英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
关于两级摆线针轮减速机的设计
关于两级摆线针轮减速机的设计以下是本文的研究内容。利用单级摆线减速器的简单组合,得到了一种传统的两级摆线减速器。单级减速器连接两个相同的摆线盘,以平衡动载荷,获得均匀的载荷分布。因此,传统的两级减速器总共有四个摆线盘。本文介绍了一种新设计的两级摆线减速器,每个级有一个摆线盘,即两个摆线盘,这意味着它相当紧凑。由于其独特的概念,该减速器具有良好的负荷分布和动平衡特性,本文对此进行了描述。 利用有限元法对摆线减速器元件的应力状态分析,实现了共轭齿轮作用的最关键情况(一、二、三对齿连续)。结果表明,摆线盘的载荷是相当均匀的,符合本文提出的设计方案。采用应变片法对摆线盘的应力状态进行了实验分析。根据所得结果,很容易得出这样的结论:即使在最关键的情况下(一对接触齿),摆线盘上的应力也在允许的限度内,从而为减速器的正常寿命提供正常功能。
- 介绍
根据现代复杂机械结构领域的发展趋势,高传动比、低损耗的大功率传动齿轮已成为必然。考虑到标准传动齿轮在功率和尺寸方面的局限性,行星齿轮已开始被用作复杂传动齿轮的替代品。
摆线减速器属于一组新的行星齿轮.。它们在现代工业中得到了广泛的应用。最常见的应用领域是机器人工业,萨特尔,IT技术,机床,电梯,加工工业,运输机等。摆线减速器由于具有工作寿命长、工作可靠、传动比范围大、传动比极高等优点,得到了广泛的应用。在动态载荷条件下工作可靠,设计紧凑,效率系数高。
本文介绍了摆线减速器的基本情况,摆线盘齿的齿廓生成方法,以及摆线盘齿的单元加载方法,参考文献。[1-3]。Litvin[4]研究了一些特殊共轭齿轮副的曲面几何。Blanche和Yang[5,6]分析了加工公差对间隙和扭矩脉动的影响。销齿传动是一些特殊应用中的一种防侧隙齿轮[7]。分析了摆线泵转子前文件几何的修改[8]。李文和冯[9]分析了它们的属改进了平面摆线齿轮的设计,消除了原文件和曲面的奇点。摘要为了实现摆线盘齿的齿形修形,本文实现了摆线盘齿的齿形参考文献中摆线齿轮的工作特性[10]。这些修改对减速器单元的力、应力和变形的分布有重要的影响。Chmurawa和John[11]用有限元法对摆线盘进行了应力应变分析。Yan 和Lai[12]开发了一种圆柱齿轮传动的摆线减速器,并推导出了啮合方程。一齿差
