
英语原文共 21 页,剩余内容已隐藏,支付完成后下载完整资料
球形机器人机械驱动原理综述
Richard Chase and Abhilash Pandya
计算机电子工程系,韦恩州立大学,
5050 Anthony Wayne Drive, Detroit, MI 48202, USA; E-Mail: apandya@wayne.edu
摘要:鉴于球形全向性,封闭的内部环境和容易碰撞反弹的特性,球形机器人是一个新兴研究领域。随着研究的推进,各个研究团队开始研发出不同的工程协定:重力式驱动;减速提高控制精度;等等。早期球形机器人和仓鼠球操控原理类似,扭转力有限,由于内部摩擦力而能量损耗严重。研究者开始采用各种新的理念来操纵控制这类机器人。本文回顾了各个团队采取的研究方向,在这个分支中采用的命名,和各个物理基础原理在球形机器人中的使用。
关键词:球形机器人;全向;全向机器人;控制力矩螺旋
1.引言
球形机器人是一个很有前途的研究领域,并且有很多独特的特征,这些都值得研究的。它们可以被设计成密封形式来抵御恶劣的环境,全向运动(本文的目的,系统的全向性指的是机器人的意义上的全向性而不是指多体动力学意义上的全向性。一个在机器人中的全向系统是指其方向不影响预期的运动方向。例如,汽车必须将其前端指向其预期的行驶方向,如果设计成球形机器人,则可以在任何运动阶段改变方向而不必重新定向),并以快速和非破坏性的方式从碰撞中反弹[1]。球形机器人已经开始用于水下实验[2,3],儿童发展研究[4]和安全侦察[5-7]。一些研究人员甚至已经开始研发许多这些类型的机器人来执行任务 [8]。
由于球的性质,具有球壳的机器人将沿着阻力最小的路径运动。典型的球形机器人具有真正的全向性,因此可以在任何方向上移动而不必改变定位。目前球形机器人的研究方向主要集中在内部机构和相应的控制系统上。还没有一种设计能在其他设计中占据主导地位,内部驱动力学的方法的多样性导致了机器人特性和能力的多种多样。由于研究工作零星而不协调,研究人员尚未建立一个已经优化并高效的系统[9]。
通常,球形机器人的驱动系统位于壳体内部。为了使外壳旋转,驱动系统必须能够以某种方式将能量传递给外壳:诸如齿轮的固定机械部件,诸如电动机的电磁装置等。为了实现真正的全向性,搜索难题正在变为研发一种内部驱动机制,这种机制保证了无论球体或驱动机构的方向如何,都可以向可任意旋转的球体提供全方位的输出扭矩。实质上,内部机构必须能够独立于外壳三维地旋转。由于外壳必须以某种方式连接到内部机械装置,所以这构成了困难的设计挑战。然而,解决这个问题的方法有很多,但是每种方法都有其自身的障碍。
这些障碍已经促进产生了许多内部推进装置的变化,每一个都采用牺牲转矩来达到全向运动,对速度的控制等目的。这些系统中的一些简单,一些具有更复杂的控制算法的复杂设计。一些团队甚至开始通过改变外壳物理特性来研究推进力,这可能导致一个全新的机器人家族。以下是球形机器人内部驱动的一些概念和许多新颖变化的视图,第一个是基于重心偏移概念的设计。早期和当前的大多数设计都是基于移动球体平衡的原则[1],其中最常见的是改变球体的重心。
本文讨论了用于推进球形机器人的三种主要原理类型:第二节讨论的重心偏移(BCO),第三节讨论的壳变换(ST),第四节讨论的角动量守恒(COAM)。在讨论每种类型的原则时,将分别讨论典型原则的应用实例。此外,还会在适当的位置讨论诸如腿,传感器和新配置等新增功能。最后,在第5部分的一个分类表中将介绍与每个相关的原则,基本使用情况和功率限制。
