
英语原文共 6 页
使用RFID和ZigBee网络的AGV防冲突方法
Ko, Jae PilJung, Jung WonJeon, Jae Wook
摘要:
这项工作提出了一种自动引导车辆( AGV )的防撞方法。在本研究中,我们展示了三种方法来获取AGV的位置,确定两个或更多AGV进入碰撞区域的优先级,以及控制ZigBee网络上AGV的路线。首先,AGV很容易从廉价、可靠和灵活的射频( RF )标签中获得其位置和方向数据。第二,控制塔,即协调器,通过基于先进先出算法和共享内存架构组合通过其他AGV获取的各种数据来确定AGV的优先级和路线。第三,AGVs将它们的状态数据发送给协调器,并从ZigBee网络上的协调器接收驱动数据,ZigBee网络是使用小型、廉价、低功率数字无线电的无线通信协议的规范
第1节。介绍
许多电子制造厂使用AGVs来节省生产其产品范围所需的材料的物流成本。特别是,这项研究促进了一种改进先前AGV控制系统中防撞方法的方法,因为生产各种产品的制造工厂需要低成本和可靠的物流系统。
过去,AGV调度系统使用各种昂贵的传感器来防止AGV在电子加工行业的碰撞,如半导体或液晶显示器1号, 2号。首先,AGV调度系统通常控制AGV的路线,并防止AGV之间发生冲突。然而,当使用该系统时,在特殊情况下,例如网络问题,会发生冲突。AGV中使用了昂贵的传感器来应对这些异常情况。因此,AGV能够检测前方障碍物,从而避免碰撞到其他AGV或工人身上。然而,AGVs的防撞功能仅用于使用照片或超声波传感器[ 3 ]的前方检测,因为随着低成本AGVs的开发,调度系统的功能被删除。
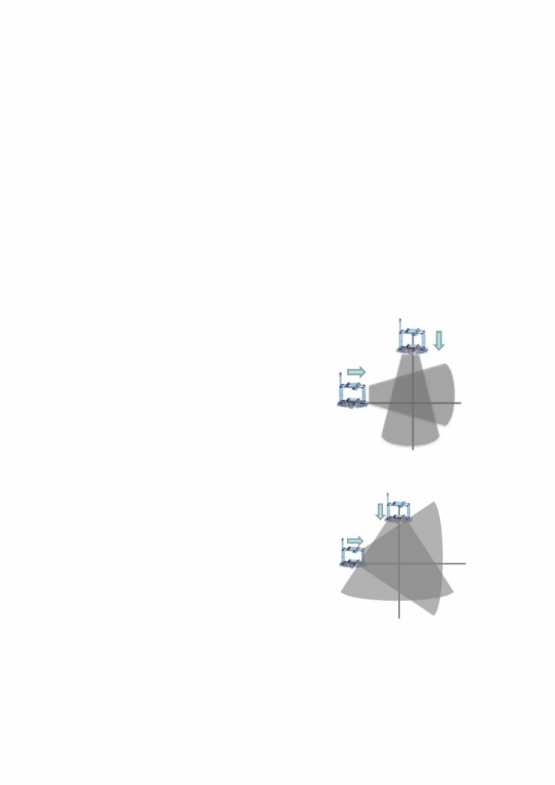
如果仅将传感器用于防撞系统,则会出现一些限制。 在前传感器灵敏度较高的情况下,AGV具有特殊的停止误差,因为它们在通过狭窄路径时将墙壁或支柱识别为障碍物。 另一方面,如果灵敏度低,则AGV经历碰撞,因为检测距离短于AGV的断开距离,如图1所示。此外,AGV不会避免由于盲点而导致的碰撞。 由于AGV在它们同时进入交叉区域时同时检测到传感器并且它们具有死锁,如图2。
。
图1发生碰撞是因为检测距离短于制动距离图2由于AGV之间的同时感测而发生死锁
这项研究的目的是找到AGV的位置,并实时防止AGV的反碰撞
图3先前的AGV控制系统
本文的其余部分安排如下。 在第2节中,通常介绍具有RFID和ZigBee网络的先前AGV控制系统。 第3节解释了改进的防碰撞方法,它详细地克服了先前系统的问题。 在第4节中,我们研究了将该系统应用于实际制造工厂时的实验结果和其他解决方案。 第5节为未来可能的工作提供了结论和建议。
第2节。
先前的AGV控制系统
2.1系统配置
首先,AGVs装载完整产品的原材料;他们只在制造区域沿着薄铝箔行驶。然而,随着物流变得越来越复杂,需要一个控制AGV的系统。
目标制造工厂中使用的先前AGV控制系统如图3所示。每个组件都有如下所示的角色。
自动导引车控制系统:监控自动导引车的位置,并在特殊情况下控制自动导引车。
无线IO :使用ZigBee网络,用FIFO方法控制AGVs进入交叉区域。
射频阅读器:识别AGV的当前位置,读取附着在AGV路线上的射频标签。
协调器:在ACS和AGV之间进行无线通信。
2.2使用RFID获取自动导航车的位置
射频识别( RFID )是一种在电磁频谱的射频( RF )部分结合使用电磁或静电耦合来唯一识别物体的技术。RFID越来越多地在工业中被用作条形码的替代物。RFID的优点是它不需要直接接触或视线扫描。RFID系统由三个部件组成:天线和收发器(通常组合成一个阅读器)以及应答器(标签)。天线使用射频波发射激活应答器的信号。激活后,标签将数据发送回天线。该数据用于通知可编程逻辑控制器应该发生动作。这一行动可以像打开一个访问门一样简单,也可以像与数据库接口以进行货币交易一样复杂[ 4 ]。
