英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
刚柔机械臂的动态耦合研究
刘志华,唐晓强,王立平
清华大学机械工程系摩擦学国家重点实验室,中国,北京100084
|
文献信息 文章历史: 2014年6月5日 收到修订后的表格 2014年9月14日至2014年10月8日 关键词: 应用刚柔机械手 动态耦合 反馈控制 先进 |
摘要 为解决500米口径球面射电望远镜的进给支撑问题,设计了刚柔机械臂。刚柔机械手由柔性索驱动的并联机械手和刚性斯图尔特平台组成。由于反作用力的作用,斯图尔特平台的运动可能会引起钢丝绳驱动的并联机械手的振动。本研究的目的在于探讨刚柔性机械臂的动态耦合问题。引入虚拟斯图尔特平台,得到一个齐次矩阵进行描述。 amp; 2014爱思唯尔有限公司保留所有权利。 |
1.介绍
1994年,中国天文学家进行了500米口径球面射电望远镜(FAST)[1]的概念设计。针对望远镜尺寸较大的特点,设计了刚柔机械臂作为支撑系统。柔性电缆驱动的并联机械手为接收机提供了广泛的平移和旋转的空间[2]。然而,由于大跨度电缆的柔性,支撑系统在露天[3]下可能会受到风扰动而产生振动。然后用刚性Stewart平台来补偿定位误差,以达到所需的精度。
然而,刚性机构的补偿控制是具有挑战性的,特别是当平台的质量和惯性相比基地来说不能被忽略。平台运动是由动力相互作用引起的基础运动。此外,基础运动将改变平台的原始轨迹。这种动力耦合是除了风扰动外引起的刚柔机械臂振动的另一个原因。而FAST的研究主要集中在振动悬架[4-8]、尺寸优化[9]和工作空间分析[10,11]。在刚-柔性机械臂的动力学耦合问题上研究较少。这也是本文研究的出发点。
对自由漂浮机器人的动态耦合问题进行了研究是了解系统的动态耦合是第一步。杜博斯基和托雷斯[12]引入扰动映射,将机器人关节运动与基态扰动联系起来。徐[13,14]定义了一种度量方式来表征动态耦合的程度。定义的测量方式描述了一个给定的机器人末端执行器的运动会产生多少基础运动。为了实现对基底的零反应,黄平等人提出了动平衡控制[15,16]。在动态平衡控制中,设计了一种由两臂组成的空间机器人系统,以完成捕获任务的机械臂为基础,利用平衡臂来补偿对基地的干扰。