Chinese
Journal of
Aeronautics
Chinese Journal of Aeronautics 22(2009) 105-112 www.elsevier.com/locate/cja
Adaptive Impedance-controlled Manipulator Based on Collision Detection
Huang Jianbina,*, Xie Zongwua, Jin Minghea, Jiang Zainana, Liu Honga,b
aState Key Laboratory of Robotics and System, Harbin Institute of Technology, 150001 Harbin, China bInstitute of Robotics and Mechatronics, German Aerospace Center, 82230 Wessling, Germany Received 11 March 2008; accepted 13 May 2008
Abstract
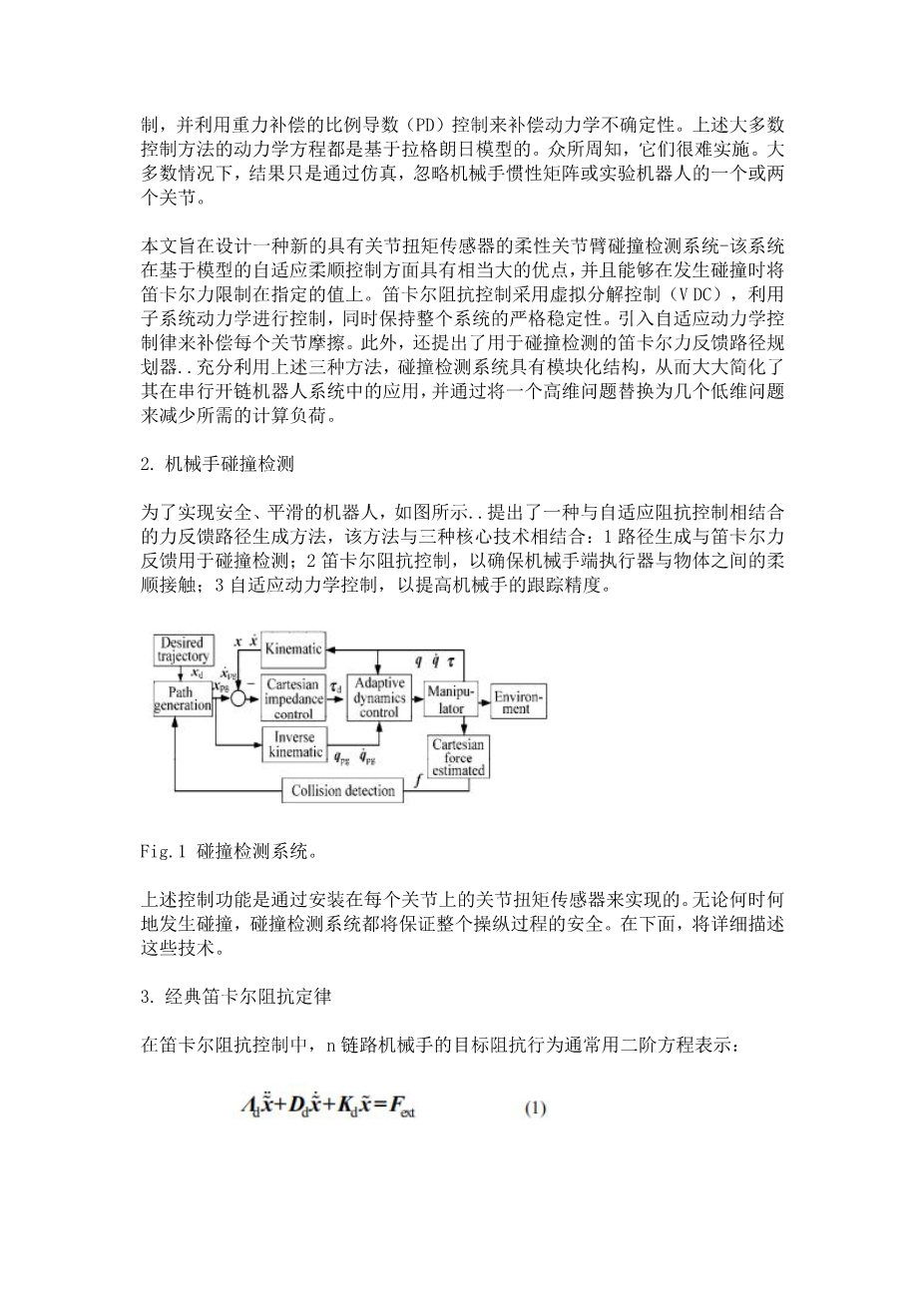
This article provides a flexible-joint-manipulator, which incorporates with three means to make its mechanical arm come into compliant contact with the objects with a force kept within an acceptable range. At first, the Cartesian impedance control law is introduced on the basis of virtual decomposition to realize the compliance control. Then, adaptive dynamic joint compensators on all joints are used to achieve more precise control. Finally, a Cartesian force-feedback path generation is developed for collision detection and force control. Experiments are performed on a 4-degree of freedom (DOF) satellite on-orbit self-servicing (SOOSS) manipulator. The results of the trajectory tracking and collision experiments demonstrate the effectiveness and feasibility of the proposed method.