在这项工作中,AGVs使用RFID通信获取交叉区域的数量和方向数据(进出)。使用铝箔带将RF标签附着到交叉区域的地板上;它被输入和输出方向标签分开。由于射频阅读器安装在AGV的底部,AGV在向前行驶时会读取射频标签,而不会停下来获取其行驶数据。使用RF标签的另一个优点是它的灵活性——最近,由于小批量生产,制造环境的物流经常变化。用户将很容易根据需要改变射频标签的位置。
2.3使用ZigBee网络共享驾驶数据
ZigBee是基于IEEE 802.15.4 (PHY,MAC )标准的无线通信协议规范,用于个人区域网络,使用小型、廉价、低功率的数字无线电。通信速度低;然而,由于电池的消耗大约是蓝牙的一半,是WLAN的1 / 100,而且其硬件价格也很划算,所以它已经被应用于使用远程控制和监控技术的领域,例如无处不在的无线传感器网络、家庭网络和自动化解决方案[ 5 ]。
在这项工作中,ZigBee网络用于共享AGVs的无线驾驶数据。因为,正如上面提到的RFID,由于体积小且价格便宜,它易于安装;维护起来也很简单,因为由于电池的低消耗,用户很少更换ZigBee模块。
2.4防碰撞算法
AGVs的防碰撞系统从读取附着在交叉区域的射频标签开始。AGV通过安装的RFID读取器读取RF标签;所连接的无线IO通过ZigBee网络向其他AGVs和协调器广播交叉区域的号码及其从RF标签读取的方向;它将这些数据写入所有AGV的共享缓冲表。如果内部缓冲区中已经存在其他AGV,则每个AGV停止;如果缓冲区中不存在其他AGV,则启动。
这种基于先进先出方法的防碰撞算法如图4所示。共享缓冲区有5列:面积、计数、索引、最后AGV、我的索引。面积是相交区域的数量。计数是进入交叉区域的AGV的数量。索引是指能够通过交叉区域的特定权限。最后一辆AGV是最后经过交叉区域的AGV的id。我的索引是每个AGV的索引。这个缓冲区的关键点是索引和我的索引。当AGV的索引(我的索引)等于index时,AGV经过交叉区域。每个AGV向其他AGV广播其数据,并在读取输入或输出标签时更新共享缓冲区。首先,当AGV 2第一次进入交叉区域并读取In Tag时,它会将其数据广播给其他AGV,并按如下方式更新共享缓冲区。计数是1;索引及其索引为零;最后一辆AGV是它的身份证,两个。AGV 2继续前进,因为它的指数等于指数。第二,当AGV 3进入该区域并读取In Tag时,它会如上所述广播其数据并更新缓冲器。计数是2;索引仍为0;最后一辆AGV不变;它的索引是2。它停止,因为它的索引不等于index。第三,当AGV 2离开该区域并读取Out Tag时,它会像上面一样广播和更新。计数是2;索引从0更改为1;最后一辆AGV是3辆;它的指数是1。AGV 3再次启动,因为它的索引等于索引。在这种防碰撞算法中,所有AGVs都是按顺序控制的。
2.5问题和考虑先前的AGV控制系统有许多问题: AGV经常丢失从RF标签读取的驱动数据;当几辆AGV在一个真实的工厂中使用时,会出现无线通信的错误;由于与ZigBee规范范围的通信距离有限,该系统不能覆盖工厂的全部范围。由于这些问题经常会导致AGV碰撞,因此需要另外考虑
AGV2进入区域1 、然后继续前进、将自己的数据传输给别的AGV
AGV3进入区域、停下、等待接受2车的数据
图4广播的防冲突算法
Agv2离开,AGV3进入
第3节。
改进的抗碰撞方法
在以前的防撞系统中,每个AGV在进入交叉区域时向其他AGV广播其驾驶数据;如果内部缓冲区中已经存在其他AGV,则停止;如果缓冲区中不存在另一AGV,则启动。不幸的是,当应用于实际制造工厂时,该系统会出现各种问题;因此,这个系统需要许多改进。