为使空间机器人的动态干扰最小化,人们提出了空间机器人的路径规划方法。杜博斯基和托雷斯[12]利用增强扰动图找到了最小化动态扰动的路径。黄平等人使用遗传算法搜索最优的节点间参数,以实现干扰最小。成等人提出了一种新的空间机械手步态设计,以减少对空间站的动态干扰。上述方法对于自由漂浮机器人在刚柔机械臂上的应用具有一定的优点。然而,定义的度量[13,14]不适用于具有平移和旋转自由度的基座或末端执行器,因为速度向量的维数不是均匀的。因此,有必要提出一个具有齐次维数的动态耦合指标。
动态耦合对刚柔机械臂的控制性能有很大的影响。宏/微机器人的控制方案包括利用刚性机器人主动补偿微机器人的位置误差,采用微型机械手来降低振动等。Torres等人[19,20]采用能量耗散法,通过把机器人的执行器用来充当无源线性弹簧和阻尼器来最大限度地耗散能量。乔治[21、22]研制了惯性阻尼控制器,通过调节机械臂执行器的基本振动来感应惯性阻尼力。上述控制方案有能力抑制了宏观机械手的高频振动,降低了大跨度索驱动并联机械手的低频振动。本文提出的刚柔性机械手的主要目标是实现定位和定位精度。提出的控制器主要基于预测[23]和反馈[6]两个因素。预测处理的是由风扰动引起的基础运动,反馈的目的是建立一个闭环系统以达到控制精度。Duan等人提出了一种解耦跟踪预测算法来预测基的位置和方向,并设计了上层自适应交互PID监控控制器。Ren等人[4,24]以预测的基座惯性运动为参考输入,建立了6个执行器的PD控制律。在刚柔性机械臂的控制中,由平台运动产生的基座运动是不可取的,应限制在一定的范围内。如果动态耦合足够大,可能会导致控制系统的预测失效和不稳定,造成刚-柔性机械手的剧烈振动,甚至变得无法控制。因此,有必要对动态耦合对控制性能的影响进行研究。
本文组织如下:第二部分:对刚柔机械手系统进行了详细的描述。第三部分:建立刚柔机械臂的动力学模型。第四部分:提出了基于“虚拟Stewart平台”的概念。第五部分:讨论了动态耦合对动态性能的影响。第六部分:分析了动态耦合的影响因素,包括结构形式、结构参数和惯性特性。最后,给出本文的结论。
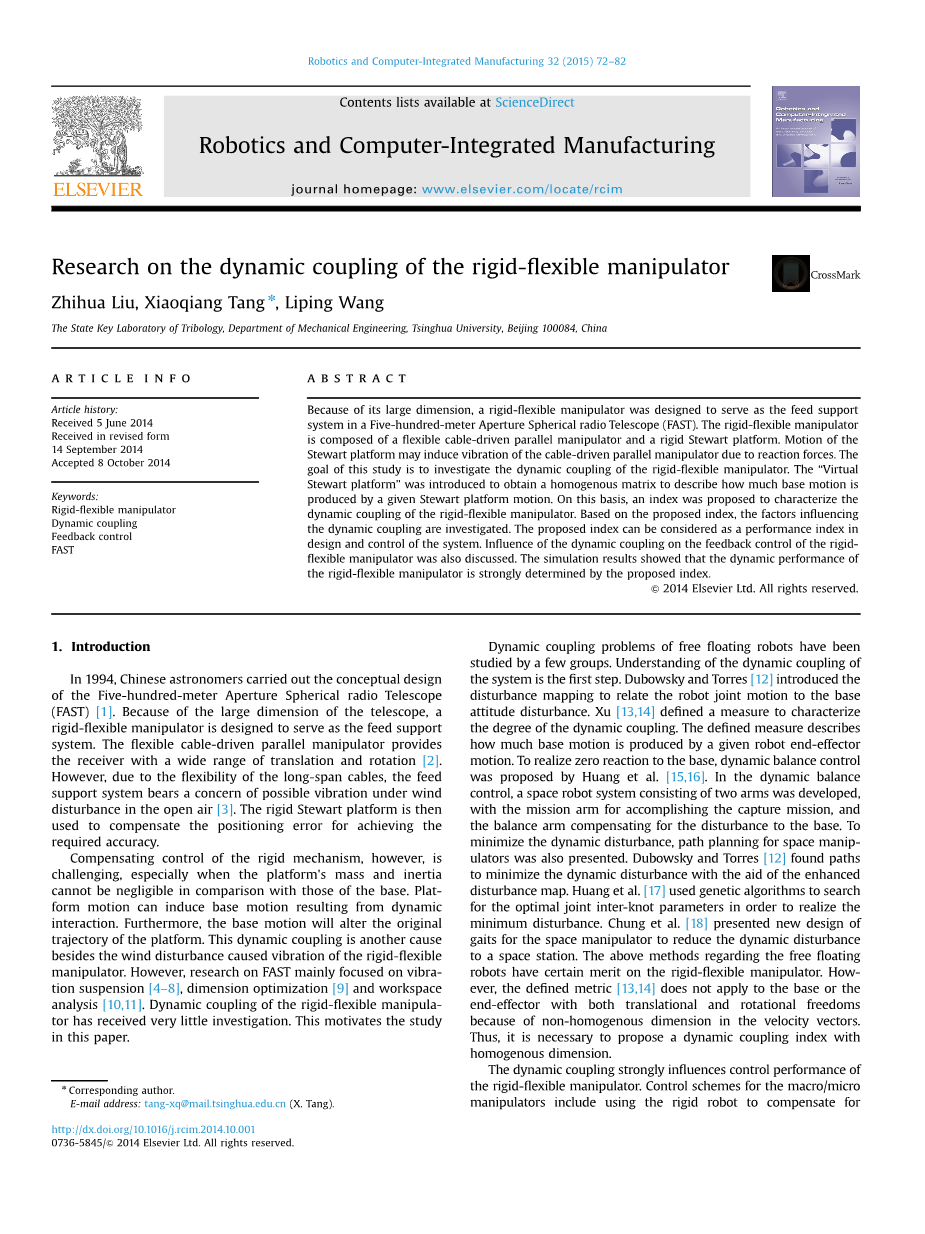
