英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
行星齿轮传动系统耦合动力学分析
前言
行星齿轮是机械传动的重要类型,通常由一个太阳齿轮、若干个行星齿轮、一个内齿圈和一个支承行星架组成。在与平行轴传动相比,行星齿轮具备许多优点,诸如高速,高效率,传递功率更高以及更强的稳定性等[1]。因而,它们被广泛应用于飞机、轮船、汽车、风力涡轮机以及各种其他方面。然而,行星齿轮传动中因振动会产生极其强烈的噪声,有时甚至会影响了整机的可靠性。例如,舱内噪声超过100dB的直接归因于一些直升机中行星齿轮传动。
行星齿轮的分析动力学模型可分为三类,即集中参数模型、分布质量模型和刚-柔耦合模型。集总参数模型是最早、最成熟的行星齿轮动力学建模方法。每个运动部件被简化为一个质量点。运动部件由弹簧连接起来,表示啮合齿和支承轴承。因此,行星齿轮被简化为弹簧-质量系统,从而可以进一步建立二阶微分方程来表示系统的动力学模型。根据自由度的数量,集中参数模型可以进一步区分为纯扭转动力学模型,平移-扭转耦合动力学模型,或包括传动轴在内的平移-扭转耦合动力学模型。分布质量模型是将轮齿间的啮合用有限元模型进行简化。由于考虑了啮合过程,在该模型中计算的时变啮合刚度更为精确。在刚-柔耦合模型中,诸如内齿圈全这样的零件都被假定为柔性体,需考虑它们的刚度,而其他零件则被假定为刚性体。abousleiman和Velex在对环形齿轮进行三维有限元模型建立的基础上提出了混合有限元/集中参数模型。他们认为行星齿轮的固有频率呈现一种集中的趋势。在相对较高的频率区域中,有三个固有频率簇被记录。每一个固有频率簇包括一个扭转振动模态,一个横向振动模态,和一个行星振动模态。Parker 和 Wu基于连续离散的混合模型分析了包括弹性内齿圈在内的行星齿轮系统不稳定的相关参数。研究了行星齿轮的振动模态特性,其中有一个特征表明,振动模态有明显不同的运动形式。振动模态分为两类,即清晰的和含混不清的两种模式。之前对行星齿轮的振动机理进行了大量的研究工作,但是,目前还没有很明显的方法来降低行星齿轮传动结构的振动。基于集中参数模型和有限元方法,通过动态负载转移的方式将系统动力学和结构动力学相结合。分析结果表明,所提出的耦合动态分析方法是分析动态特性较为方便的一种方式。通过对该系统和结构的动态性能的分析,从而对行星齿轮的设计起到一定的帮助和指导作用。
行星齿轮传动系统结构耦合动力学分析方法
系统结构耦合动力学分析的一般过程。
在行星齿轮的动态振动中,有很多激励和影响因素,其中既包括系统参数,又包括结构参数。如果系统和结构的影响因素被认为是在同一时间产生的,那么将得出更为准确的动态特性。一种通用的系统结构动态耦合的程序如图1所示。
