
英语原文共 17 页,剩余内容已隐藏,支付完成后下载完整资料
基于DELMIA的播种机焊接机器人工作站设计
摘要:2 MBJ系列播种机对焊接质量的要求相对较高,因此,本文提出了一种焊接工作站设计,以机器人代替劳动。本文利用DELMIA数字仿真软件的虚拟焊接功能,对焊接播种机机架的机器人工作过程进行了数字视觉研究。根据播种架的生产要求,建立了工作站的三维物理模型,规划了设备布置图,对机器人进行了焊接分配,过程等,然后在工作站数字仿真的基础上,分析了机器人的可达性,焊接路径,干涉和人体工程学,利用甘特图确保生产节拍时间,输出机器人离线程序,最终达到播种机机架的工艺焊接要求,并根据生产实际焊接机器人工作站设计计划。因此,提高了播种架的焊接质量和生产效率。
关键词:DELMIA;播种机机架;虚拟焊接;工艺分析。
目录
1 前言
播种机架是播种机生产过程中的重要组成部分,是播种机的受力支撑,要求更高的焊接强度,而焊接播种机架的焊接工艺直接决定了播种机的生产能力[1]。当前,播种架主要通过手工焊接,但是手工不能满足标准化焊接的要求,具有一致性低,焊接质量易变性的缺点。此外,由于闲季和偷看季节之间的播种机生产需求有明显的差异,因此在旺季,撞车质量不稳定,在闲季,人力资源被浪费。机器人焊接质量稳定,焊接效率更高。本文提出了2 MBJ系列的排架焊接机器人工作站设计方案,利用DELMIA数字仿真软件的虚拟焊接功能对排架焊接机器人的工作过程进行了数字仿真研究。
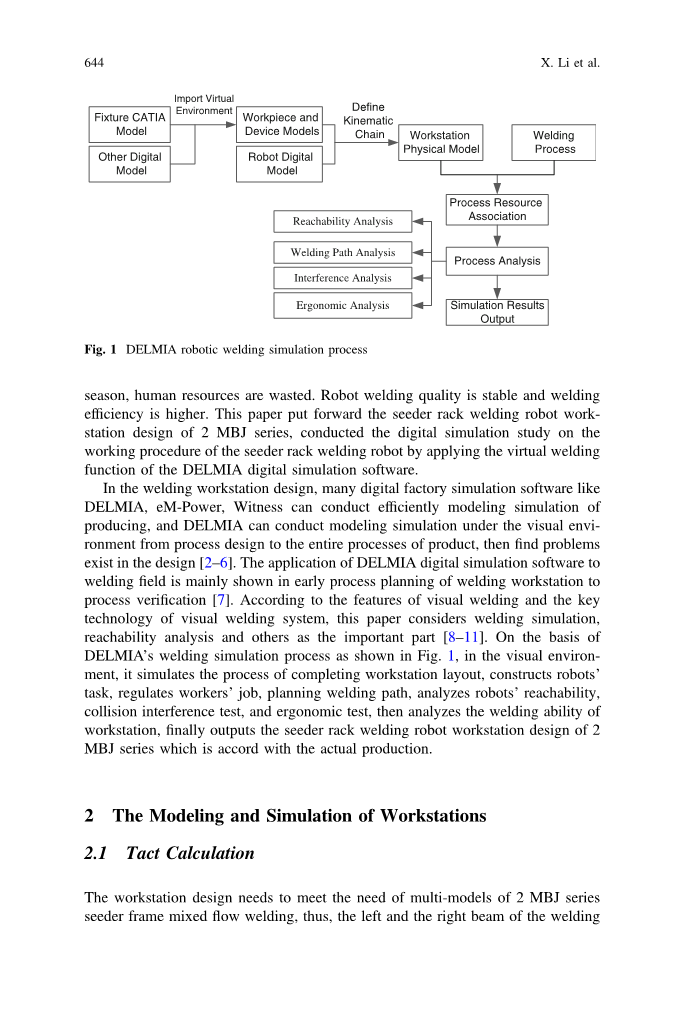
图1 DELMIA机器人焊接仿真过程
在焊接工作站设计中,许多数字工厂仿真软件(例如DELMIA,eM-Power,Witness)可以对生产进行有效的建模仿真,而DELMIA可以在从流程设计到产品整个过程的可视环境下进行建模仿真,然后在设计中发现了问题[2-6]。 DELMIA数字仿真软件在焊接领域的应用主要显示在焊接工作站的早期工艺计划中,以进行工艺验证[7]。根据视觉焊接的特点和视觉焊接系统的关键技术,本文将焊接模拟,可达性分析等作为重要的组成部分[8-11]。在图1所示的DELMIA焊接模拟过程的基础上,在视觉环境中,它模拟完成工作站布局的过程,构建机器人的任务,规范工人的工作,规划焊接路径,分析机器人的可达性,进行碰撞干扰测试和人体工程学测试,然后分析工作站的焊接能力,最后输出2 MBJ系列的播种机焊接机器人工作站设计,这与实际生产相符。
2 工作站的建模与仿真
2.1机智计算
工作站的设计需要满足2 MBJ系列播种机机架混流焊接多型号的需要,因此,必须先完成焊接播种机机架的左右梁,然后才能将机架整体焊接。制作节奏的计算如下:
(1)
(3)
(2)
C = 生产量;
T = 有效生产时间;
n = 计划生产;
p = 生产期;
I = 操作模式;
= 计划的停机时间;
= 计划外停机时间。
播种机架的生产周期P = 6个月,操作模式I = 8小时/天,计划停机时间 = 1.0小时,计划外停机时间 = 0.2小时,播种机机架的焊接生产必须完整n = 6000套播种机 ,生产节拍计划为734 s。
2.2工作站仿真模型