图1所示。快速三维模型:(a)等距视图,(b)进给支撑系统。
2. 系统描述
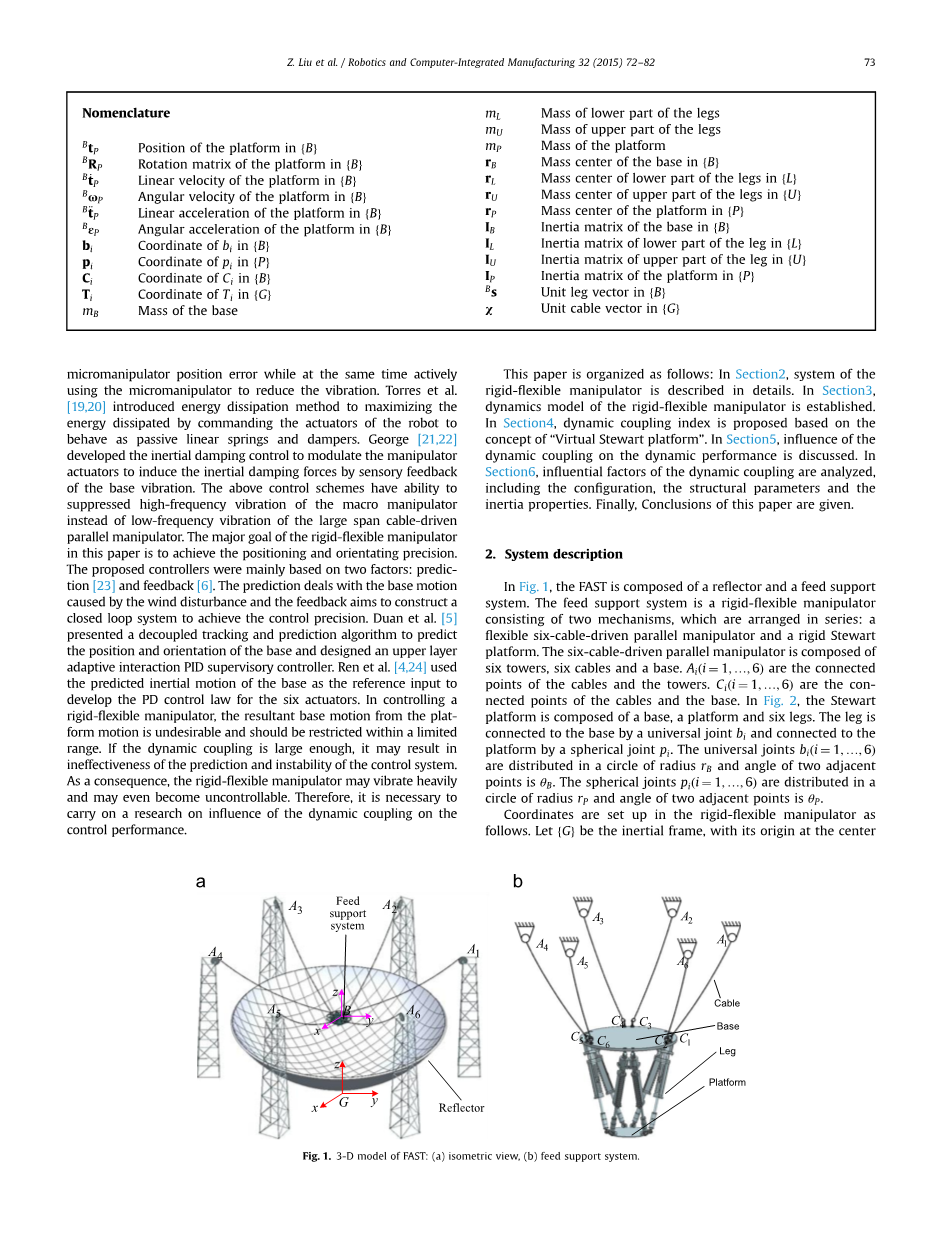
在图1中,FAST由反射器和馈电支撑系统组成。进给支撑系统是由柔性六索并联机构和刚性Stewart平台两部分串联构成的刚柔两种机构。六索并联机械手由六座塔、六根索和一个底座组成。Ai(1,hellip;hellip;,6)0有联系电缆,位于塔的尖端。C i(1,hellip;hellip;,6)是电缆与底座的连接点。Stewart平台由底座、平台和六条支撑组成。支撑通过万向节bi连接到底座上,并与底座相连平台由一个球面关节pi构成。我的万向节bi(1,hellip;hellip;,6)分布在一个半径为 rB的圆的两个夹角theta;B的相邻角点。球形关节pi(1,hellip;hellip;,6)分布在一个半径rP的圆的两个夹角theta;P的相邻角点。
图2所示。斯图尔特平台:(a)等距视图,(b)俯视图。
球形接头
刚柔机械手的坐标设置如下:让{G}成为惯性坐标系,它的起源在各种Ai(1,hellip;hellip;,6)的中点,y轴穿过A1A6的中点,z轴与重力方向相反。设{B}为基架,原点在基架几何中心,y轴穿过b2b3的中点,z轴垂直于基台平面。坐标系{L}与bi相连,x轴沿支撑方向,y轴沿万向节固定轴。帧{U}与pi相连,并与{L}平行。设{P}为平台框架,原点在平台几何中心,y轴穿过p2p3的中点,z轴垂直于平台平面。本文中使用的符号列在命名法中,并在第一次出现的地方进行了描述。
图3所示。电缆的动力学。
3.动力学
基础质心、支撑下部、支撑上部、平台的线性加速度如下:
和线性加速度,取向,角速度,角加速度G的基地;分别为位置向量、线速度、直线加速度; 分别为位置向量、线速度、直线加速度; 分别为位置向量、线速度、加速度。
可以给出支撑和平台的角速度
支撑和{B}平台的角速度为BW和Bomega;P。
同样,支撑和平台的角加速度也可以给定:
BE和BεP为支撑和{B}的平台的角加速度
如图3所示,假设所有的电缆都在受拉状态下进行拉伸,并在其线性弹性范围内发生偏转,我们将电缆建模为弹簧阻尼器[3,25]。作用在基础上的索力可以用索的弹性变形和滑动速度来计算。