图1 耦合系统动态分析过程流程图
该分析过程包括四个步骤,即刚度和质量的计算、行星齿轮模态分析、系统动力响应分析和基于有限元分析的齿轮结构动力响应分析。要输入的模型和数据包括齿轮模型(太阳轮,行星轮和内齿圈)、系杆模型,支撑刚度,和工作条件。输出数据包括系统的动态性能(频率和动态负载)以及结构的动态应力。每一步完成之后,分析结果将被用来作为判断行星齿轮设计是否需要改进的依据。
系统动力学与结构动力学的耦合方法
系统动力学与结构动力学之间的联系是各组成构件之间力的相互作用。为了解决耦合问题,我们提出了一种传输负载法。行星齿轮传动系统的动态响应分析过程结束后,可以得到每一个齿轮的动载荷。然后再用有限元法对施加在齿轮三维结构上的动态载荷进行结构动力响应分析。
行星齿轮传动系统的基本参数模型
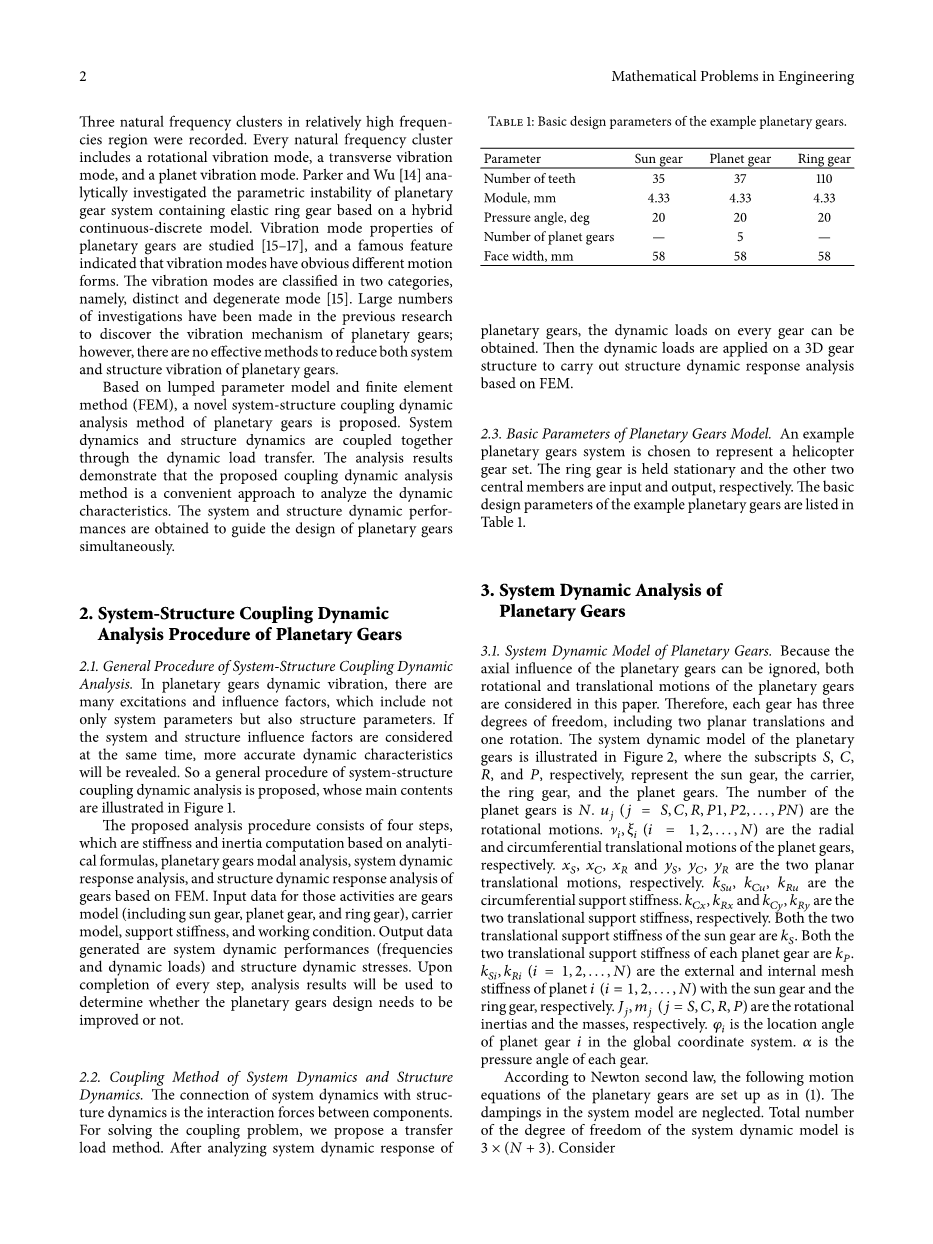
现在以安装于直升机内的行星齿轮传动系统为例来说明。它的内齿圈保持静止,另外两个中心构件分别是输入和输出。其基本设计参数如表1所示。
表1 行星轮系基本设计参数
行星齿轮传动系统的动态特性分析
行星齿轮传动系统的动力学模型
由于在分析行星齿轮的旋转与平移运动时忽略掉了行星齿轮轴的影响。因此,每个齿轮有三个自由度,包括在平面内的两个正交平移运动和一个旋转运动。行星齿轮的系统动态模型如图2所示,下标C,R,andP分别代表太阳齿轮,行星架,内齿圈和行星齿轮。
图2 行星轮系系统物理模型
假定行星轮的个数是N。uj (? = ?, ?, ?, ?1,?2, . . . , ??)是旋转线位移。vi,zeta;i(i=1,2∙∙∙N)分别是行星齿轮径向和切向位移。??, ??, ??和??, ??, ??分别是平面内的两个正交线位移。???, ???, ??? 是圆周上的支承刚度。???,??? 和???,??? 分别是平面内相互正交的两个线位移的支承刚度,中心太阳轮的在平面内的两个正交方向上的支承刚度都是KS。??,?j(? = ?, ?, ?, ?)分别是各构件的转动惯量和质量。??是行星齿轮i的定位角,? 是每个齿轮的压力角。
根据牛顿第二定律,建立行星齿轮传动系统的运动方程。得式(1):
这里, ??, ??? (? = 1,2, sdot; sdot; sdot; , ?) , ?? 是基圆半径;rC是支承系杆的有效半径;????是太阳轮和行星轮之间的相对位移;????是内齿圈和行星轮i之间的相对位移; ???? 和? ???分别是在与行星轮固接的动坐标系中行星轮i和支承系杆之间的相对位移。
式(1)可以换算成矩阵标准形式:
(2)
[?]是质量矩阵,[?(?)]是时变刚度矩阵,{?}是位移向量,{?(?)}是载荷向量。
参数计算