Keywords: flexible manipulators; impedance control; collision avoidance; adaptive control systems; trajectories; safety systems
Introduction
The development of robotics has aroused peoplersquo;s ev- er-growing interest in dexterous robots destined for uses in space, medical treatments, and hazardous environment. A key problem the robots are facing is their ability to prevent themselves from collision accidents when performing mani- pulation in an unstructured environment[1-3]. To ensure the robot to work safely, it should be capable of carrying out compliant interaction with objects, detecting the possibility of collision and controlling the contact forces[4].
Safety-oriented design of the manipulator can be classified into two categories. One is the mechanical design including the reduction of inertia and weight and the introduction of compliant components such as the visco-elastic material cover, flexible joint, compliant shoulders, mechanical im- pedance adjusters, and visco-elastic passive trunks[5]. The contact force might also sharply increase to the point that it becomes too large not to induce collision even when the flexible mechanism has been used. Furthermore, highly flexible hardware design out of safety concern might cause decrease in precision and fast response of the end- effectors. The other is to introduce sensitive torque sensors for real-time detection of the forces imposed on the robot and control the interaction between the end-effectors of the ma- nipulator and the environment[6-7]. Y. Yamada, et al.[8] pro-
*Corresponding author. Tel.: 86-451-86412042.
E-mail address: huang.jian_bin@yahoo.com.cn
Foundation items: National Natural Science Foundation of China (60675054); National High Technology Research and Development Program of China (2006AA04Z228); “111” Project (B07018)
1000-9361/$ - see front matter copy; 2009 Elsevier Ltd. All rights reserved. doi: 10.1016/S1000-9361(08)60075-8
posed collision detection schemes based on the comparison of the actual motor torques to the reference torques calcu- lated from a dynamic model of the manipulator. However, the schemes fail to exhibit the compliant contact between the end-effectors of the manipulator and objects with ignorance of uncertainties of the dynamic parameters of the manipula- tor.
Cartesian impedance control is one of the most intuitive approaches of interaction control, which provides a unified framework for achieving compliant behavior when robot interacts with unknown environment. It was extensively theorized by N. Hogan[9] and put in experimental application by H. Kazerooni, et al[10]. S. A. Schneider, et al.[11] developed an object impedance control for cooperative manipulation. J.
J. Gonzalez, et al.[12] introduced a hybrid impedance control scheme that utilized a desired force as the commanded vari- able and demonstrated the improved performances of an explicit force control structure with a similar degree of ro- bustness. S. Morinaga, et al.[13] proposed a nonlinear imped- ance control for the collision detection system and used adaptive law to estimate the dynamic parameters of the ma- nipulator. Additionally, A. Albu-Schauml;ffer, et al.[14] investi- gated a Cartesian impedance control of the German Aero- space Center light-weight arms with completely static state feedbacks and used proportional derivative (PD) control with gravity compensation to compensate the dynamics uncer- tainties. The dynamic equations in most of above control methods were based on the Lagrangian models. It was well known that they were very difficult to implement. Mostly, results were obtained only through simulations, disregarding manipulator inertia matrix or experiment on robot of one or two joints.
The article is meant to devise a new collision detection system with joint torque sensors for flexible joint manipula-
- 106 · Huang Jianbin et al. /Chinese Journal of Aeronautics 22(2009) 105-112 No.1
tors. The system has considerable merit in model-based adaptive compliant control and ability to restrict the Carte- sian force to the specified value when collision occurs. The virtual decomposition control (VDC) is adopted in the Carte- sian impe
剩余内容已隐藏,支付完成后下载完整资料
英语译文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[423991],资料为PDF文档或Word文档,PDF文档可免费转换为Word

