英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
机械系统和信号处理
将带有无传感器有效载荷偏转反馈的控制用于起重机减振
目录列表可在ScienceDirect
机械系统和信号处理
期刊主页:www.elsevier.com/locate/ymssp
Jaroslaw Smoczek
AGH科技大学机械工程与机器人学院,30 Mickiewicza Av。,30-059克拉科夫,波
兰
关键词:
无传感器防摇控制;
模糊逻辑;
可靠的控制;
区间分析。
摘要:
不同类型的起重机被广泛用于在建筑工地,船运码头,集装箱码头和许多制造业转移货物,其中通过减少振荡快速且精确地传输悬挂在绳索上的有效载荷对于提高生产率,效率和工作的安全性意义重大。 本文提出了基于模糊逻辑的鲁棒反馈防摆控制系统,该系统既可以使用有载荷摇摆角传感器,也可以不使用有效载荷摇摆角传感器。 离散时间控制方法基于控制器的模糊插值和起重机动态模型关于绳索长度和有效载荷的质量变,提出了结合极点配置方法和闭环特征多项式系数区间分析的迭代过程来设计鲁棒控制方案。 开发了在使用PAC系统和RX3i控制器的情况下的无传感器防摇控制应用程序,并将其在实验室标定的桥式起重机上进行了验证。
&2013 Elsevier Ltd.保留所有权利。
1.简介
对于许多灵活的系统来说,减小振动是一个令人十分关心的问题,这些系统包括从灵活的机械臂[1,2] 到广泛用于建筑工地、船运码头、集装箱码头和许多制造业部门的大型工业起重机[3,4]。 不同类型的起重机(例如集装箱起重机,高架起重机,塔式起重机,起重机臂)通过移动悬挂在柔性绳索末端的货物来实现运输作业。 因此,要将降低波动效应的控制系统用于解决起重机操作的定位精度,有效性和安全性的问题。
许多研究人员已经提出了用于减振的开环或闭环控制解决方案,并经常将这些解决方案应用于起重机防摆动控制问题。 一方面,反馈控制策略要求安装可靠的测量系统,但这有时难以维护并且成本高昂。 另一方面,通常基于输入整形而开发的开环防摇控制系统[5–7] 或最优控制理论[8,9],由于有效载荷反馈的摇摆角度不足而对干扰十分敏感, 因此,一些工程将开环控制方案与反馈解决方案结合起来,以减少由操作员和外部干扰引起的摆动[10]。
软计算技术,特别是模糊逻辑,被广泛应用于柔性动力系统的闭环控制方案。 基于语言规则的模糊控制器被报道在[11–13]。 基于模糊逻辑的策略被提出用于PID增益调整[14,15] 和滑动模式控制[16]。 Takagi-Sugeno-Kang型模糊控制器在参考文献中提出[17–19]。 一些研究人员采用离线或在线技术来设计基于模糊规则的控制器用于起重机控制方案。 基于逆动态已经开发了成员函数调整技术[20],梯度算法[21],遗传算法[22,23],模糊聚类方法[19],及应用人工神经网络[18,24]。
文献中描述的大多数基于模糊逻辑的起重机抗摇摆控制问题方法都是基于语言规则的策略,所提出的模糊控制器设计技术大多仅适用于涉及训练数据示例的固定数量的规则来调整隶属函数参数。 起重机控制系统的稳定性也经常仅仅考虑绳长变化而进行分析。 此外,大多数控制策略通过数学模型或机电实验室模型进行验证。 因此,对于那些正在寻找可以在工业实践中实施的起重机控制系统的测量设备,高效控制规律,软硬件解决方案的研究人员来说仍然有一席之地。
