
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
基于参数识别应用的动态称重系统
Shen Guoqiang,Yan Zujian
HANGZHOU DIANZI UNIVERCITY,Hangzhou,Zhejiang, 310018,China
ajian1453@163.com
摘要——在农业和畜牧业养殖过程中,对于牲畜私饲料的动态称重测量的需求不断上升,但动态称重比比静态称重更重要更复杂,并且要达到这种技术非常困难。对于提高设备的生产率和效率来说,高精度、高速度的动态称重算法的研究具有相当大的意义。这篇文章讨论了关于一般称重系统的问题,这种称重系统等价于一般二阶控制系统。文中通过控制原理导出了静态和动态的数学模型。然后通过拉普拉斯变换将它转换成自回归滑动平均模型。之后转变为最小二乘参数识别问题。最后,本文还分析了在称重过程应用中的最小二乘参数识别。
关键词——动态称重;二阶系统;最小二乘法;参数识别。
- 引言
在农业养殖的牲畜喂料过程中,随着科学技术的不断发展,新的技术也不断被应用。目前互联网技术不断推广,在物联网技术应用中,无线射频识别技术和自动测量技术对畜牧业自动称重提出了更高的要求。在畜牧业的养殖过程中,在动态称量方面有越来越多的问题产生。特别是在线饲养的动态称重方面,对其需求不断提升,因此,提高动态称重的速度以及精度已经迫在眉睫。动态称重有待解决的问题如下:被测量的目标通常处于一个非线性状态;动态称重系统是一个在线自动测量系统;短时间内的快速测量,需要系统有非常好的时间响应特性;在动态称量中,被测对象的重量是随时间改变的。附加机械系统是振动,此外,在给料时,物料对称重系统的冲击也是影响称量精度的因素。因此,解决动态称重问题的难度比静态称重更大。在物理观点看来,任何从一个状态到另一个状态变化的系统或对象都是过程的转变,在这个过程中,会产生一个特定的冲击。同样的原理,在动态称重系统中,当它接收一个对象,压力状态在外力作用下,会从一个状态转化为另一个状态,但通常也会经历一个渐变的过程。在这个过程中,测量值和实际称量值之间有很大的差别。如果这个较大差值在动态称重中没有被消除,那称重系统将达不到要求的精度。只有称重系统区域一个相对稳定的状态时,测量才能相对精准,如果从动态到静态是一个长时间的过渡,那么存在的称重系统将增加速度的限制。为此,它牺牲了一些系统精度,为了确保系统的精度,如果损失过多的速度,将影响整个系统的效率。在这种情况下,会产生一个精度和速度之间的矛盾,在这个问题中,这是需要探究的矛盾,而最小二乘法能有效地减小这个矛盾。
- 数学模型的建立
在称重系统中,应变称重传感器和称重机构相当于一个弹簧和阻尼组成的二阶控制系统。系统如下图1所示。
图1. 称重系统模型
根据控制原理和动态分析,可建立称重系统的数学模型:
上述公式中,“m”指机构自重,“M(t)”指给料重量的时间函数,“C”指阻尼系数,“K”指称重传感器的刚度,“F(t)”指材料的反作用力,“x”指机构相对于参考点的位移。