摆线驱动器是当今最常用的。Chen等人[13]研究了环形齿轮与摆线盘齿差数为1、2、3和1时的摆线传动。Hwang和Hsieh[14]导出了两种摆线齿廓的数学模型:针轮齿形啮合和针轮差动啮合、销轮齿形啮合和针轮差动啮合。在接触力和曲率分析的基础上,得出针轮下置啮合设计具有较好的特点。他们还导出了无量纲的无量纲无量纲的摆线减速机和齿轮减速器的无量纲方程[15]。Meng等人[ 16 ]导出了摆线减速机包括摩擦的数学模型。Sensinger[17]发明了一种用于应力和效率优化的摆线传动轮廓的方法。介绍了摆线减速器的动态特性[18-20]。
为了改善摆线减速器的工作特性(效率系数、传动比、尺寸等),人们一直倾向于采用新的设计方案。本文介绍了一种双曲柄环板式摆线传动,它能传递比现有行星摆线传动更大的扭矩[21]。Gorla等人[22]开发了一种新型的自行车。摆线盘上装有外环齿轮和圆柱滚子的减速器。他们导出了计算摆线传动装置上的接触力、功率损失的程序,以及理论机械效率。本文介绍了一种基于纯滚动接触的行星凸轮传动系统的创新设计[23]。
本文介绍了一种新设计的两级摆线减速器.。介绍了计算作用在其单元上的荷载的程序。采用数值和实验相结合的方法,实现了减速器关键元件的应力状态分析。
- 两级摆线减速器的传统和新概念
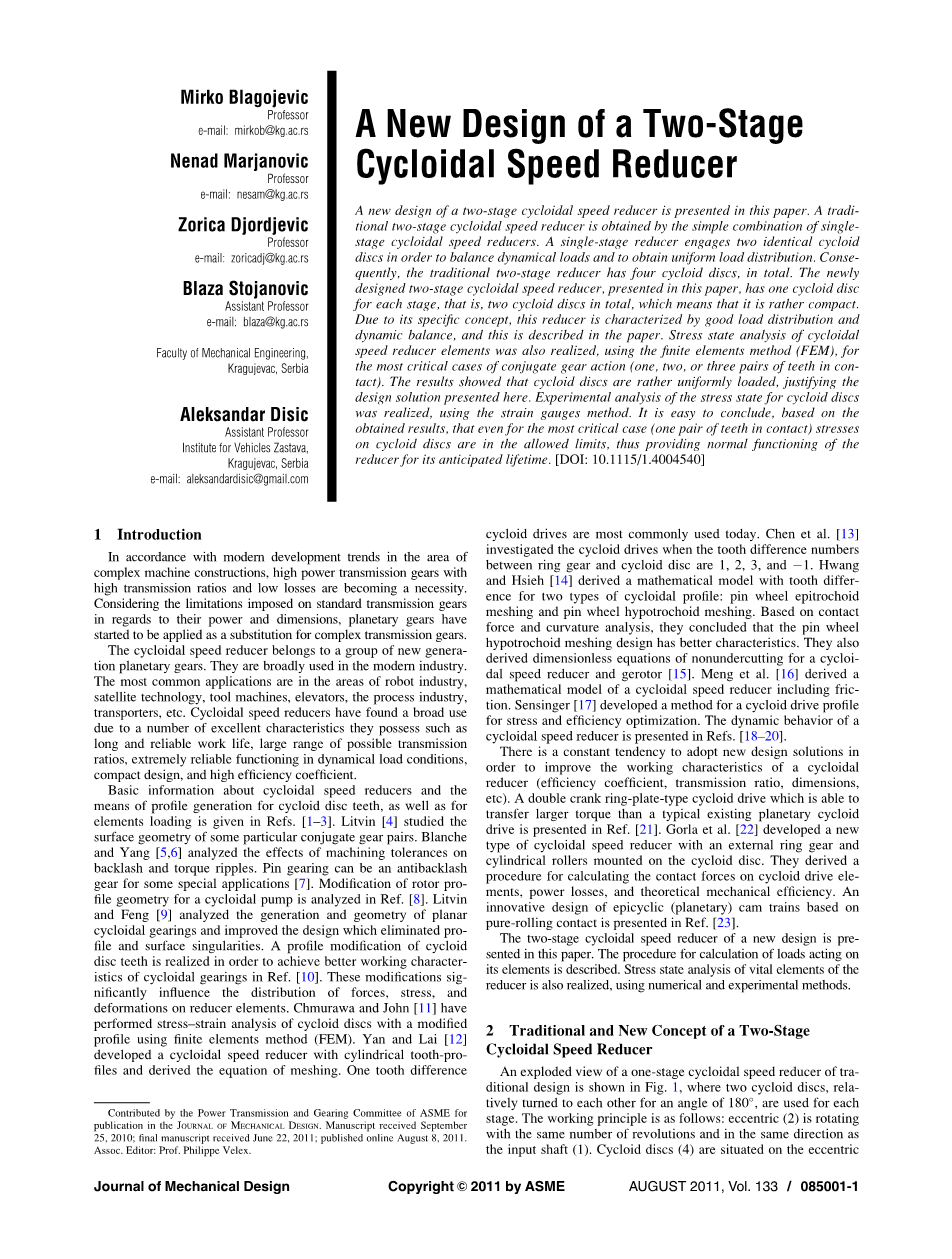
图1示出了传统设计的单级摆线减速器的分解视图,其中两个摆线盘相对于彼此以180°的角度彼此相对地转动。其工作原理如下:偏心(2)旋转与输入轴(1)的旋转数相同,方向相同。摆线盘(4)位于偏心上,直通轴承(3)。摆线盘与位于环形齿轮(5)的主体内的环形齿轮辊(6)共轭。这种共轭的结果是摆线盘的复杂运动,N,它起源于偏心,在输入轴旋转和摆线盘围绕自己的轴在相反的方向旋转的直径。输出辊(7),其载体(8)与输出轴(9)紧密连接,穿过摆线盘的圆形开口,将其运动传递给输出轴。
图1 单级摆线减速器
将单级摆线减速器组合成多级摆线减速器。单级和三级摆线减速器输入输出轴向相反方向转动,而在两级减速器上,两轴的旋转方向相同。图2中介绍了一种传统设计的两级摆线减速器。
