英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
四连杆门座式起重机有限元模态分析
关键词:模态分析,四连杆,频率,起重机。
摘要:本文以卫华生产的MQ2533四连杆门座式起重机为研究对象,根据臂架系统结构特点建立简化模型,利用ANSYS软件建立一个四连杆机构有限元模型并执行模态分析,并提供四连杆机构轻量化设计的理论依据。
简介
作为一个大型起重运输设备、门座式起重机广泛应用于港口码头、船厂和大型水电站,其性能直接影响货物转运效率。根据臂架的形式门座式起重机可分为四连杆组合臂架式门机和单臂架门座式起重机两种。前者的最大优势是在同等的起升高度下具有更大的工作幅度。因此,四连杆门机的总高度低于后者,整体重量也较轻,但是臂架结构较为复杂。目前,国内企业大多数使用四连杆门机。回转机构布置在转台上,臂架系统的下铰点与转台相连。 有一个运行机构,在预定轨道上运行。四大机构的协同运作,从而完成设备的安装,和卸船作业。如图所示,四连杆组合臂起重机。
图1四连杆组合臂门座起重机
机械结构要满足强度、刚度和稳定性的要求,也要满足了动态特性的要求。模态是机械结构振动的固有特性,每种模形都有其相应的固有频率和模态形状。我们可以通过每个模型的频带获得的四杆连杆门式起重机的固有频率和模型主体。它可以估算在一定的激励振动响应并且避免激励源的频率靠近相关机构模型的固有频率。基于这些,尤为重要的是,本研究中所示的方法可以为早期故障振动和以后的的结构优化提供了理论支持。
四连杆组合臂架的有限元模型
网格:MQ2533门座式起重机的臂架是由钢材焊接而成箱型梁结构,主要技术参数如表1所示,在建立全焊接部分模型的时候,我们忽略了孔、三角肋等一些精细结构板,简化为一个连续的整体吊杆的三维模型。此外,我们应该把臂架系统上的梯子、栏杆、管道和其他润滑系统的质量以均匀形式分布。
表1:起升机构的技术参数
|
类别 |
参数值 |
|
臂架系统净高(M) |
10 |
|
最小幅度(M) |
9 |
|
最大幅度(M) |
33 |
|
额定起升重量(Kg) |
25000 |
|
额定起升速度 (m/s) |
0.67 |
|
起升高度 (m) |
42 |
|
工作级别l |
M7 |
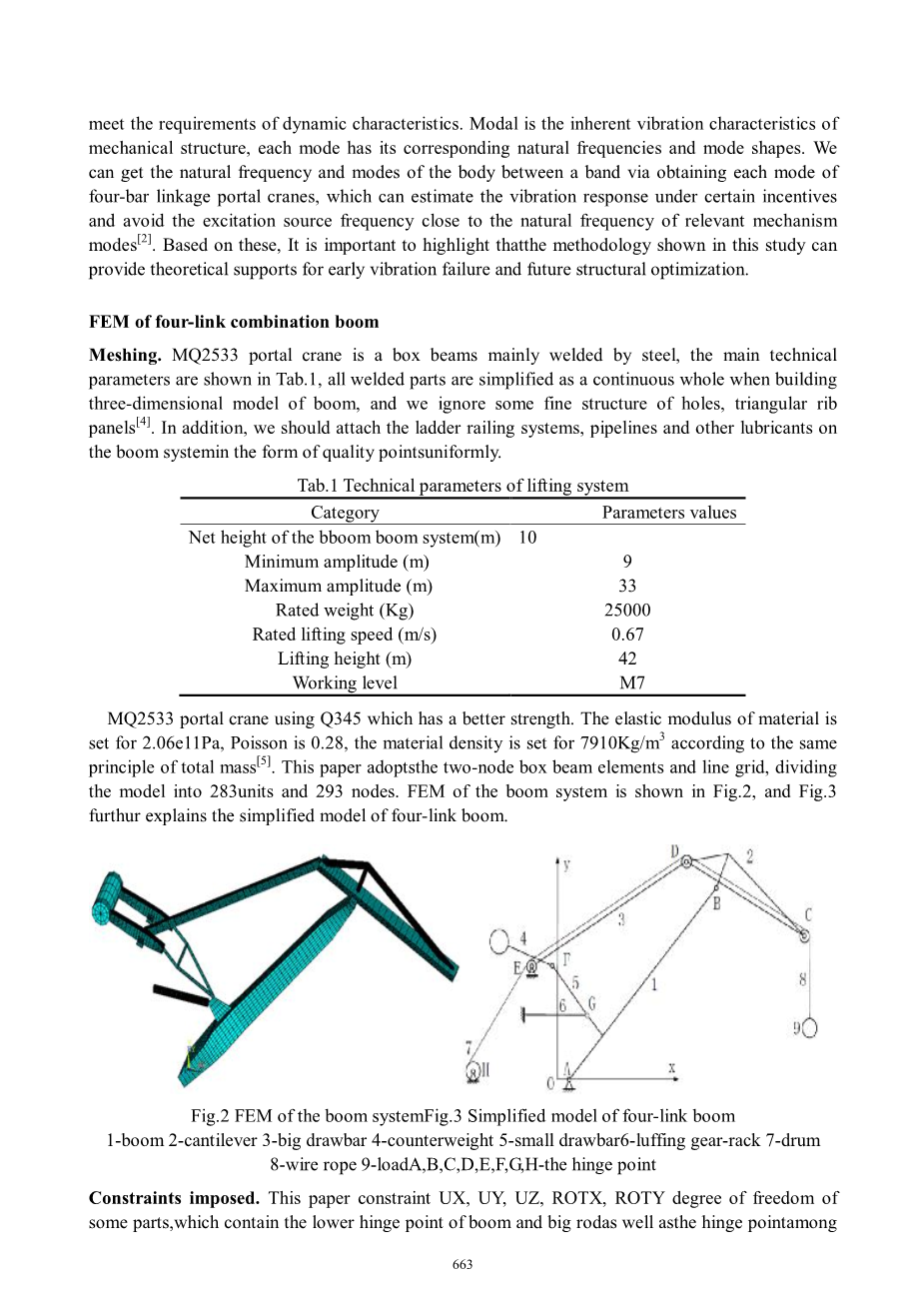
MQ2533门座式起重机采用具有更高强度的Q345低碳钢。材料的弹性模量是2.06e11Pa,泊松比为0.28。根据总构件同材料的原则,材料的密度确定为7910千克/立方米。本文采用双节点箱形梁单元和线网格,将模型划分为划分283单元和293节点。图2是臂架系统的有限元模型,图3所示进一步解释了四连杆臂架简化模型。
图2臂架系统的有限元模型. 图3四连杆臂架简化模型
1大臂2象鼻梁3大拉杆4活配重5小拉杆6变幅齿轮齿条7钢丝绳卷筒
