,其中d是环的宽度(对于小环,通常为6英尺或1.8 m),而是车辆的长度。 因此,车辆的瞬时速度可以确定为 。
占用率o:在交通流理论中,占用率定义为环路繁忙(即,环路检测到上方的车辆)的时间百分比。 因此,如果观察周期为T,在此期间检测到N辆车,则总的通行时间为,并且将占用率确定为o。
时均速度:如果平均车辆速度观察道路数据点,则获得时域中的平均速度,因此,这种平均速度称为“时均速度”。
感兴趣的读者可以参考[1],其中详细讨论了如何测量和计算各种交通流量特性,以及如何引入点传感器固有的误差。
2.3空间数据
如果人们从直升机上拍摄了巷道的航拍照片,则可以在每个快照中找到车辆。例如,图2.5说明了在时间t拍摄的快照,其中车辆被标记为三角形。从这些航拍照片可以确定一些与空间有关的交通流特征:
图2.5 巷道快照
间距定义为两个连续车辆之间的空间间隔,可以确定为:
密度定义为在单位长度上观察到的车辆数量,可以确定为:
其中L是观察路段的长度,N是在这条路段上观察到的车辆数量。 如果由于前车和后车的间距不完全而忽略了错误,则车道L的长度可以表示为:
不幸的是,一个人无法通过一个快照来确定车速,但是有了两个快照(分别在和时),一个人就可以比较车辆位置并找到每辆车所经过的距离,即。 由于已知两个快照之间的时间,因此可以确定每个车辆的速度:
空间平均速度:如果将从航拍照片中获得的车速进行平均,则会得出空间域的平均速度,因此将这种平均速度称为“空间平均速度”。
2.4 时空图及其特征
到目前为止,讨论涵盖了三种类型的传感器(移动,点和空间传感器),这些传感器报告的数据以及使用这些数据确定的交通流特征。将所有内容放在一起并形成完整的图片很有用。图2.6显示了具有车辆轨迹的时空图,其中说明了由三种类型的传感器报告的数据。
图2.6 时空图和三种类型的传感器
表2.2将交通流特征与传感器类型相关联。呈现了三类交通流特征:通量,速度和集中度。在两个细节级别上考虑了这些特性:微观特性是特定于车辆的,因此都带有下标i;宏观特性是聚合的度量,并且聚合可以在车辆,时间或空间上进行。
表2.2 传感器和交通流特征
|
类别 |
感测器 |
微观特征 |
宏观特征 |
|---|---|---|---|
|
移动 |
– |
– |
|
|
流 |
点 |
hi |
N, q |
|
空间 |
– |
– |
|
|
移动 |
x˙i |
– |
|
|
速度 |
点 |
x˙i |
vt |
|
空间 |
x˙i |
vs |
|
|
移动 |
– |
– |
|
|
浓度 |
点 |
xi;i |
o |
|
空间 |
si |
N, k |
2.5 特征之间的关系
迄今为止,已经借助现场观察引入了交通流特征。进一步研究这些交通流特征之间的关系很有趣。
2.5.1 流量,速度和密度
根据定义,以下关系作为恒等式成立:
也就是说,流量q是密度k和空间平均速度的乘积。
2.5.2 流量和前进
根据以上讨论,可以得出以下结论:
,
,
.
因此,流量q是平均车距h的倒数。例如,每小时1200辆车的流量表明平均车速为:
.
2.5.3 密度和间距
同样,
,
,
.
因此,密度k
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238383],资料为PDF文档或Word文档,PDF文档可免费转换为Word