2.重心偏移(BCO)
2.1. 主要原理
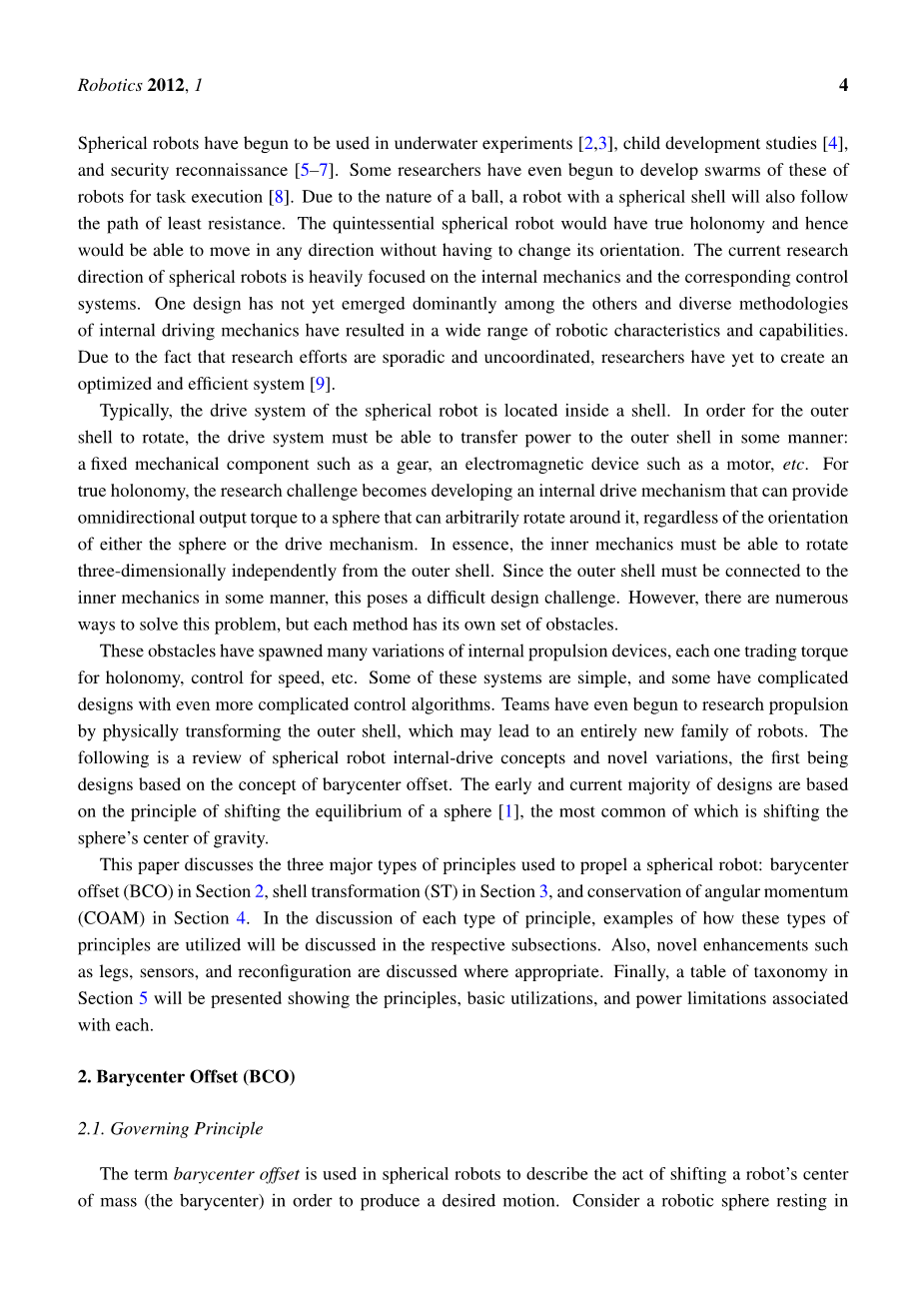
重心偏移在球形机器人中是指移动机器人质心(重心)以产生期望的运动。假设机器人球体处于平衡状态。随着其内部机构的移动,球的质量分布将会移动,导致球滚到一个新的平衡位置。通过适当的时间和控制方法,机器人可以在其环境中平稳移动。然而,这种方法的主要限制是最大输出转矩受到限制,因为重心不能移到壳外。这可以通过描绘球体内的摆锤来最好地说明,这是一种常见而直接的设计。一个简化的二维模型(见图1)说明了这个可以生成扭矩并且作用于外部球壳。一个给定质量的重物在机器人的中心轴线上的支撑杆上围绕电枢摆动。当摇摆转动时,质量中心相应旋转,机器人转动到平衡状态。
图1.球形机器人模型的截面图,表示出摆锤驱动电枢和配重。
1旋转轴(Z轴)2旋转角(theta)3质心位移4配重
可以施加的扭矩的最大值是
tau;max=mg*r*sin(theta;) (1)
其中tau;是关于Z轴的输出扭矩(图1,项目1),mg是波纹管的重量(图1,项目4),r是质心与壳体重心的位移(图1,项目3 ),sin(theta;)对应于水平方向的旋转角度(图1,项目2)。以下是重心偏移设计的变体。
2.2.主要原理的应用
2.2.1 仓鼠球
重心偏移系统的早期设计通常被称为仓鼠球式设计[10]。这个设计被昵称为此是因为它形象的模仿了玩具球中的仓鼠。一个带有小轮子的机器人放在球内,大多数情况下是一个小型的遥控车,机器人的重量提供足够的力量来推动机器人移动(图2)。球壳的运动和汽车一样并不是全向运动。内部机器人的航向必须改变以改变行驶方向。可以使用单轮或多轮车辆,和单轮车辆不同,四轮差速驱动车辆将形成不同的运动曲线 [10]。四轮驱动系统可以充当差速驱动器,赋予机器人转向的能力,从而增加了车辆的全向性。此外,这个设计相对容易建模,制作和控制。只要最终的任务不需要非常准确的跟踪,控制就相当简单,因为它可以和操纵任何类型的基本遥控车一样。
图2.仓鼠球式设计的原型[10]。
其中一个主要缺点是内部机器人或驱动机构通常会发生打滑。然而,一个闭环控制系统结合适当的内部跟踪传感器可以计算这个打滑效果,并可能减轻这个问题[10]。除了由于摩擦引起的能量损失和控制复杂性之外,这种设计的另一个缺点是机器人遇到空气或遇到颠簸时而脱离支撑面。当内部车辆脱离支撑面,外壳与内部机器人车轮之间的牵引力变为零,外壳将失去动力。此外,位置跟踪可能受到影响。虽然这个问题可以通过传感器和适当的控制系统进行一定程度的调整,但是在导航精度至关重要的任务中,这个调整方法是不可接受的。
2.2.2 内部驱动单元(IDU)
为了避免与内部机器人相关的调整问题,几个重心偏置设计已经结合了一个系统,该系统通过弹簧加载或固定机构迫使机器人的车轮与外壳保持恒定的接触。在弹簧加载的设计中,内部机器人的顶部连接有一根杆和一根弹簧,然后压在壳体上,迫使轮子始终与壳体接触。弹簧的顶端是一个3自由度(DOF)滚珠轴承,允许弹簧沿内壳表面行进,摩擦很小(图3)。
图3.弹簧加载设计的结构。
1 机器人机身(机箱),2 控制箱,3 驱动轮,4 操纵轴,5 支撑轴,6 弹簧,7 平衡轮[1]。