ℓ电缆长度,ℓ0是最初的电缆长度,ℓ是滑动速度;k是弹性系数,c是阻尼系数。
根据牛顿-欧拉方法,得到刚柔机械臂的动力学方程为:
在上面的方程中,We是外力和力矩;JC、M、m、wg的详细表达式列于附录A。
4. 动态耦合指数
接下来,我们提出了一个测量指标来表征动态耦合。由于动力耦合描述了Stewart平台各部分之间的相互作用,故在分析中不考虑重力、缆索力和外界干扰,式(10)可表示为:
对式(11)积分,假设初始条件为零,得到
式(13)描述了平台速度与基座速度之间的关系。但由于速度矢量中的元素在维数上不是均匀的,因此利用上述方程来测量动力耦合是不可行的。所以,引入“虚拟Stewart平台”来建立具有齐次维数的方程。如图4中所示,假定一个虚拟基础安装在惯性坐标系,虚拟联合o扩展线的实际支撑,虚拟支撑B连接虚拟联合o和万向节B、P和虚拟支撑连接虚拟关节o和球形关节P。
在任何给定时间,实际的支撑都可以用虚拟支撑B和虚拟支撑P表示
根据[26]中的推导,利用Jacabian矩阵可以得到实际支撑和虚拟支撑B的滑动速度矢量
其中J和JB的详细表达式列于附录a。将式(15)和式(16)代入式(13),可得
然后,速度大小的比值由下式
这个关系描述了一个给定的平台运动会产生多少基础运动。可根据关系列出一个特征值问题的矩阵(JBM-1mj-1)T(JBM-1mj-1)如果支撑的滑动速度是单位向量,虚拟支撑的滑动速度在有界椭球内扩大了JBM-1mj-1,即椭球的轴由其奇异值决定。因此,定义最大奇异值,sigma;max(JBM-1mj-1)是合理的,即开动态耦合指数(DCI),因为它代表了基地运动引起的最大动态耦合。
5. 动态性能
由于动力相互作用,平台的运动可以改变基座的运动轨迹。这使刚-柔性机械手的控制具有一定的挑战性,特别是当平台的质量和惯性与基座相比不能忽略时。如果动态耦合足够大,控制系统可能会导致动态性能差甚至不稳定。因此,接下来我们分析了DCI对控制系统的影响。
5.1。线性反馈控制
如前所述,反馈是控制刚柔机械臂的有效方法。图5为刚柔机械臂反馈控制流程图。平台GtP的期望轨迹;GRP是参考输入。根据基础平台GtB的姿态反馈,确定6条支撑的指令动作li。 根据刚柔机械手逆运动学,给出THORN;平台的期望轨迹GRP THORN;。