本文提出了一种基于模糊逻辑的鲁棒反馈防摆控制系统,该系统既可以使用有载荷摇摆角度传感器,也可以不使用有效载荷摇摆角度传感器。 介绍了无传感器有效载荷偏转反馈闭环防摇控制的新颖方法,以及基于模糊逻辑的控制方案的区间分析设计。 无传感器抗摇摆离散时间控制方法基于由钟摆模型估算的有效载荷偏转的反馈信号,该钟摆模型被表示为负载的摇摆角度与起重机速度之间的离散时间关系。 应用模糊系统对线性控制器和起重机动态模型参数绳索长度和质量进行插值。开发了结合极点配置方法和闭环特征多项式系数区间分析的迭代程序,设计了模糊逻辑的鲁棒控制方案。 鲁棒控制系统设计的目标是通过开环识别实验找到离散时间动态下起重机模型参数估计的最小操作点数量,并且使用极点布置方法确定线性控制器参数。 设计一个基于模糊逻辑的调度系统,并确定在调度变量论域上的模糊规则和模糊集的适当数量和三角形隶属函数参数的分布,使其满足在该范围内的性能恶化参数变化在可接受的预期范围内。 所提出的方法被用于设计和实施实验室规模高架起重机上的无传感器防摇控制系统,该系统是带有RX3i控制器的PAC系统。
本文的结构如下 ,第二节描述了一个基于模糊逻辑的起重机平面模型离散时间闭环控制方案。 在第三节中,提出了用于设计模糊调度器的完整和一致的规则库(RB)的迭代过程。 第四部分介绍了实验室标定的桥式起重机的实验结果。第五部分提供了最终结论。
2.基于模糊插值的控制方案
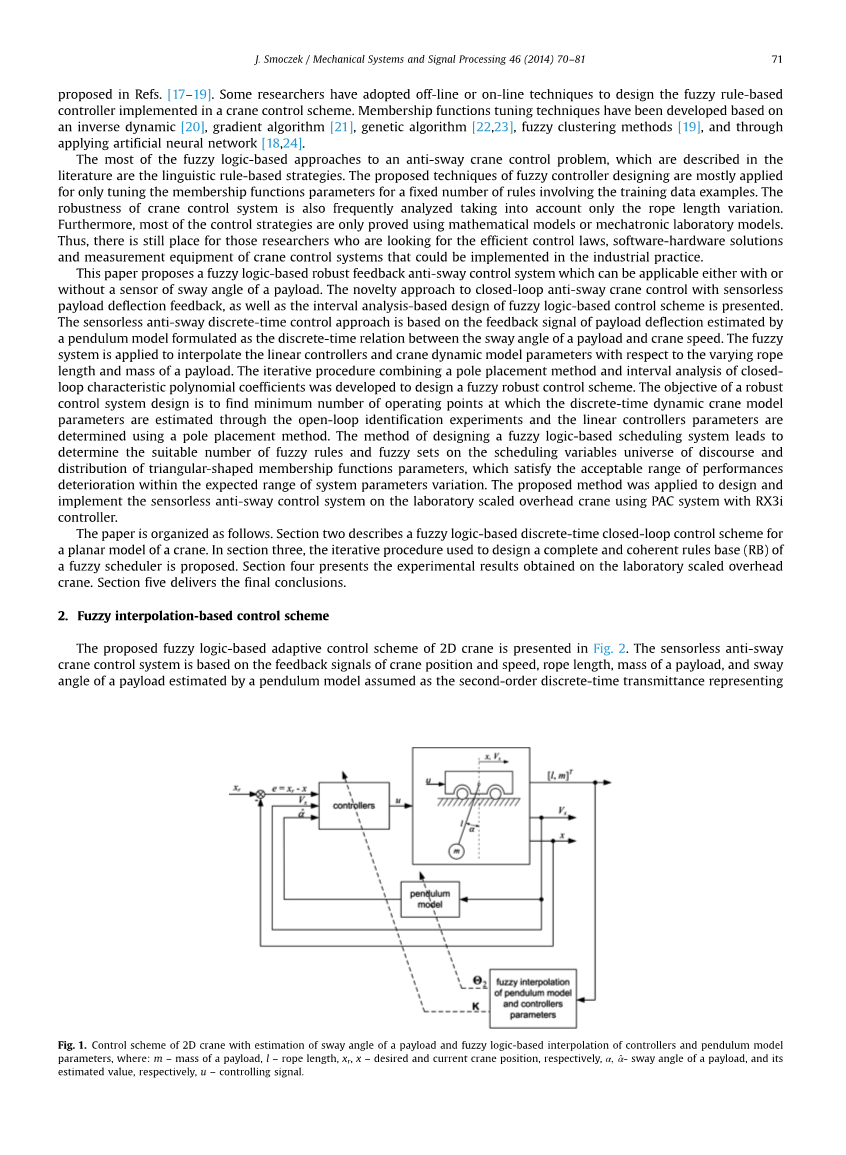
基于模糊逻辑的2D起重机自适应控制方案如图2。 起重机无传感器防摇控制系统是基于起重机位置和速度的反馈信号。绳索长度,有效载荷的质量和由假设为二阶离散时间透射率表示的钟摆模型估算的有效载荷的摇摆角度alpha;与起重机速度Vx之间的关系。 通过基于调度变量的模糊系统对控制器和模型参数进行插值:绳索长度l和有效载荷的质量m。
模糊插值方案由一组N个规则组成(1),其中singleton类型的结论表示在与三角形隶属函数的中心点关联的操作点处确定的控制器和模型参数(图2),并用于评估l和m的确定输入值对规则前提中指定模糊集的隶属度:
Rk : 如果l是L1,m是M1,则yk为 [ Kk,,Theta;2k] (1)
其中yk是规则输出(其中k = 1,2,...,N),Kk和theta;2k向量分别是在工作点(li,mj)处确定的控制器和摇摆质量模型参数的向量,模糊集合Li和Mj是三角隶属函数中心点(图2)对l和m输入变量论域,其中i = 1,2,...,n及j = 1,2,...,r(n和r分别是为l和m定义的模糊集的数量)。
图1:二维起重机的控制方案,估算有效载荷摇摆角和基于模糊逻辑的控制器插值和摇摆模型参数,其中:m -有效载荷质量,l - 绳索长度,xr,x – 分别为所需和当前起重机位置;alpha;,alpha;^ -分别为有效载荷的摇摆角度及其估计值;u-控制信号。
图2.l和m输入变量上的模糊集定义的隶属函数。
模糊集合Li和Mj对应于,三角形隶属函数(2)和(3)与中心点[l1,l2,...,ln]和[m1,m2,...,mr]分布在调度变量的预期范围内。
(2)
其中 :
(3)
其中:
模糊调度器的输出向量为所有规则输出的加权平均值:
(4)
其中规则的激活程度(规则的权重)计算如下:
(5)