8钢丝绳9负载A,B,C,D,E,F,G,H-铰接点
限制自由度
本文约束一些部件的UX,UY,UZ,ROTX,ROTY自由度,其中包含了梁和大拉杆的下铰点、以及各杆之间的铰点,让它们只能绕Z轴旋转。同时,我们应该约束剩余部位所有的自由度。
模态分析
本文用ANSYS选择模态类型,然后执行 “Solve Current LS”命令。每个模式的相应频率示于表2,根据门座式起重机的结构和操作特性,它的执行单元在低频范围内执行,因此较低的模态频率对动态特性的影响起主要作用。相反的,高频对动态特性的影响较小,所以可以忽略。因此这里我们只选择前四个低频模态。
臂架系统的前4个固有频率
|
顺序 |
1 |
2 |
3 |
4 |
|
频率 |
1.3703 |
1.8357 |
2.3344 |
3.0274 |
从上表可以看出,前4个固有频率均超过了 1Hz,这说明四连杆组合臂架满足起重机设计准则。
臂架系统的前四个模态的形状示于图4至7。
图4第一振动频率 图5的第二振动频率
图6第三振动频率 图7的第四振动频率
在实际工作过程中,臂架振动的主要激励是起升载荷和风载荷,图4描绘的是第一模态固有频率为1.3703hz时臂架在水平方向的摆动。负载振动主要是相对于悬绳的长度和回转速度,因为本文不研究回转情况而忽略了风荷载,我们就没有必要对第一模态进行分析。从图5看出,第二模态固有频率为1.8357Hz,分析臂架绕臂架与小拉杆的铰点的摆动,它取决于实际起升过程。因此,操作者不应再高速启动或越级调速,以免发生大的冲击影响。图6显示模态三的摆动是绕着臂架的底部铰点,其频率为2.3344hz。主要是由于变幅过程中,货物的摆动引起的;图7给出了第四模态,其中主要示出了臂架的扭转,其自然频率是
3.0274Hz.这种模态形状通常是在多个因素共同作用的结果,例如旋转和升降同时进行。
概要
门座起重机的四连杆组合臂架系统的模型为动态分析,稳定性分析及相似结构的轻量化设计提供了参考。门式起重机的四杆连杆机构的前四个固有频率均大于1Hz,表明臂架系统能够满足动态设计标准。在实际工作的过程中,操作者不应该高速启动或越级启动,以避免发生大的冲击。未来更多,操作者应尽量避免在参数设置中容易产生的共振频率值。
致谢
我非常感谢中国科技部国家重点基础研究发展计划对这项研究的资助。该基金编号是2015BAF06B06和2015BAF01B04。
参考文献
[1]Chen Xinquan, He Yanping, Li Hongliang, Tan Jia-hua1. Study on the dynamic load of rope and
its effect on floating and stability of revolving crane vessel [J]. Journal of Shanghai Jiaotong
University, 2010,44(6): 778-781.