图5使用改进的防碰撞方法的AGV控制系统
3.1系统与前一系统的差异
在改进的系统中,不同之处在于协调者的角色,以太网上的有线网络和PAN-ID (WPAN )。首先,先前系统中的协调器在ACS和AGV之间执行简单的无线通信;然而,在改进的系统中,它不仅执行无线通信,还控制AGVs。第二,以前的系统只使用无线通信;然而,新系统同时使用有线以太网和无线ZigBee。第三,新系统使用了无线个人区域网( WPAN )的概念。每个协调员有一个PAN - ID控制通过几个交叉区域的所有AGV。以下小节更详细地解释了每一个区别。
3.2通信冲突的解决方案
先前的通信是一种广播方法,其中AGV从标签中读取其位置数据,并将其数据通知给所有其他AGV。然而,当使用这种广播模式过度操作AGVs时,会出现丢失位置数据的现象。换句话说,当一些数据通过这些通信同时传输时,RS232C和ZigBee之间就会发生通信冲突。因此,为了防止ZigBee网络上非特定AGVs广播的突然输入数据,这项工作需要将通信方式从广播改为1 : 1,如图6所示。每个AGV都将其数据依次传送给RF阅读器和协调器。最后,先前共享缓冲器的功能从每个AGV转移到协调器。
首先,AGV从RS232C上的RF标签读取位置数据。其次,它将状态数据传送给协调器。最后,它从协调器接收命令(运行/停止)。由于这种通信进程是连续的,通信冲突不再发生。
图6广播至1 : 1通信
3.3复合通信(有线和无线)
在以前的系统中,只有ZigBee网络用于传输一些数据。顺便说一句,无线通信干扰之所以会发生,是因为在工厂里,几辆AGVs多次广播他们的驾驶数据。因此,该系统仅在AGV和协调器之间使用ZigBee网络,这对于AGV控制系统是必不可少的,因为无线AGV;它在ACS和协调器之间使用以太网,这不是必需的,因为它们接受固定。
由于该系统使用了ZigBee网络(无线)和以太网(有线)这两种复合通信,因此与以前的系统相比,无线通信流量减少了1 / 3。
3.4防碰撞系统的范围
在以前的系统中,AGVs使用ZigBee网络相互广播驾驶数据。然而,由于与ZigBee规范范围的通信距离有限,该系统不能覆盖工厂的全部范围。否则,由于改进的系统使用1 : 1通信,它在协调器和AGVs之间应用无线个人局域网。
协调器有1个PAN-ID来处理通过PAN-ID分配的交叉区域的AGV。这个系统使用的协调器越多,它控制的AGV就越多,涵盖了[一家工厂的范围。
3.5防碰撞方法
AGV与先前的系统一起使用安装的RFID读取器读取RF标签;它向处理ZigBee网络上交叉区域的协调器发送多个交叉区域及其从RF标签获取的方向数据。然后,AGV反映其方向,并在进入交叉区域时无条件停止,以防止在切断与控制AGV驾驶的协调器的通信时发生冲突。
协调器有一个缓冲空间来存储AGVs在处理交叉区域时的进入顺序;当AGV进入交叉区域时,它检查缓冲空间中是否存在其他AGV;它向AGV提供启动信号或待机信号;当n个AGV已经注册在缓冲器中时,它将AGV注册到n 1个缓冲器空间;登记在缓冲器中的AGVs按顺序读出标签,然后离开交叉区域。因此,第n辆AGV逃离该区域,第n 1辆AGV自动启动。图7概括地示出了防碰撞的流程图。
图7防碰撞算法流程图
第4节。
实验结果
4.1 AGV速度的变化
用于这项工作的ZigBee通信速度为25万bpsAGV需要100毫秒才能从协调器接收到响应,并在进入交叉路口区域时停车后启动。用[表1 ]和方程式获得停止信号后,AGV以60m/min的正常速度运行需要2秒钟。( 1 ),因为AGV减速至20 RPM/m