虽然这仍然是一个常用的低成本设计,但在高速度下,基于IDU的机器人的航向难以控制[1]。滑轮和壳体之间可能发生滑动,以及壳体和介质之间滑动。通过调节弹簧加载系统和内部机器人之间的张力,可以最小化滑轮和外壳之间的滑动问题,但更紧密的配合意味着整个机器人的摩擦力更高。此外,IDU系统不能利用存储的动力:如果车轮停止,机器人将表现不正常。沿着小斜坡行驶的IDU系统必须使用动力来保持其车轮旋转以便移动:无法在没有帮助的情况下滚下小斜坡。另一方面,在没有内部机制控制力的情况下滚下陡峭的斜坡将导致不可预测的运动。从设计角度来看,IDU系统也必须非常平衡。偏轴重心可能导致机器人以不理想的方式运行。
2.2.3 万向轮
另一种结合了重心偏移原理的设计是BHQ-3 [11]。BHQ系列机器人的名字来源于他们的动力学模型是由Boltzmann-Hamel方程建立的。这个设计是仓鼠轮子和以前的IDU设计的组合。它可以概念化为一个万向轮系统:内部驱动机构可以在机器人内部由于附着的轮子的组合而自由旋转。BHQ-3中的IDU被设计成当遇到颠簸的地形时,内部机构不会移位(图4)。两个直流驱动电机控制机器人:一个电机控制IDU的方向,一个电机控制驱动轮的速度。这允许球以零转弯半径运动,创造比先前描述的机器人更高程度的全向性。机器人的速度除了能够通过使用重心偏移来操纵自身之外,还由驱动轮的角速度来控制。随着车轮旋转更快,机器人的平移速度增加。这意味着IDU的内部重量不是控制机器人动量的唯一因素。这个特定的机器人能够在水中,沙子以及小的坡度上行进。但是,根据所使用的电机和控制方法的不同,由于海绵轮的摩擦以及无法在斜坡上滚动的功能,可能会产生较高的能量损失。
图4 BHQ-3的结构:
1-马达,2-马达,3-海绵轮[11]。
HIT球形机器人[12]被设计为转向和驱动机构彼此独立的运行方式(图5)。 在基于钟摆的设计中,转向和转向机构彼此依赖,从而创建一个全向运动的机器人。 为了使机器人能够在任何方向上移动而不管方位(holonomy),转向和驱动机构必须是独立的。HIT仅由两个电机控制:一个转向电机和一个驱动电机。 旋转马达(物体1,图4)沿着赤道的边缘旋转机器人的整个内部组件,驱动马达(物体2,图4)移动机器人的重心,使其移动。
图5. HIT的图片及其内部驱动机制[12]。
2.2.4 钟摆驱动
工业界和学术界使用的流行设计是钟摆驱动设计(图6)。钟摆模型由一个穿过机器人外壳中心的固定轴组成,摆锤和摆锤围绕轴旋转。旋转摆锤将质心移出中心,壳体开始滚动。沿着赤道向左或向右移动摆锤会使质心向左或向右移动,机器人将开始向相应的方向转动。下面的图6显示了商业化摆锤机器人Rotundus的照片。
图6 一个商业化的钟摆驱动的机器人,Rotundus [13]。
随着摆锤的重量增加,可以用于驱动机器人的扭矩的值也增加。然而,更重的配重意味着更重的机器人。这种设计最显著的缺点是它无法爬上一个陡峭的斜坡。如果配重是系统大部分重量的地方,机器人可以爬上一个陡峭的斜坡。然而,实际上,一个设计良好的球形机器人通常只能上升30°的坡度[14]。可以穿过大于30°的斜面的球形机器人可能需要的设计技术在商业上或经济上不具有实用性。虽然摆动驱动装置存在一些限制,但它是一种低功耗易于实现的设计,可使外壳密封。Rotundus可以以6英里/小时的速度在雪,冰,泥和沙子上滚动,并且可以漂浮。另外,它可以承载1.81公斤的有效载荷[13]。