在3D建模软件中,工作站所需的工人,产品和夹具以及其他3D资源被导入到DELMIA的DPM数字仿真模型中。 该工作站采用双机器人焊接在左侧和右侧梁组件,前梁和后梁以及固定膜条上进行播种架的焊接,该机器人选自Fanuc公司的M-20iA型六轴焊接机器人。 工件的夹紧采用手动夹具,例如,垂直铰链式杠杆夹紧装置,推拉式水平夹紧装置。 定位器和行会导轨均采用交流伺服电机控制,并与机器人进行协调控制。 在DELMIA的设备构建部分中,需要定义机器人,链条导轨和定位器的运动链,包括诸如最大转速,旋转和加速度之类的信息。
3 工艺设计
3.1工作站布局
由于工厂空间的限制,根据焊接工作站的产品数据,工艺要求和设施信息进行CAD二维布置,如图2所示。DELMIA中的工厂布置部分需要转移 进入3D布局,并根据工艺计划,需要将工作站的3D模型放置在布局的相应位置。 最后,应该在设备任务定义模块中建立设施和设施任务之间的逻辑移动关系。
图2工作站布局
3.2创建机器人任务
焊缝的播种器框架是线性不连续焊缝,焊缝的每个部分连续运动成多个焊缝。 机架模型播种机中的“弧焊”模块通过“在曲线上创建弧标签”命令切换到“设计模式”,以创建“弧焊”机器人任务。 在设备任务定义模块中,将分配给适当的机器人焊炬的焊接任务“添加标签”命令设置速度,调整定位器的旋转角度以及机器人和定位器的相对位置,机器人将所有焊缝焊接成最佳角度。 枪焊。 通过Teach设备对话框编程机器人的运动路径,并通过Jog调整机器人的每个工作点的位置和方向,以协调机器人完成焊接操作,如图3所示。最终实现数字仿真工作站的各种资源 真实的过程。
图3机器人的任务
3.3工作站流程设计
完成播种机焊接机器人工作站中各种设施的设置,人员和其他过程任务后,使用PERT图来安排每个过程的顺序。 该过程如图4所示:从工作站开始工作,依次连接工人夹具,机器人动作,定位器的翻转和其他过程,直到通过箭头显示工作站的下一个焊接任务为止。 PERT图表以清晰的形式完成了播种机机架焊接机器人工作站的整个生产过程安排。
图4 PERT图
播种架焊接机器人工作站的生产过程完成后,在DELMIA环境中,可以方便地进行机器人焊接,夹紧动作和人员动作等仿真,然后进一步分析工作站的过程,为工作站的规划带来了方便,安装和调试。
4 工作站过程分析
播种机焊接机器人工作站的过程分析任务基于工作站的3D模拟结果,以分析设施布局,机器人的可达性,焊接路径,干扰,人体工程学等方面的合理性。
4.1机器人可达性分析
在弧焊机器人工作站空间布局中,通过使用“设备任务定义”模块的“自动放置”命令,在机器人放置的指定空间中自动搜索机器人可到达的位置,并以不同的颜色突出显示可到达的空间,从而完成空间布局 焊接机器人,以确保每个焊垫都在机器人的工作区域内,然后确定机器人的安装位置是否合适,如图5所示。
图5机器人可到达区域
图6机器人可达性的二次验证
如图6所示,当选择了机器人的位置时,在“弧焊”模块中,我们可以使用“机器人定位器程序”命令对机器人的可达性进行二次验证,以找出机器人的具体焊接点和位置。 无法到达,则根据验证结果,进一步调整机器人的位置和定位器的旋转,最终确保机器人的最佳空间位置。