齿轮副啮合的时变刚度
齿轮副的啮合刚度一直都随啮合的位置变化而变化,总的变形量u(t)是在齿轮啮合的整个过程之中沿接触方向随之产生的。因此,齿轮副的时变啮合刚度K(t)的表达式为
式中,Rb是主动齿轮的基圆半径,T是输入转矩。时变啮合在齿轮副啮合周期之内是一个周期函数。一次啮合周期函数图像如图3所示.
图3齿轮拟合刚度变化图
轴的扭转刚度
在计算轴的扭转刚度时,可以把轴等效成一个中空轴。因此,轴的扭转刚度计算式可以写成:
式中,G是剪切模量,L是轴的长度,?1 是轴的内径,?2是轴的外径,IP是轴的极惯性矩。
轴的惯性矩
轴的的惯性矩计算方法和轴的扭转刚度类似,其计算式为:
式中,L是轴的长度,?1 是轴的内径,?2是轴的外径。
行星齿轮传动系统模型的分析
在进行行星齿轮传动系统模型的分析时,令(2)式中的负载向量{?(?)}为零。根据之前计算齿轮副时变啮合刚度的方法得出齿轮副的啮合刚度。可得示例中行星齿轮的啮合刚度为??? = 1.088 times; 109 N/m和??? = 1.238 times; 109 N/m。再加上之前假定的各种刚度:??? = 6.0 times; 108 N/m, ??? = 5.0 times; 108 N/m, ??? = 9.0 times; 109 N/m, ?? = 2.0 times; 108 N/m, ?? = 2.0 times; 108 N/m, ??? =??? = 3.0 times; 108 N/m以及??? =??? = 9.0 times; 108 N/m,可计算得出系统的前12阶固有频率,如表2所示:
表2 行星齿轮前12阶固有频率
分析所得结果,可以看出该传动系统存在两种振动模式。第一种,传动系统内的所有零部件的振动都发生在旋转和直线位移这两个方向上。如图4所示:
图4 各零件振动模型图
第二种振动形态是仅有行星齿轮的振动,其他零部件没有很明显的振动趋势。如图5:
图5 行星齿轮振动模型图
行星齿轮传动系统的动力响应分析
系统的输入功率为1200KW,转速为1435rpm,输出转速为350rpm。假定没有能量损耗,我们能通过(6)式,计算得出输入转矩TD和输出转矩TL的值分别为?? = 7985Nsdot;m和?? = 32739Nsdot;m,
外载荷向量的准确值是基于(2)式得出的,通过傅里叶级数可以求出行星齿轮传动系统的动态啮合力和旋转位移。图6(a)显示的是太阳轮和行星轮之间的动态啮合力,图6(b)显示的是行星齿轮和内齿圈之间的动态啮合力。图7显示的分别是太阳轮、行星轮和内齿圈之间的旋转角位移。
图6 作用在行星齿轮副的动态啮合力变化规律
图7 行星齿轮副的动态转角位移
基于有限元法的动态载荷分析
基于有限元法的结构动态分析的基本准则