在已出版的作品中,起重机系统大多是基于集中质量来建模的[12,25]或分布式质量[26,27]的做法。最广泛使用的集中质量模型是基于假设有效载荷是无质量刚性杆末端处的点质量。 Abdel-Rahman等人在一篇起重机评论文章中[28]将集中质量模型分为简化模型和扩展模型,其中分别考虑移动荷载是否影响起重机动态响应。文献中报道的大多数防摇控制方案是基于由欧拉--拉格朗日方程导出的起重机动态模型开发的。本文将起重机动力学系统建模为起重机的集中质量平面模型,将其简化为一阶和二阶的离散时间传递函数,描述起重机速度与输入函数之间的关系(6),以及有效载荷的摇摆角度和起重机速度之间的关系(7),其中模型参数相对于绳索长度l和有效载荷的质量m的变化而而变化。
图3.离散时间闭环控制系统。
(6)
(7)
闭环控制系统(图3)是基于用于起重机位置、速度和有效载荷摇摆角的一阶离散时间控制器的线性控制器,其中参数 为一组N个操作与隶属函数的中心点(li,mj)相关的点(图2).
考虑到上述假设,闭环控制系统的设计涉及选择适当数量的与三角形隶属函数的中点(li,mj)对应的操作点,起重机动态模型参数及以离散时间的形式呈现,被确定,透过率(6)和(7)在开环实验和控制器参数中被识别,闭环控制综合的目的是找出模糊数,设置和分配隶属函数参数,以确保在期望的参数变化范围内达到期望的性能。
3. 模糊插值方案设计的迭代过程
闭环控制系统(图3)传递函数可以按以下形式呈现:
(8)
其中z=[z4,z3,z2,z1,z0],S是由模型参数组成的消除矩阵,R是由模糊系统插值所得的包含控制器参数的矢量。
模糊调度器的RB可以通过在期望极点间隔的中点分配闭环控制系统极点来确定。模糊调度器的目标是将所有闭环控制系统特征多项式系数放置在期望的时间间隔内。因此,可以根据由Diophantine方程得出的目标函数,得到一组满足鲁棒性能的隶属函数中心点的操作点集合。考虑到在每个k=1,2,...,N工作点(li,mj)处的闭环控制系统的所有极点zf(其中f = 1,2,...,5),被分配在实数的中点处表示稳定极点的期望区域的区间表示为:
(9)
如果闭环系统特征方程的系数位于期望的多项式系数区间内,则基于模糊逻辑的控制系统性能满足期望的条件(10),使用间隔的算术运算确定[29]:
(10)
其中[Pk]是期望的特征方程系数的区间向量:
(11)
因此,在规则结论中定义的控制器参数向量Kk(1) 可以根据方程组确定:
(12)
其中:
,Pk由区间向量[Pk]中点组成。
由方程组(12)鲁棒性能目标函数定义为:
(13)
因此,基于模糊逻辑的控制方案满足系统参数在期望的绳索长度和有效载荷的质量内变化的期望性能,如果条件(13)没有违反区间向量(11)与已经被激活的规则相关联,以使用击发强度因子wkgt;0来内插控制器参数。
本节描述的迭代过程允许确定l和m上模糊集的最小数量调度变量论域,并确定模糊插值器的完整和相干RB。所提出的算法涉及识别参数模型(6)和(7)的起重机动态性在对应于调度变量区间[1-,1 ]和[m-,m ]的下限和上限的操作点处并且假定三角形的中心,l1 = 1-,ln=l ,m1 = m-和mr = m 。假设所需的极点间隔(9)对于每个工作点(l1,m1),(l1,mr),(ln,m1)和(ln,mr),控制器参数的矢量取自(12),最初的一套制定规则如下:
R1:如果l是L1且m是M1,则y1为:
R2:如果l是L1且m是Mr,则y2为:
R3:如果l是Ln且m是M1,则y3为:
全文共12360字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[13774],资料为PDF文档或Word文档,PDF文档可免费转换为Word

