英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
多指灵巧操作夹持器的研制
Marwene Nefzi, Martin Riedel, Burkhard Corves
亚琛大学机械理论与动力学系
文摘:提出了一种类型的多指手爪,它能通过精准地驱动六个手指关节来完成对六自由度物体的夹持操作。抓取后,通过电磁铁或真空杯等提供的附着力,确定了指尖与待操纵的物体保持准确的连接。由此来形成的闭环机构,由夹持器和物体形成,具有相似于并联机械手的运动结构。这种夹持器相对于现有应用的工业夹持器具有大量优点,一般用于简单的夹持任务,以及现有的机械手,具有复杂且昂贵的控制结构。版权所有copy;2006 IFAC
关键词:工业手爪,机械手,灵巧操作,多指手,二次抓取
- 简介
工业夹持器一般会被设计成执行简便的夹持任务。当连接上机械操纵器时,这些抓取器可用于抓取、提升和操纵物体。然而,使用这种夹持系统在多功能性和灵巧性方面功能有限。事实上,在自动化装置中的大部分工业夹持器必须根据工件和任务而做出改变。为了完成灵巧而精细的操作,即在夹持器的工作空间范围将物体的位置和方向从给定的配置改变为不同的配置,开发了各种类型的多指手。现有的机械手一般会被设计成模仿人手的灵巧性和抓握行为。先前设计包括冈田(Okada,1982)、索尔兹伯里手(Salisbury and Roth,1983)、犹他-麻省理工学院手(Jacobsen et al.,1986)、巴雷特手(Townsend,2000)、DLR手(Butterfass et al.,1999)或博洛尼亚大学手(Melchiorri and Vassura,1992)设计的多指手。已经作出了重大贡献,以找到足够简单的设计来构建和控制,见(Bicchi,2000年)。然而,机械手的结构合成研究相对于其他研究较少。Lee和Tsai开发了一个多指手可行的运动学结构图集,其自由度度在3到6之间,见(Lee和Tsai,2002)。尽管这样,在现有机械手那里进行的结构综合与并联机器人的结构综合相似联机械手之间存在根本区分,如李和Tsai,2002所指出的。事实上,机械手抓住的物体处在力封闭状态,而并联机械手的平台却处于形式封闭状态,见(Reuleaux,1963;Bicchi,1995)。
一般情况下,六自由度并联机器人可以经过驱动六个关节完成运动平台的任意位置和方向(Stewart,1965)。另一方面,梅森和索尔兹伯里也证明,完成广泛操纵的机械手的最小理论控制自由度,即执行器的数量是9(梅森和索尔兹伯里,1985)。事实上,在笛卡尔三维空间坐标系中,三个手指是完全约束物体的一个必要条件。此外,手指必定用指尖跟踪物体上相应接触点的轨迹,而这是在三维空间中移动的。因此,每个手指三个执行器都是严格必要的。更准确地说,操纵虽然完成,而手指必须不断地对物体施加力,来产生锥形摩擦约束,因此不释放它。因此,操作需要辅助执行器来主动控制手指和被抓物体之间的接触力。此外,为了确定灵巧操作的适当手指力,需要适当的控制结构和感觉系统,见(Liu和Le,2003)。Yoshikawa提出了一种有效的控制方法,将指尖力分为抓取力和操纵力,分别进行控制,见(Yoshikawa和Nagai,1991)。中村和山崎发展了一种基于反应行为积分理论的控制方法(中村和山崎,1997)。现有的机械手大多采用力合力的概念,并存在一些缺点,例如复杂的控制结构,因为执行精细任务所需的致动器和传感器的数量很多。力封闭下物体的灵巧操作的复杂性促使我们重新思考这种方法。