拉普拉斯变换方法是分析线性控制系统的一种有效方法。为了得到控制系统的传递函数并建立刚柔机械臂的线性化动力学模型。对式(10)两边关于给定工作点进行细微变化,我们得到:
如果我们假设机械系统处于平衡状态,这样M=0, m=0。为了方便起见,我们忽视delta;M,delta;m,delta;M_,delta;m_,delta;wg,delta;JTC, 的变化,用式(9)代入式(19),得到线性化动力学方程:
将Eq.(15)和Eq.(16)的结果代入,可将Eq.(20)写成下式。
对式(22)作拉普拉斯变换,考虑式(14)得到
基于式(23)、(24)刚柔机械臂的线性化反馈控制可以得到如下框图形式:在图6中,delta;LP为所需的平台的轨迹,delta;LB为反馈构成的基本表现,与一起构成支撑的位置控制的传递函数。
由图6可知,线性化反馈控制系统的传递函数为
由式(26)可知,矩阵JBM-1mj-1对极点和零点位置有重要影响。式(26)中的根为柔性机构的固有频率。如果JBM-1mj-1非常接近零矩阵,则N的零和极点由柔性机构的固有频率和支撑的控制回路的传递函数的零和极点组成。在这种情况下,动态耦合较弱,但是可以获得良好的动态性能。反之,刚柔机械臂的动态响应性能较差。。
接下来分析了DCI与稳定性的关系。简化的支撑部位置控制如图7所示,详细参数如表1所示。以作为状态变量,我们表达式(25)状态方程为
其中A和B的详细表达式列于附录A。
如果所有的特征值都在左半复平面上,即
DCI与特征值的最大实部的关系如图8所示。可以看出,随着DCI的增大,特征值越来越接近图像轴。当DCI大于0.35时,存在特征值位于右半复平面上。当控制系统出现发散时,DCI应小于0.35。
5.2。动态性能仿真
接下来,使用sim力学工具箱模拟了DCI对动态性能的影响。在sim力学中建立了如图5所示的刚柔机械臂反馈控制的仿真模型。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[236370],资料为PDF文档或Word文档,PDF文档可免费转换为Word