[2] Yongfeng Zheng, Shicheng Hu, Xiangjun Wang, Yongwang He. Finite element analysis and
structural optimization of the reachstacker frame[J]. Journal of Mechanic Manufacturing,
2013,51(587): 18-20.
[3] Hector A. Tinoco, Diego A. Ocampo, Juan R. Sanz-Uribe.etc. Finite element modal analysis of
the fruit-peduncle of Coffea arabica[J]. Computers and Electronics in Agriculture
108(2014)17-27.
[4] Liming Li. Practical guide of finite element analysis[M]. Tsinghua University Press, Beijing,
2005.1, 266-270.
[5]Xu Lixin,Yang Yuhu,Chang Zongyu.Modal Analysis on Transverse Vibration of Axially
Moving RoHer Chain Coupled with Lumped Mass[J].Journal of Central South University of
Technology(English Edition), 2011,18(1)109-115.
[6] Shicheng Hu, Shuo Ouyang, Ningbo Zou, Xiangjun Wang. The electromechanical coupling
dynamics modeling and analysis of portal cranes hoisting system[J]. Advanced Materials
Research, v 952, 2014, 210-15.
门座起重机基于WPF的虚拟现实的方法
出版公司:Hindawi
机械工程研究
卷2013,文章编号320757,5页
http://dx.doi.org/10.1155/2013/320757
研究论文
Jingsong Li, Quan Liu, and Hang Su
中国湖北省武汉理工大学宽带无线通信和传感器网络重点实验室 邮编:430070通讯作者为Jingsong Li,邮箱:jingsongtree@whut.edu.cn
来信日期为2013年3月15日;2013年5月22日被接收
学术编辑:Shane Xie
版权所有copy;2013为Jingsong Li等人。这是知识共享许可下发布的开放性的文章,允许不受限制地使用、分配和复制在任何媒介,提供最初的资料以被正确地引用。
随着虚拟现实技术的发展,门机监控系统也逐步走向移动虚拟化;虚拟仿真实验软件大量出现。经过综合分析国内外建筑虚拟现实技术的发展现状,本文提出了一种基于WPF技术虚拟现实的方法。该方法的具体内容总结如下:首先,通过3dsMax软件建立门座起重机模型,其中包括底盘,驾驶室和主钩。其次,增添了港口的场景,包括大海,天空和海岸。最后,我们使用WPF创建的门机监控系统来虚拟现实模块。根据一组性能测试,我们可以得到的性能测试表示,该WPF系统可以提高CPU利用率和减少在模拟门机的3D模型时内存使用情况。
1.简介
随着信息技术的发展,虚拟现实技术越来越广泛地应用在大型港口机械。许多公司已经开发出大量的的门座起重机远程监控系统。然而,这些监控系统通常显示门座起重机运行状态的示意图,图例和数据[1]。显现的信息无法描述的大量港口机械的状态,并且它缺乏与用户的交互。
Windows演示基础(WPF)是由微软公司推出了基于Windows Vista的用户界面框架[2]。WPF应用程序在一个网站也可以部署作为独立的桌面程序或托管作为一种嵌入式对象。WPF旨在统一了一些常见用户界面元素,诸如二维/三维渲染,固定和自适应文档,排版,矢量图形,运行时动画和预渲染的媒体。然后,这些元件可被连接并用于各种事件操纵,用户链接和数据绑定。微软已经发行了五种主要的WPF版本:WPF3.0(2006年11月),WPF3.5(十一月2007),WPF3.5sp1(2008年8月),WPF4(2010年4月),和WPF4.5(2012年8月)。
本文研究了WPF技术和3D建模技术,并在此基础上,提出了一种基于WPF的门机三维仿真方法,建立基于3D的新一代监控系统,身临其境和交互式实时仿真环境。该系统能够实时模拟门座起重机的三维虚拟场景的和实时三维模拟来显示港口机械的运行状态和运行环境。系统用户可以在任何地方和任何观测点移动和调整角度来实现实时监控。
- Windows 展示基础
几十年来,随着产品屏幕操作的日益普及,在我们的日常工作和生活中用户界面是非常受欢迎的.然而,Windows开发者一直在使用界面显示技术,本质上是一样的。一个设计良好的用户界面,可以大大提高工作效率,减少由于接口问题造成的用户的咨询和投诉,以减轻客户服务和售后服务的压力。所以,用户界面的设计对于任何产品或服务都非常重要[3]。
微软提出了在体系结构中,网络框架3.0作为WPF窗口统一显示系统。这是微软的下一代图形系统,并提供了用户界面,二维
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148818],资料为PDF文档或Word文档,PDF文档可免费转换为Word