受并联机器人运动学结构的启示,我们提出了一种手爪,它的手指能够将其远端去相连到被操纵的物体上。与现有的机械手存在不同,手指与被抓握的物体之间的连接所施加的约束不是摩擦约束,而是其他约束。经过电磁铁或真空杯提供的附着力,确保指尖和物体保持连接。这些连接还具有传递力、扭矩或两者的能力。由此产生的夹持器对象系统是一个类似于平行运动结构的闭环机构。在这种情况下,改变物体姿态(位置和方向)所需的执行器数量等同于夹持器物体系统的自由度。这将有利于抓取器的控制。因此,用这样的夹持器操作比用工业夹或现有机械手操作更为简易。首先,我们提出基本的思想。然后,我们将确定适当的手指数量、执行器数量以及手指与被抓物体之间的接触自由度。在第四部分中,我们将研究手指机构的结构合成。最后,我们将讨论夹具的尺寸问题。
- 基本思想
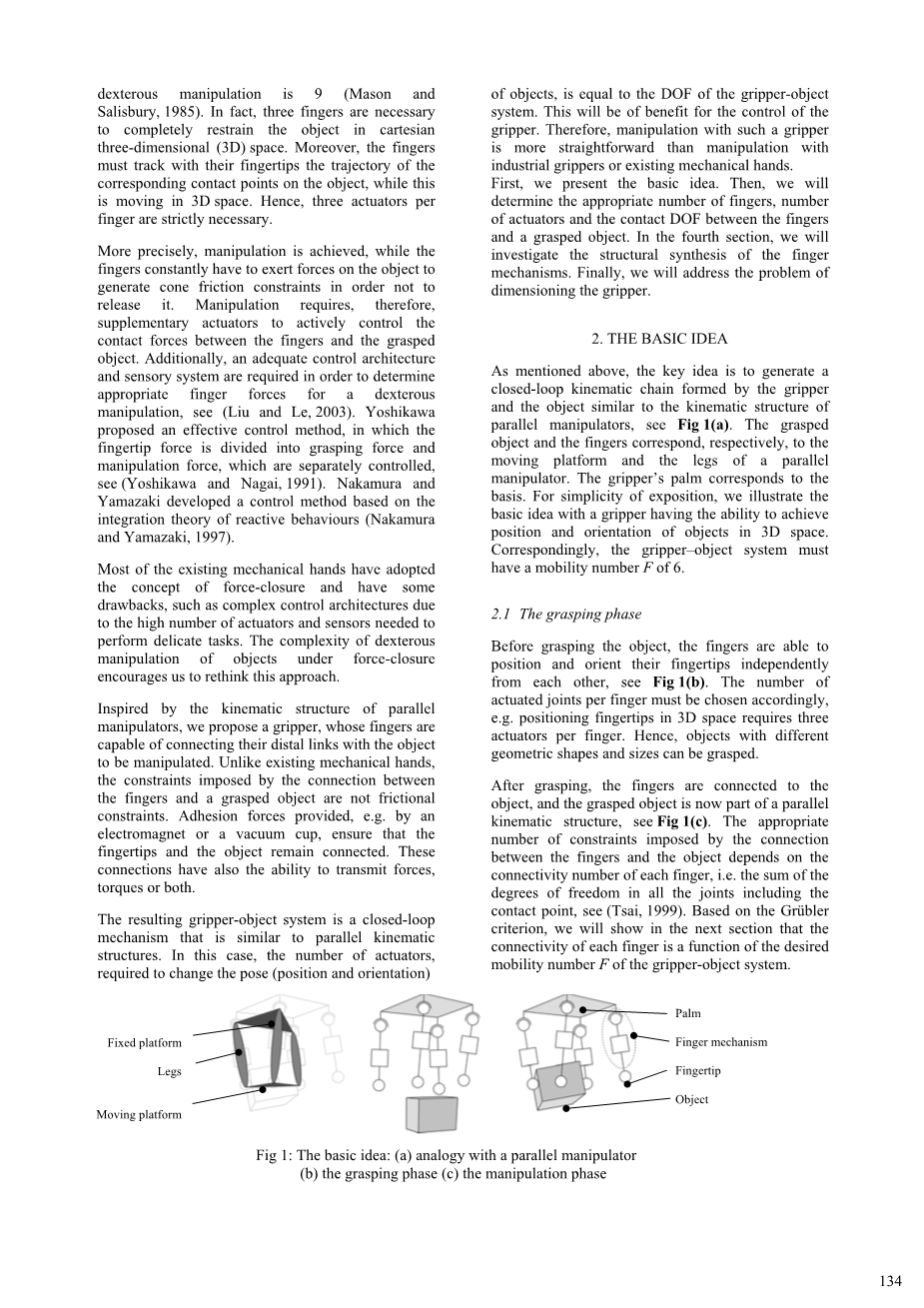
如上所述,关键思想是生成由夹持器和相似于并联机器人运动结构的物体形成的闭环运动链,见图1(a)。被抓取的物体和手指分别相应于并联机械手的移动平台和腿。手指的手掌与基部相对应。为了简化说明,我们用一个能够完成物体在三维空间中的位置和方向的夹具来说明这个基本思想。相应地,夹持器-物体系统的移动数F必须为6。
图1:基本思想:(a)与并联机械手的类比 (b) 抓取阶段(c)操作阶段
2.1抓取阶段
在进行抓住物体之前,手指能够彼此独立地定位和定向在其指尖,见图1(b)。必须相应地选择每个手指的驱动关节数.在三维空间中定位指尖需要每个手指三个执行器。因此,可以抓住不相同几何形状和尺寸的物体。抓取后,手指与物体相连,被抓取的物体成为了平行运动结构的一部分,见图1(c)。手指和物体之间的相连所施加的适当数量的约束取决于每个手指的连接数,就是包括接触点在内的所有关节的自由度之和,见(Tsai,1999)。基于Gruuml;bler准则,我们将在下一节中说明,每个手指的连接性是所需的夹持器对象系统的移动数F的函数。
2.2操纵阶段
显然,夹持器对象系统可以通过精确驱动F关节来控制。其余关节位置由驱动关节所施加的约束来决定,并且对于指定的目标位置和方向,我们可以用求解逆运动学问题来计算执行器的位置。 现有机械手的手指只可以在接触点推动但不能拉动物体,而所建议的夹持器的手指附着在物体上还需要具有传递力、力矩或两者的能力。因此,不需要辅助执行器来控制手指和物体之间的接触力。需要注意的是,在抓取之前,执行器的数量可能会跟操作阶段执行器的数量不一样。例如,在抓取阶段之前,一只三指手的各个手指有三个执行器,但是当手指抓取和进行操作时,每个手指只有两个执行器。其余的执行器会断开。
2.3再抓取阶段
多指手的一个关键优点是它可以重新抓取物体,例如当需要大的旋转角度时。我们将在下一节中显示,增加或减少手指中不会影响夹持器对象系统的移动数,因此使用所提议的夹持器重新夹持也是可能的。
- 概念设计
在进行结构综合之前,我们应该构思一个概念来完成所提出的思想。这其中包括确定手指的数量、执行器的数量以及手指与被抓物体之间的接触自由度。
3.1Gruuml;bler原则
设n为连杆数,g为关节数,fi为关节i允许的相对运动度,fid为夹持器对象系统中的被动自由度,lambda;为所考虑空间的自由度。根据Gruuml;bler准则,夹持器对象系统F的自由度值由下式给出:
F (n 1) g fi fid (1)
用一个独特的关节替换每个手指Fj-DOF,我们可以获得一个由两个连杆(一个被抓取的物体和抓取者的手掌)和k个关节组成的理论机构,其中k表示手指的数量。公式(1)现在可以写成:
F=Fj k (2)
因为所有手指都有相同的结构拓扑,我们可以写,
Fj=k Fj (3)
利用式(2),我们得到连接数Fj:
Fj=(F- k ) (4)
将F=6和lambda;=6代入式(4),得到:
Fj=6 ( 5)
式(5)规定,无论手指的数量如何,每个手指的连接数必须等于6。
3.2手指数量
我们区分与被操纵物体接触的活动手指和与被操纵物体不接触的静止手指,它们可用于重新抓取。如第2节所示,仅需6个执行器即可在三维空间中完成对物体的操纵。因此,与物体接触的手指的最大数目不应超过六。然而,使用六个手指会导致一个非常复杂的夹持器,有超过18个执行器。出于经济性的考虑,手指还应具有相同的结构拓扑,即手指与物体的接触自由度、关节数和执行器数。因此,不考虑具有四个和五个活动手指的夹持器,因为不可能完成执行器的均匀分布。此外,有更多的休息手指比活动手指是不够的。
表1显示了三个活动手指和三个静止手指的所有可行组合,其中p表示每个手指操作所需的执行器数量,q表示每个手指抓取的辅助执行器数量,r表示执行器总数。只有一个活动手指的夹持器功能有限,例如无法提供灵巧和动态操作。本文选择了3个活动手指和1个静止手指的组合。
|
1个测试手指 2个测试手指 3个测试手指 |
|
1个活动手指 p = 6; q = 0;r = 12 |
|
2个活动手指 p=3 ;q=0;r=9 p=3;q=0;r=12 |
|
3个活动手指 p=2 ;q=1;r=12 p=2 ;q=1;r=15 p=2 ;q=1;r=18 |
表1:活动手指和休息手指的可行组合
3.3手指中的执行器数量
每个手指应该有三个执行器,以定位其指尖在三维空间,然后抓住对象。实际上,定位和定位指尖需要一个有6个执行器的机构。然而,这一概念将是成本密集型的,不包括在内。第一个概念可以通过使用被动关节来完成,通过接触物体的形状来完成指尖的机械适应。每个手指和物体的接触自由度,i、 e.指尖的自由度应为三,因为每个手指机构应具有三个受控关节。抓住物体后,每个手指中的一个执行器必须断开或被动移动。
3.4概述
简而言之,在手指机构的结构综合和设计之前必须考虑的约束条件有:
- 操作只需要六个执行器
- 每个手指的连接数等于6
- 三根手指同时与物体接触
- 一根手指可以用来重新抓取
- 每个手指需要三个受控关节来定位指尖
- 手指与物体的接触自由度为3。
- 结构合成
每个手指的运动结构应满足第3.4节规定的条件。结构综合包括三自由度手指机构的生成。为此,我们将手指机构按其拓扑结构分为三类:开环运动链手指、闭环运动链手指和混合运动链手指。由于每组可行运动结构的数目较多,我们定义了额外的约束来预先选择候选结构。最后,根据加权评价准则对候选结构进行赋值,选出最有前途的运动结构,即得分最高的结构。
4.1开环运动链
在现有机械手中最常见的手指拓扑是串联的。图2描绘了具有三个驱动关节(a)的满足第3.4节中施加的条件的串联运动链。每个链路都通过一条且仅通过一条路径连接到每个其他链路。每个执行器可以是旋转的或棱柱形的。
图2:具有三个驱动关节的开环运动链
4.2闭环运动链
闭环运动链具有高刚度、高精度的特点。然而,它们导致了9个关节和3个肢体的非常复杂的手指机制。图3描绘了最有希望的运动结构,这些结构满足第3节中施加的条件以及与关节的类型、数量和排列有关的附加条件。三个执行器用箭头突出显示。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238158],资料为PDF文档或Word文档,PDF文档可免费转换为Word