从图2可以看出,传统设计的两级摆线减速器是由两个单级摆线减速器的简单组合构的第一级输出轴同时输入第二级输入轴。考虑到每一阶段使用两个相同的摆线盘,相互旋转。以180为角度,为了得到均匀的载荷分布,传统的两级摆线减速器总共有四个摆线盘。
图2
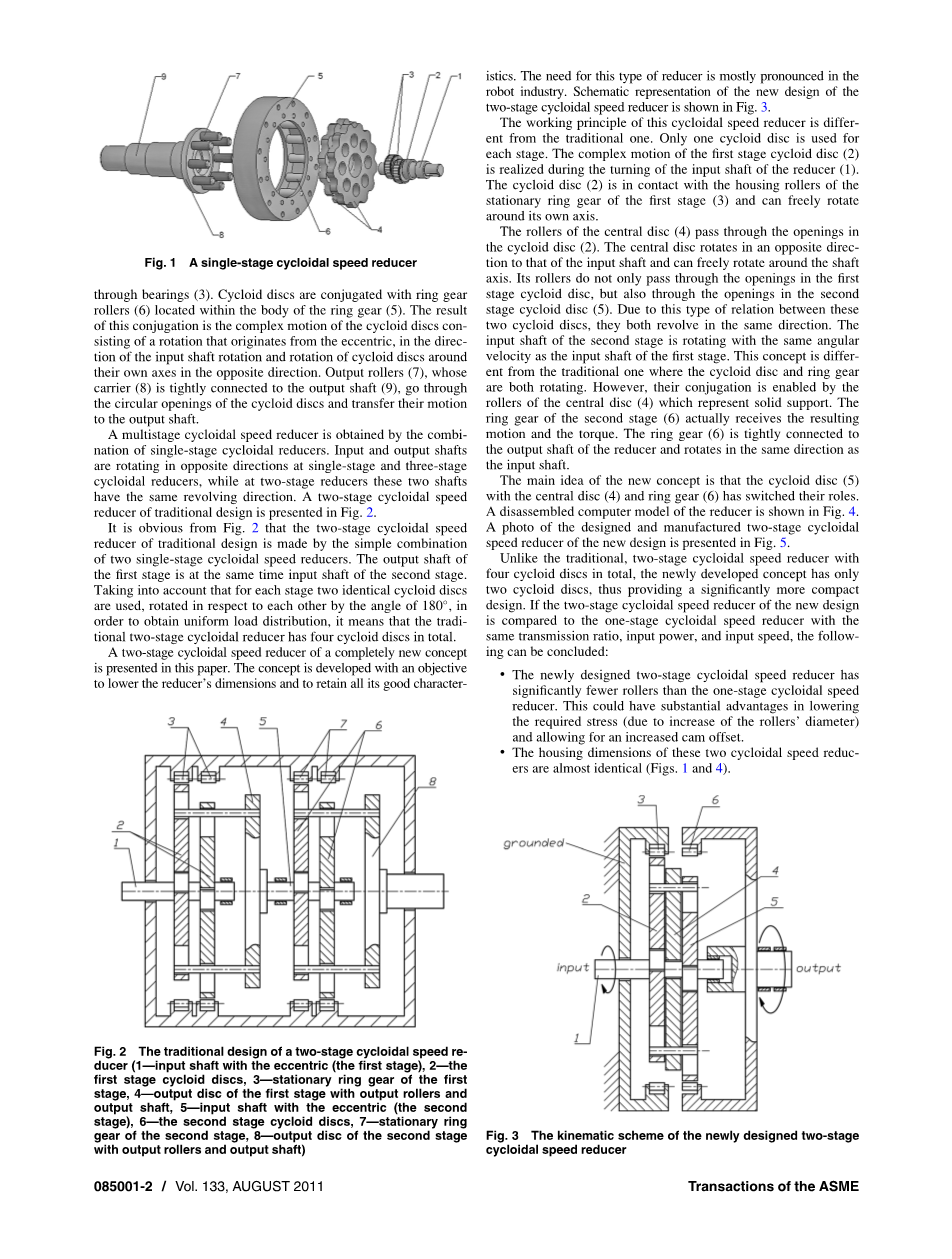
传统的两级摆线减速器的设计(1输入轴偏心(第一级),2-一级摆线盘,第一级固定环齿轮,4级输出)。第一级带输出辊和输出轴的圆盘,5-偏心输入轴(第2级),6-第二级摆线盘,7-第二级固定环齿轮,8-带输出辊和输出轴的第二级输出盘。这种减速器的需求在机器人工业中很明显。两级摆线减速器新设计的原理图如图3所示。
这种摆线减速器的工作原理不同于传统的摆线减速器。每个阶段只使用一个摆线盘。第一级摆线盘(2)的复运动是在减速器(1)输入轴的转动过程中实现的。摆线盘(2)与第一级(3)的固定环齿轮的壳体滚子接触,并可自由绕其自身轴旋转。
中央圆盘(4)的滚子通过摆线盘(2)中的开口。中心盘与输入轴的旋转方向相反,可自由绕轴轴旋转。其滚子不仅通过第一级摆线盘的开口,而且通过第二级摆线盘(5)的开口。由于这两个摆线盘之间的这种关系,它们都向同一方向旋转。第二级的输入轴以与第一级输入轴相同的角速度旋转。这一概念与传统的摆线盘和摆线的概念不同。G齿轮都是旋转的。然而,它们的共轭是由代表坚实支撑的中央盘(4)的滚子所实现的。第二级(6)的环形齿轮实际上接收所产生的运动和扭矩。所述环形齿轮(6)与减速器的输出轴紧密连接,并与输入轴向相同的方向旋转。
新概念的主要思想是,具有中央盘(4)和环形齿轮(6)的摆线盘(5)已经改变了它们的作用。该减速器的拆卸计算机模型如图4所示。图中给出了新设计的两级摆线减速器的设计和制造如图5所示。
与传统的两级摆线减速器不同的是,新开发的概念只有两个摆线盘,从而提供了更紧凑的设计。如果将新设计的两级摆线减速器与相同传动比、输入功率和输入速度的单级摆线减速器进行比较,则可实现后续的工作包括如下:
新设计的两级摆线减速器比单级摆线减速器具有更少的滚子.。这在降低所需压力方面有很大的优势。(由于滚子直径的增加)并允许增加凸轮偏移量。
这两种摆线速度剩馀器的外壳尺寸几乎相同(图1和图4)。
