英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
新型少齿差行星齿轮传动装置的动力学特性分析与试验研究
Chao Huang*, Jia-Xu Wang, Ke Xiao, Min Li and Jun-Yang Li
重庆大学机械传动国家重点实验室,重庆,400030,中国
2011年11月1日修订稿;2012年11月14日修订;2013年1月9日
-------------------------------------------------------------------------------------------------------------------------------------------------------------------------
摘要
针对内啮合少齿差行星齿轮减速器(PGSTD),本文提出的动态特性分析。首先,静态有限元(FE)分析进行检查的结构强度与齿轮齿的应力分布。其次,通过动态接触有限元法,得到了齿网的内部动力激励,包括啮合刚度激励、传动误差激励和啮合冲击激励。根据建立的模型进行动态有限元模态分析,固有频率和振型行星齿轮装置(PGA)计算,其结构的动态响应和加速度噪声与内部和外部激励的综合研究。最后,噪声和振动测试的PGA利用振动试验设备进行。结果证实,预测值与实验结果是一致的。
关键词:行星齿轮;小齿数差;齿轮动力学;动力特性;噪声和振动。
-------------------------------------------------------------------------------------------------------------------------------------------------------------------------
1.介绍
内啮合少齿差行星齿轮减速器驱动是一种新型的具有许多优点:传动效率高传动比齿轮传动式,结构紧凑,重量轻,范围广,承载能力高,等内啮合少齿差行星齿轮减速器可以在大量的实际应用中以普通的多级齿轮的地方。因此,它已引起国内外广泛关注。众所周知,在实际应用中,不良的动态行为可能出现在齿轮装置包括固有频率和振型行星齿轮装置,造成不可接受的性能特性,如噪声和振动,这不仅恶化了工作环境,同时也降低了耐久性和机械系统的可靠性。实际上,它们与齿轮啮合变形对齿轮的动力学行为有着密切的关系。因此,动态响应的预测是更好的齿轮装置设计的关键。基于非线性振动理论的齿轮系统动力学特性研究已进行了广泛的研究。
张某等开发了一种多度的齿轮耦合的转子-轴承系统的自由动态模型,其中非线性和时变啮合刚度、相关反应,分离,抛光,背面和双面影响齿轮副之间进行综合考虑。然后,系统的动态响应进行数值积分的影响。孙某等提出了在时变啮合刚度考虑行星轮系的非线性动力学方程的公式计算;采用Broyden算法求解相应的非线性代数方程组,而非线性频率响应特性具有间隙的行星轮系采用该方法得到的。最近,张某等分析了少齿差考虑变形如环板、高速轴、齿轮减速器环板的变形协调条件,轴承和偏心套的误差。然后一个弹性动力学模型相结合的集总参数法和有限元方法。最后,在单和双输入条件下的减速器模式的特点下,通过求解传动系统的弹性动力学方程预测的负载状态。