方程(1)是位移和给料量的关系模型。位移x通过AD转换器获得,它与电压信号V(t)成比例。因此式(1)也是电压信号V(t)和质量M(t)的关系模型。通过(1)式,我们可以知道该系统是一个时变非线性系统,不能用传统的控制原理来分析。当系统的量是常量时,(1)将是一个典型二阶线性系统。但也没有更成熟或相对较新的方法来解决这个问题。在控制理论中,通常采用分段线性化的方法来分析,时变非线性系统看成一个多时间间隔线性系统,通过简化一个线性时不变系统来是分析使分析和简化更简便[1]。在小段时间[]内,M(t)可以认为是不变的,F(t)是常量,所以(1)式可以转化为:
(2)式是在一段确定的短时间内的系统静态模型。在控制原理中,初始状态是非零,对方程(2)两边都执行拉普拉斯变换。式(2)转换成域进行计算,这样转换计算更为方便,(2)的转换结果是:
其中,Grsquo;=Mg F
(3)式也可转换成:
其中,
因此,(4)可转换为:
其中,
在实际应用中,在微小时间段[]内,M(t)是随时间不断变化的,和斜波信号类似。系统的数学模型中的和xi;参数可以随(5)中时间的飞速增加而不断减少,系统将变为时变非线性系统[1]。
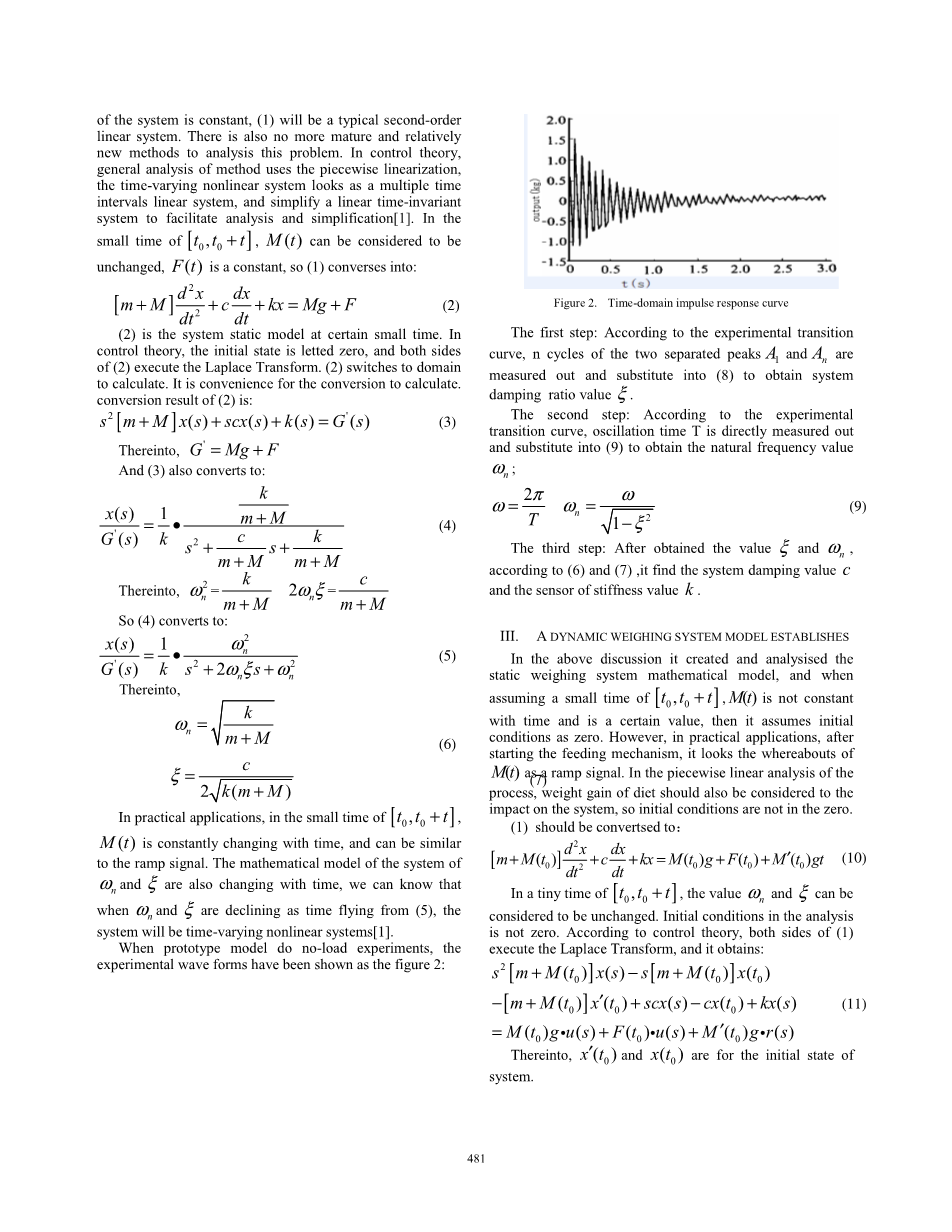
当样机模型做空载实验时,实验波形可以形成,如图2所示:
图2 时域脉冲响应曲线
第一步:根据实验过渡曲线,两个分离的峰值A1和An的n重循环可以测量出来,代入式(8)后可以获得系统阻尼比的值xi;。
第二步:根据实验过渡曲线,震荡时间T可以直接测量出来,代入式(9)中,可直接获得固有自然频率;
第三步:获得和xi;的值之后,根据(6)和(7),可以得到阻尼系数的值C和传感器的刚度值k。
- 动态称重系统模型的建立
上述讨论中创建并且分析了静态称重系统的数学模型,且当假设在一小段时间]内,M(t)不再是一个时间常量,而是一个确定值,且假设初始条件是0。然而,在实际应用中,当喂料机构启动后,M(t)下落产生的信号看成一个斜波信号。在分段线性分析过程中,喂料时总重增加也应该被考虑到对系统的影响当中。因此初始条件并不是0。
(1)式可以转化为:
在一小段时间内,和xi;的值可以认为是不变的。在分析中,初始条件是非零。根据控制原理,对(1)式两边都进行拉普拉斯变换,可以得到:
其中,xrsquo;(t)和x(t)是系统的初始状态。
对式(11)进行简化后得到:
因为整个系统的输入是连续的,且真个系统的输出是离散的,整个系统不适合用于识别。因此将式(12)转化以下离散形式:
其中,a1,a2,b1,b2和c,k,m M(t0)是相关的。b3和c ,k ,m M(t0) ,x(t0) ,xrsquo;(t0)是相关的。
其中,T是采样周期。式(13)等号两边同乘后可得:
其中,(0le;lle;N 2)和c, k, m M(t0), Mrsquo;(t0),x(t0),xrsquo;(t0),T是有关的。
如 y(z)=x(z)·()
然后(14)转化为:
式(15)转化成一个积分方程,根据式(11)可得:
因为k是刚度系数,通过终止变换定理可以得到:
因为弹簧过渡系数k可以通过静态校准得到,根据式(17)和(18)可得:
因为所介绍的分段线性化逼近许多小段时间内的非线性时变系统。式(17)和(18)中的n并不是无限的,但当n值越大时,这两个公式在形式上就越逼近。由此可知,关于式(19)的推导是正确的。V(n)是噪声输入,为简化计算,V(n)看成白噪声,e(n)表示残差,(16)也可表达为积分方程[2]。