图3 新型两级摆线减速器的运动学方案
图4 一种新设计的两级摆线减速器
在新设计的两级摆线减速器上,运动部件较少,因此传动装置的噪音可能较小。
第二阶段的摆线盘也是偏心振动的。这样,它就可以消除第一个摆线盘的偏心振动(就像传统的摆线减速器一样)。
- 摆线减速器负载传动比,总齿轮比
考虑到这是两级摆线减速器的一个全新概念,根据文献,如参考文献。[1-3,10,20,21]。新概念的基本特点如下:
1、第一级和第二级具有共同的输入轴。
2、对于每个阶段,只使用一个摆线盘。
3、第一级和第二级摆线盘由中心圆盘滚子相互连接。
4、摆线盘和环形齿轮都可以在秒级旋转。然而它们的共轭是由代表坚实支撑的中央盘(4)的滚筒所实现的。
图5摆线减速器物理模型(Journal of Mechanical设计)
由于本文的主要目的是定义和分析新型锥型两级摆线减速器的理论模型,所以忽略了减速器的所有损失。
3.1转矩。–驱动力矩电机转矩(TEM)是分为两部分:
第一阶段的驱动扭矩,,
第二级驱动扭矩,
(1)
第一级和第二级传动力矩的相互关系取决于第一传动比u1,并由表达式定义
(2)
减速器的输出扭矩等于第二阶段TII2环齿轮上的扭矩。
(3)
u2-第二个传动比。
考虑到第一阶段和第二阶段的摆线盘的连接,下列方程是有效的:
(4)
其中,Ti3是第一级摆线盘上的扭矩,TII3是第二级摆线盘上的扭矩。
第一级摆线盘的力矩平衡方程由下列表达式[10,11]给出:
(5)
TI2-扭矩对固定环齿轮的第一阶段。
对于第二阶段,以下平衡方程是有效的:
(6)
TII2-第二阶段可旋转的环形齿轮上的扭矩。
通过计算1—6,得到下列方程组:
(7)
(8)
(9)
(10)
(11)
(12)
考虑到全新的扭矩分布,第一级和第二级摆线盘的载荷几乎是均匀的,这有助于减速器的动态平衡,就像在cas中一样。传统概念的e。这样,两个摆线盘的效果几乎与使用四个摆线盘的经典两级摆线减速器的效果差不多。作为回报,这大大有助于减少还原剂二聚体,这可以很容易地看到通过比较图2和图3。
在传统概念的情况下,通过使用两个相同的摆线盘来平衡中径力,在每一阶段中,它们相互相交180度。在新概念的情况下,不执行此操作。然而,离心力的平衡是由第一级和第二级的摆线盘提供的,第一级和第二级的摆线盘也可转动180。此外,他们扭矩相等(不考虑损失),它们的几何特性也是相似的。