这种设计的一个缺点是,壳体的运动不具全向性:转弯的半径会影响他的运动性能。像所有其他重心偏移设计一样,质心不能移到壳体的边界之外。考虑到随着壳体的半径变大和摆锤变得更大,输出转矩增加也是重要的。然而,随着这些物体变大,移动它们所需的能量也变得更大。考虑到材料成分和内部元件的物理尺寸时,设计有一个微妙的平衡。
图7. Roball转向机构的后视图[15]。
Roball [15]被设计成了孩子的玩具,是一个基于钟摆的球形机器人,增加了一个倾斜机构,允许它转动,如图7所示。机器人被设计成在不受限制的环境下工作,并且成本和复杂性最小化。机载传感器允许机器人自主导航。所有元素都放在机器人(赤道)的平面上,并使用配重完成转向。在这个特定的模型中,配重是一个电池。在这种设计中,配重被设计成停留在壳体的底部,壳体在其周围移动,从而推动机器人运动。在前面的例子中,内部质量被设计成在壳内移动,并且机器人滚动到平衡。
2.2.5 双摆
最近文献中提出的另一个新颖的概念是内部具有两个摆锤的驱动系统。B.赵提出这样一种椭圆形的装置。配有双摆,这使得机器人能即使转弯[16,17]。如速度和最大倾斜度等参数在本设计中未被优化,因为研究主要集中在概念验证和路径规划。弹簧被添加到系统中,以抑制在穿越崎岖地形或大颠簸时对内部机构的影响。文献提出的理论通过了模拟验证,然后展示了概念证明物理原型(图8)。
图8. Zhao设计的双摆机器人的机械结构:
(1)电机A; (2)电机B; (3)配重B; (4)配重A; (5)弹簧; (6)直线轴承; (7)导杆; (8)外壳[16,17]。
机器人可以通过使用“粘-滑”原理即使转弯。在第一阶段(粘),每个摆缓慢旋转到水平位置,但方向相反。这会引起平衡的变化,机器人会转动,但是由于钟摆缓慢地旋转,平衡的变化不足以克服固定机器人的静摩擦力。在下一个阶段(滑),摆锤很快被迫下降到原来的垂直方向。这也会引起平衡的变化,但是快速移动足以克服引起机器人滑动和转动的静摩擦力。
另一种类型的双摆设计是在KisbotII中看到的。它的前身KisbotI,一个基于一个单摆设计,并具有适应性腿,可以爬上楼梯(下面讨论)。KisbotII通过允许内部机构围绕垂直于摆动轴线的轴线旋转来克服粘滑原理的使用需求[18]。 KisbotII的旋转轴如下图所示。
图9。KisbotII摆的旋转轴。
(a)侧视图(b)前视图[18]。
KisbotII的侧视图如图9(a)所示,前视图如图9(b)所示。侧视图显示了摆锤围绕机器人直径在任一方向上相互独立旋转的能力。从理论上说,赵先生描述的粘滑原理也可以用来把机器人转到位置。但是,通过增加图9(b)所示的额外自由度,钟摆可以从左到右以及从前到后旋转KisbotII,从而不需要粘滑原理。
图10. Spherobot的图片及其转移重心的系统[19]。
有些团队已经为重心偏移设计设想了另一种方法。通过将大量材料放置在机器人的中心,减少了旋转球体所需的能量。长轴将中心质块连接到外壳,并且重物被设计成横穿这些长轴,如图10所示。通过顺着长杆上下移动重物
全文共19522字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11227],资料为PDF文档或Word文档,PDF文档可免费转换为Word