从形式上来看,这是一个特征ARMA模型。
(21)说明了动态称重问题实则是一个参数识别问题。根据系统输入和输出,忽略内存递归最小二乘法和其他参数a1 ,a2 ,b1* ,b2*以及在(19)中使用的参数的在线识别系统。这些参数计算时域中的称重函数。Mrsquo;(t)是积分获得的,其将计算将会补给的喂料质量[2]。
- 动态模型的参数识别
根据以上的概念分析,系统微分方程的形式如下:
式中 e(n)=d(n)-x(n),d(n)是理想输出,
X(n)是实际输出。
由式(23)可得:
e(n)是系统残差,包括测量误差,参数估计误差以及由干扰造成的系统误差。当有N n个作为相关输入和输出的数据时,还有一个通过(22)得到的描述系统输入和输出相互关系的方程[2]。
原始系统参数向量被估计的参数向量所取代,这就要求系统的输入和输出数据的关系是最适合的,并且残差是最小的。我们可以通过最小二乘法得到最小二乘估计是:
充分条件的类型的构建是gt;0。是正定矩阵,用式(23)可进行构造。估计量仅仅是一个极大极小估计量。一组新的测量数据是和,根据遗忘因子,方程可递归为:
当被修正,将成为一个新的参数估计值。初始值和的设置是一种在最小二乘参数估计完成并作为初始操作前使用一组数据的方法。然而,这种方法存在矩阵转置的缺点。另一种方法是直接选择,,此处是105~106中的最大估计值。当满足|||/|lt;ε时,递归停止,ε根据称重精度需求设定的一个较小的值,在文献[2-4]中,ε的相对误差是0.000000005。经过分析,如果输入的干扰被看成白噪声,该计算将会使用衰减记忆递推最小二乘法来进行参数估计。
- 仿真
进行参宿估计的方法是为了认证动态称重系统。本人使用matlab7.0软件来进行仿真实验[5]:
- 静态模型仿真和参数识别
此处有两组参数,M=2kg和M=10kg,根据静态模型,系统反映了给料重力曲线,计算结果如图3和图4所示。
图3 响应曲线 M=2kg 图4 响应曲线 M=10kg
该仿真应用的是随机噪声,采用 50Hz取样采样频率,采样数据采用递推最小二乘法进行参数估计,估计值如下表:
表Ⅰ. 估计结果表
根据误差方程,Mrsquo;是识别结果,M是实际重量,N是仿真时间。
误差识别的结果是0.5,这达到了系统的要求,从上述识别结果来看,这种识别方法是对于静态模型的识别来说是正确的。
- 动态模型仿真和参数识别
称重系统中,设置了参数M=10kg,二阶传递函数如下:
在输入斜坡信号的作用下,它验证了使用MATLAB7.0仿真软件进行参数识别方法的正确性。如果给料速度是4kg/s且影响力约为4kg饲料量,输入信号可以写为u(t)=4t+4,计算结果如下图5,6和7所示。
图5 输入信号显示图像
图6 系统响应曲线显示图
图7 参数估计曲线的过渡过程
使用50HZ的采样频率进行采样,采样数据采用衰减记忆递推最小二乘法进行参数估计的递推,这是结束条件,复发时间为400,估计结果如下表所示:
表Ⅱ 估计结果
当取N=5时,遗忘因子是0.98,根据估算的加料流计算5秒内的误差:
e=4x5-3.998x5=0.01(kg)=10(mg)
可以看出,当使用系统识别时,误差明显减小,这种方法可被应用到验证动态称重的正确性中。
参考文献
[1] Lin,Yonghong etc,Studey on dynamic weighting of power materials Wuhan Gangue Xueyuan Xuebao/Joural of Wuhan Iron and SteelUniversity,v23,n3,Sep,2000,263}264
[2] Li,Peng, Dynamic Weighing of the application Based on Parameters Identification, Dissertation, Northeastern University ,2006.5
[3] Jiang Yongqing, Analysis of dynamic weighing system,Dissertation Harbin University of Science ,2003.4
[4] Qiang Minhui,Zhang Jinge,Based on MATLAB recursive parameteridentification and simulation, AUTOMATIONamp;INSTRUMENTA-TION,2008(6)
[5] Hou Yuanbin etc, System Identification and Simulation MATALAB Beijing: Science Press,2004.
针对动态称重系统的最优数字控制和滤波
W Balachandran*, M. Hallimic*, M. Hodzic**, M. Tariq*, Y. Enab* and F Cecelja*
* University of Surrey, Department of Electronic and Electrical Engineering
Guildford, Surrey GU2 5XH, England (UK)
Phone 44 1483 259126 Fax 44 1483 34 139 E-Mail W.IBalachandran@ee.surrey.ac.uk
**WIS and ITU. 2363 Bering Drive, Sail Jose, CA 95 13 1, USA
引言——需要用到控制的一个领域是基于动态称重系统的称重传感器。称重传感器是一种可控设备。其原理是电磁压电效应。完善动态称重的两个主要目标为:(1)提高称重速度;(2)获得更好的测量精度。这两个目标是相互矛盾的,可以通过集成控制和滤波法来实现。线性二次高斯滤波法是一种优化设计法,这种方法在一种集合方式中结合了控制和滤波。因此,这篇文章探讨了使用线性二次高斯法提高基于动态称重系统的称重单元的性能的可能性。此外,本文还讨论了称重单元的数学模型和力方程。这些模型是用来确定所提出
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146180],资料为PDF文档或Word文档,PDF文档可免费转换为Word