C. Spitas和V.Spitas 已经广泛地对齿轮几何运动建模,齿形误差,动态,磨损和热传递进行了研究。此外,在他们的应用程序中,用行星齿轮的动态分析分析机构的消除噪声和振动问题是必要的,因此,在最近几十年中,行星齿轮动力学建模已受到广泛关注。在这些研究中,齿轮动力学模型为自由为1的扭振模型扩展了三维(3D)有限元模型。主要的模拟仿真数据依靠刚体集总参数模型的配合齿吸收集总刚度。此外,相当多的研究提出的集中参数模型来预测行星齿轮组的自由振动和受迫振动特性。同时,为了测试出行星齿轮的复杂的动态响应,有限元分析是结合文献叙述的齿轮接触分析。这些研究能计算出复杂的行星齿轮的效率的分析,并研究了设计参数对系统动态响应的影响。
尽管事实上,行星齿轮传动的研究领域已从静力弹性动力学演化而来,很少有文献对多齿啮合的影响,时变啮合刚度、静态传动误差、和不平衡对少齿差行星齿轮传动系统动态响应的质量进行综合考虑。为了减少变量的激振,在少齿差行星齿轮传动系统啮合时的激振力和质量不均衡的激振和更好地控制噪声和振动,对开展改进对少齿差行星齿轮传动系统的设计和非线性动态性能的研究具有重大意义。
由以下分析可知,在齿轮-转子-轴承复合系统双级齿轮传动的基础上,行星齿轮传动系统的变形和应力状态是通过用三维动态接触有限元法分析从多体接触力学和结构动力学。此外,对行星齿轮传动系统的内部和外部激励进行了系统的研究。有限元分析对行星齿轮传统系统模态分析采用模态叠加法揭示齿轮系统的内部激励力和不平衡惯性力的动态特性;同时,对行星齿轮传动系统的加速度噪声进行预测。最后,噪声和行星齿轮传动系统的振动测试执行的结果与理论计算值比较,验证了理论分析的正确性。这些结果可以作为少齿差行星齿轮传动系统结构改进以提高动态性能和降低噪声和振动的依据。
- 结构原理
2.1 系统参量与结构模型
在少齿差行星齿轮减速器的基础上,参数的改进需要达到的要求是,减少率为160,最大直径尺寸在110毫米以内;此外,该偏心轴的内孔直径超过26毫米,以确保电机轴的安装。行星齿轮传动系统的改进的参数见表1。
表1.行星齿轮传动系统的齿轮参数。
|
齿轮参数 |
输出齿轮 Ze |
双联齿轮 Zd / Zc |
固定齿轮 Zb |
|
模数m (mm) |
1 |
1 |
1 |
|
齿数 Z |
50 |
45 / 48 |
53 |
|
压力角 alpha; (°) |
20 |
20 |
20 |
|
变位系数 halowast; |
0.55 |
0.55 |
0.55 |
|
顶隙系数 clowast; |
0.25 |
0.25 |
0.25 |
|
齿顶圆直径 da (mm) |
48.9 |
46.1 / 49.1 |
51.9 |
|
齿根圆直径 df (mm) |
51.6 |
43.4 / 46.4 |
54.6 |
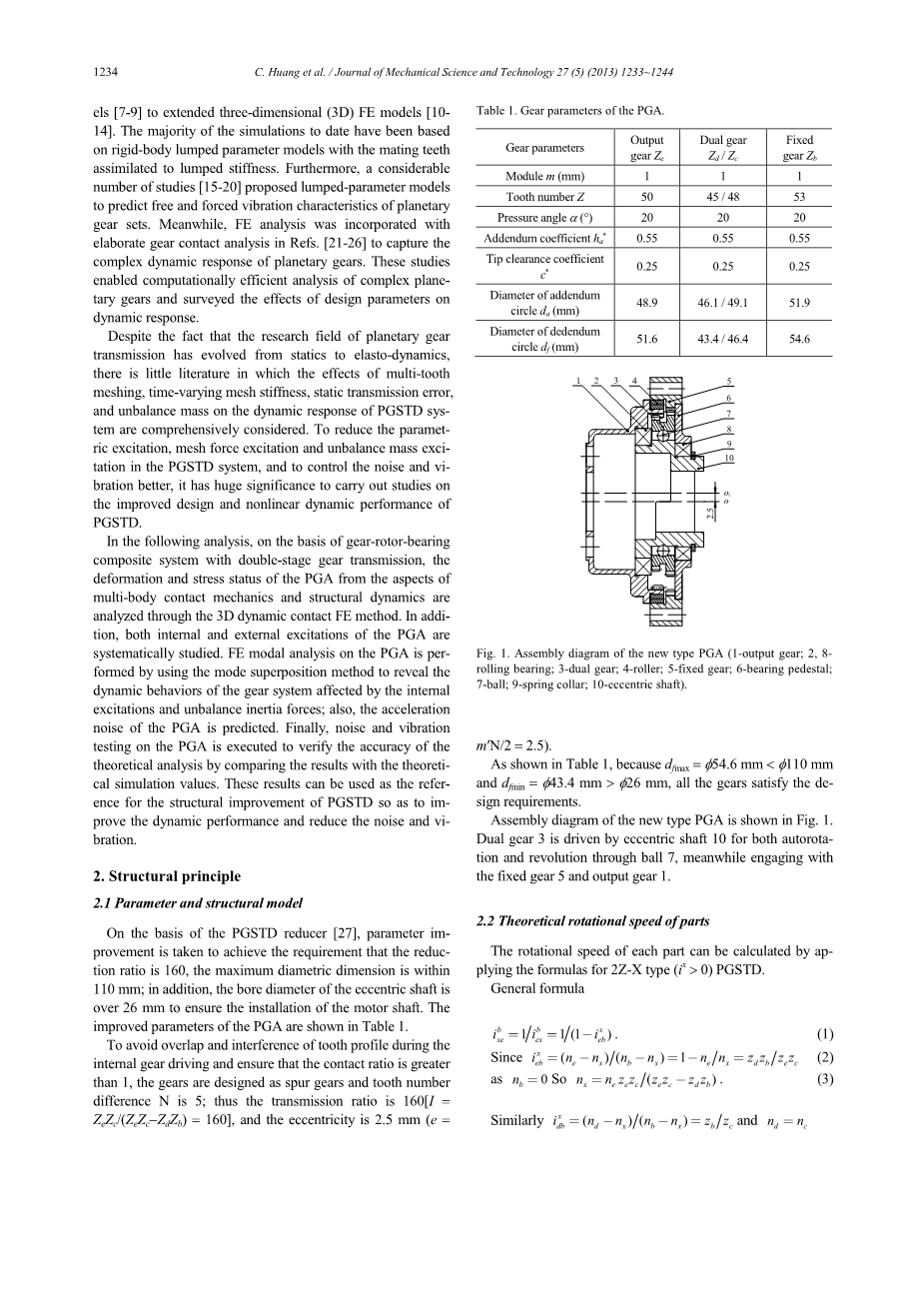
图.1.新型的行星齿轮传动系统的装配图(1-输出齿轮;2,8-滚动轴承;3-双联齿轮;4-滚轮;5-固定齿轮;6-轴承座;7-球;9-弹性垫圈;10-偏心轴)。
为了避免重叠和齿形干涉 内部齿轮传动过程中确保重合度大于1,齿轮设计为直齿圆柱齿轮和齿数差是5;因此,传动比为160 [I =ZeZc/(ZeZcminus;ZdZb) = 160], 偏心率是2.5 mm (e =m′N/2 = 2.5).