其准则说明如下。
结构动力学方程
结构动力学分析的第一步跟静态分析相似,就是将结构分为很多单元体。然后整个有限元(FE)分离结构的动力学方程是建立在单个单元体的动态方程的基础上。哈密顿原理作为变分准则来构建整个有限元方程。
哈密顿原理。即在所有可能的时变位移形式中,拉格朗日函数都需要满足相容性条件,约束条件,运动边界条件和时间条件[18]。
单元体动力学微分方程可写成:
,
式中,[Me]为单元质量矩阵,[Ce]为单元阻尼矩阵,[??]为单元刚度矩阵,{??(?)}为节点力向量,{??}是节点位移向量。
通过集合每一个单元的方程(7),可以得到结构体系的整体有限元动力学方程
式中,[Me]为系统质量矩阵,[Ce]为系统阻尼矩阵,[??]为系统刚度矩阵,{??(?)}为节点力向量,{??}是节点位移向量。
结构动力学方程的求解方法
结构动力方程(8)是二阶微分方程。如果没有外部激励力,即(8)中的等式右边=,此时求解方程的非零解的过程就是对系统进行自由振动的过程。求解得到的该方程的特征值和特征向量即是该结构的固有频率和振型。事实上,阻尼对结构自然频率和振型的影响不大。因此,在对结构进行固有频率分析时可忽略其阻尼带来的影响。方程(8)被简化成
图8 内齿圈有限元模型
假设结构存在简谐振动,则有
式中,是旋转频率,是初始相位,是时间变量,是与时间无关的幅值。
方程(9)结合方程(10),可得
这里。这样就将问题转化为求解方程的广义特征值问题。
解决问题的结构动力学,问题的核心是获得和。很明显,方程解仅仅取决于由刚度矩阵和结构的质量矩阵。是特征值,相应的振型是特征向量。在三维动态分析中,由于质量矩阵和刚度矩阵都是对称正定矩阵,所有特征值都是非负实数。
在对结构动力学方程(8)求解时,模态坐标应发生变化,动态
在原始的物理空间里的动态方程应当转换成模态空间里的方程。前面的阶基础模态对应的是坐标传递矩阵,所以系统模型的阶数是减少的。由此,方程(8)被解除耦合,简化为二阶相互独立的微分方程,根据这些方程来计算结构的位移响应。计算出各部分的动态应力和。等效应力根据屈服准则定义为:
齿轮的动力学分析
结构动态分析是一种寻求齿轮动态特性和强度的通用的方法。利用ANSYS软件,对行星齿轮进行结构动力学分析。为了能阐述得更具体一点,现在我们将内齿圈作为一个例子,它的有限元模型和分析结果如下所述。
建立内齿圈的有限元模型
在有限元分析软件ANSYS建立了内齿圈几何模型,如图8所示。该模型包括693222个元素和760
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[154235],资料为PDF文档或Word文档,PDF文档可免费转换为Word