3.2接触力。
在理论上,摆线盘的所有齿都与齿圈的相应滚子接触,其中一半是传递载荷。参考文献中详细介绍了这一情况的计算过程。[1-3,21]。然而,在实际应用中并非如此,因为在环齿滚子和摆线盘的齿之间存在一定的间隙,以补偿在ma中所产生的误差。制造过程的摆线盘,为润滑提供更好的条件,方便减速器的装配和拆卸等.。这些间隙的大小直接影响到该区域的分布。接触摆线盘齿与环形齿轮滚轮接触的触觉力。这意味着随着透明尺寸的增大,相应的传递荷载单元数也在减少。在本文中,只考虑了加工公差。他接触过各种力量。与环形齿轮滚子和输出滚子接触的摆线盘如图6所示。
接触力的值取决于间隙的大小,即传递载荷的摆线盘齿(环形齿轮的滚子)的数目。
环形齿轮的扭矩可计算为 (13)
其中,FNi是在摆线盘齿和环形齿轮滚子之间出现的接触力和ri是摆线减速器R中心与相应接触力之间的正常距离。
以下关系式在接触力FNi(Fnk)与相应距离ri(Rk)之间是有效的。
(14)
方程(14)代表了一种由Malhotra[3]的工作导出的接触力计算的近似方法。这一方法对于结果的相关性来说是足够令人满意的。
图6第一级摆线盘
表1接触力近似值
|
接触齿数 |
FN1, N |
FN2, N |
FN3, N |
|
|
1 |
(第一阶段) |
5091 |
– |
– |
|
2 |
(第一阶段) |
2432 |
2543 |
– |
|
3 |
(第一阶段) |
2166 |
2265 |
1098 |
|
1 |
(第二阶段) |
5278 |
– |
– |
|
2 |
(第二阶段) |
2378 |
2625 |
– |
|
3 |
(第二阶段) |
2006 |
2215 |
1287 |
当摆线减速器有间隙时,可以计算接触力的近似值,(13)及(14)。例如,当三对牙齿接触时,接触力等于
基于Malhotra (3)详细描述了表达式的计算距离
(15)
其中ra是摆线盘
全文共10024字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11453],资料为PDF文档或Word文档,PDF文档可免费转换为Word