4.2优化机器人的焊接路径
在DELMIA 3D环境中,机器人焊接路径模拟教学可以大大减少人工现场机器人教学的工作量,可以降低生产成本,提高机器人焊接位置的准确性。 使用“任务定义设备”模块中的“设置转数”命令,应该自动教导机器人焊接轨迹,以消除机器人手臂的奇怪动作,如图7所示。
此外,如果自动示教校正后仍然存在一些问题,可以通过示教面板调整机器人的运动路径和焊接位置,以及焊枪的角度,再次编辑焊接点的增加或减少, 机器人,导轨,定位器和其他机构的运动,避免焊接过程中各种组件的干扰,并最终优化焊接路径。
图7机器人教学示范
4.3干扰分析
图8干扰分析
建立播种机框架焊接工作站的3D模拟模型时,应进行分析,分析工作站中的机器人与工件之间,机器人与夹具之间,夹具与工件之间以及其他之间的干扰。 在工作站的仿真过程中,打开干扰分析功能,如图8所示,当出现干扰问题时,系统会通过此功能在系统中出现红色警告干扰点,然后可以将干扰点快速定位到 调整焊接机器人的姿势,焊枪的角度,定位器的旋转以及其他方法以纠正焊接中存在的问题。 干扰分析数据可以生成XML(可扩展标记语言)报告,为相关人员进行查询提供了方便。 经思想测验,认为在模拟焊接机器人工作站时没有碰撞,可以纠正。
4.4人机工程学分析
通过人体工程学设计和分析模块,抓取定义良好的3D工人模型并放置工件,模拟行走速度和路线,工件夹紧姿势等工作,可以验证操作空间的合理性,工作高度的舒适性以及 然后决定最佳步行路线。 通过可视性分析,我们可以捕获实时的工人视觉,从第一人称视角找到盲区,从而优化相应的工作站设计,解决工人在实际操作中的不便之处,并消除潜在的危险。 最终,它可以标准化工人的行动,使工人的工作更加具体和具体,并为工人提供配额参考。
5 结果输出
在完善并确定了播种机机架焊接机器人工作站的过程之后,我们可以使用甘特图比较模拟生产量并确保其满足设计要求,最后输出机器人的脱机程序。
5.1确定生产量
通过甘特图,可以获得每个流程的开始时间,顺序顺序和生产周期的时间。 根据计划方案,甘特图显示,播种机机架焊接机器人工作站的生产节拍为592 s,比理论值734 s短,但符合设计要求,如图9所示。
图9工作站生产的甘特图
5.2导出离线程序
图10机器人离线程序
进入“机器人脱机编程”模块,单击“创建机器人程序”命令,然后分别在两个机器人上对离线程序进行编码。 本文选择的是Fanuc Ltd.的弧焊机器人,在窗口底部可以在“ Change Downloader”栏中切换Fanuc Ltd.的机器人语言,该程序可以导入到机器人控制器中进行运行,现场更换 同步教学程序,优化焊接过程并提高工作效率。 如图10所示。
6 结论
本文介绍了2MBJ系列播种机的焊接机器人工作站设计,应用DELMIA数字仿真软件对工作站进行了仿真分析,优化了焊接工艺,获得了机器人的最佳安装位置,消除了干扰区域,规范了工人的工作 从而使工作站的焊接工艺更加可行,保证了播种机机
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238846],资料为PDF文档或Word文档,PDF文档可免费转换为Word