如表1所示,因为dfmax =phi;54.6毫米lt;phi;110毫米和43.4毫米dfmin =phi;gt;phi;26毫米,所有齿轮均满足设计要求。
新型的行星齿轮传动的装配图如图1所示。双联齿轮3是由偏心轴10通过7球的自转和公转驱动的,同时与固定齿轮5和输出齿轮1啮合。
2.2零件的理论旋转速度
2Z-X型 (ix gt; 0)的少齿差行星齿轮传动系统的每个齿轮的转速可以通过公式计算.
通式:
- 静态有限元分析
3.1模型分析
在有限元分析中,采用HyperMesh网格软件生成以20节点六面体单元组成的各齿轮啮合状态模型。所有的齿轮啮合都采用映射网格划分方法,除了偏心轴啮合采用自由网格划分方法;同时,对齿轮轮齿的啮合区域的网格再进行细分。同时,在计算效率时一些过渡结构被忽略,如倒角、圆角和工具都被忽略。有148704个实体单元和325189节点全在这模型中;重要齿轮的啮合模型如图2和3所示。
图.2.双联齿轮模型
图.3.固定齿轮模型
表2.主要部位的位移约束
|
部件 |
位移约束 |
||
|
径向 |
轴向 |
切向 |
|
|
偏心轴 |
radic; |
radic; |
|
|
双联齿轮 |
radic; |
||
|
固定齿轮 |
radic; |
radic; |
radic; |
|
输出齿轮 |
radic; |
radic; |
|
在静态分析中,在径向、切向和轴向的位移约束的定义如表2所示。此外,对齿轮齿之间的啮合关系和人工载荷进行定义。
接触对是分别由双联齿轮Zc和固定齿轮,双联齿轮Zd和输出齿轮形成的。在偏心轴的输入端应用了1.25Nm的正扭矩,而在输出齿轮的外端施加负载扭矩200Nm。
3.2分析结果
位移场和应力场可以通过对行星齿轮装置的静态有限元分析得到。主要部件的等效应力值见表3。综合位移和等效应力等值线分别见图4和5。
表3.主要部件的等效应力值(MPa).
|
结果 |
行星齿轮传动系统 |
Eccentric shaft |
双联齿轮 |
固定齿轮 |
输出齿轮 |
|
等量应力 |
996.51 |
30.769 |
996.51 |
687.37 |
985.27 |
图.4.综合位移等值线图。
图.5.等效应力等值线图。
如表3和图5所示,等效应力的最大值出现在双联齿轮与输出齿轮啮合齿的根部。双联齿轮和输出齿轮的等效应力值都比较大。
齿轮材料为Cr17Ni4Cu4Nb钢、在特定的热处理工艺后(1040℃,水冷,480℃,回火4小时,空气冷却),其屈服极限为1275 MPa(sigma;S)。由于[sigma;] =sigma;S / NS = 1275 / 1.2 = 1062.5 gt;sigma;max = 996.51mpa,所以各部分的应力在安全允许范围内。
- 激振分析
在齿轮传动系统中,主要有2种激励导致噪声和振动。一种是齿轮啮合的动态激励,是一种内部参数激励。其主要原因包括齿轮的弹性变形、齿形加工误差引起的啮合齿数变化和非同轴安装、齿冲击力和传动误差的变化。这种动态激励主要出现在响应波谱的啮合谐波,因为它的频率是直接关系到齿轮啮合的时间周期。
另一种比啮合谐波的频率更低的动态激励表现在轴上的外加动载荷。引起这种激励的原因包括齿轮和轴的质量不平衡和几何偏心,发动机和发动机的驱动链的动态负载,负载条件下的转速和转矩的波动,以及相关部分的激励特性,如轴承时变刚度。在这些因素中,由质量不平衡产生的惯性力和离心力会引起齿轮系统的转子耦合问题,这是一个动态的耦合问题。在啮合过程中,引起较大的周期性误差的几何偏心涉及到在激励系统中的位移形
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[147903],资料为PDF文档或Word文档,PDF文档可免费转换为Word

