英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
磁场定向谐波电流注入法对非正弦反电动势永磁同步电动机效率改善程度的评估
摘要:20世纪70年代以后,能源效率再次崭露头角,随着美国联邦政府的资金刺激这一政策的实施,美国对能源效率加强监管。而且,这是一个正确的时刻来重新审视各种控制策略。能源效率对无刷直流电机的影响在高容量应用中有自己的优势,这项研究考虑了非正弦反电动势的无刷直流电机,也调查了在正弦,方波和非正弦谐波电流的电动机的性能。通过完善这项研究,得出的三种普遍激发机制的反电动势的解析式强调了脉动转矩的影响,以及定子铜的丢失导致效率变化的评估。为了实现非正弦电流注入,以可测量的无位置传感器领域为导向的矢量控制系统被应用到非正弦坐标转换之中,用自适应滤波技术识别出了电机中的反电动势调波。实验结果显示在驱动传到之前只有在低频率范围内使用非正弦电流注入是有利的,在算法被修改成正弦电流注入后,定子电阻的损耗比电机中铁的损耗要多,因此保持高效运转的状态。
1.简介
三相无刷直流电机非正弦反电动势如图一所示是定子的绕组函数,定向磁场,定子槽的数量和斜交[ 1 ]。这些电机在诸如商业压缩机,涡轮,电扇和水泵等变速驱动的应用中是强大的竞争者。它们通常被方波电流所控制,用霍尔感测器使方波电流与反电动势结合在一起。[ 2-3 ]方法很简单,划算,在行业中很受欢迎。由方波电流控制而引起的相关问题是换相和谐波转矩脉动,通过将谐波电流注入到电机里[ 3-13 ],这些问题首次被提出。对于上述的应用,转矩脉动或许是一个主要问题,因此在商业产品线申请这些复杂的控制系统的动力是微乎其微的。但是,最近,效率在高容量应用中发挥着重要的作用[ 25 ]。
正弦波和方波电流注入技术的集中绕组永磁无刷直流电动机的影响已经在[ 4 ]在弱磁运行机制而不诉诸非正弦电流注入的主要重点研究。在[ 5 ]中基于查找表的形式反电势综合算法优化了注入电流以减小转矩脉动和定子电阻损耗不因此声称最大效率在给定转速范围。有了类似的目标,忽略在更高的速度运行的铁损失,参考[ 6 ]可获得的各种电流的解决方案。
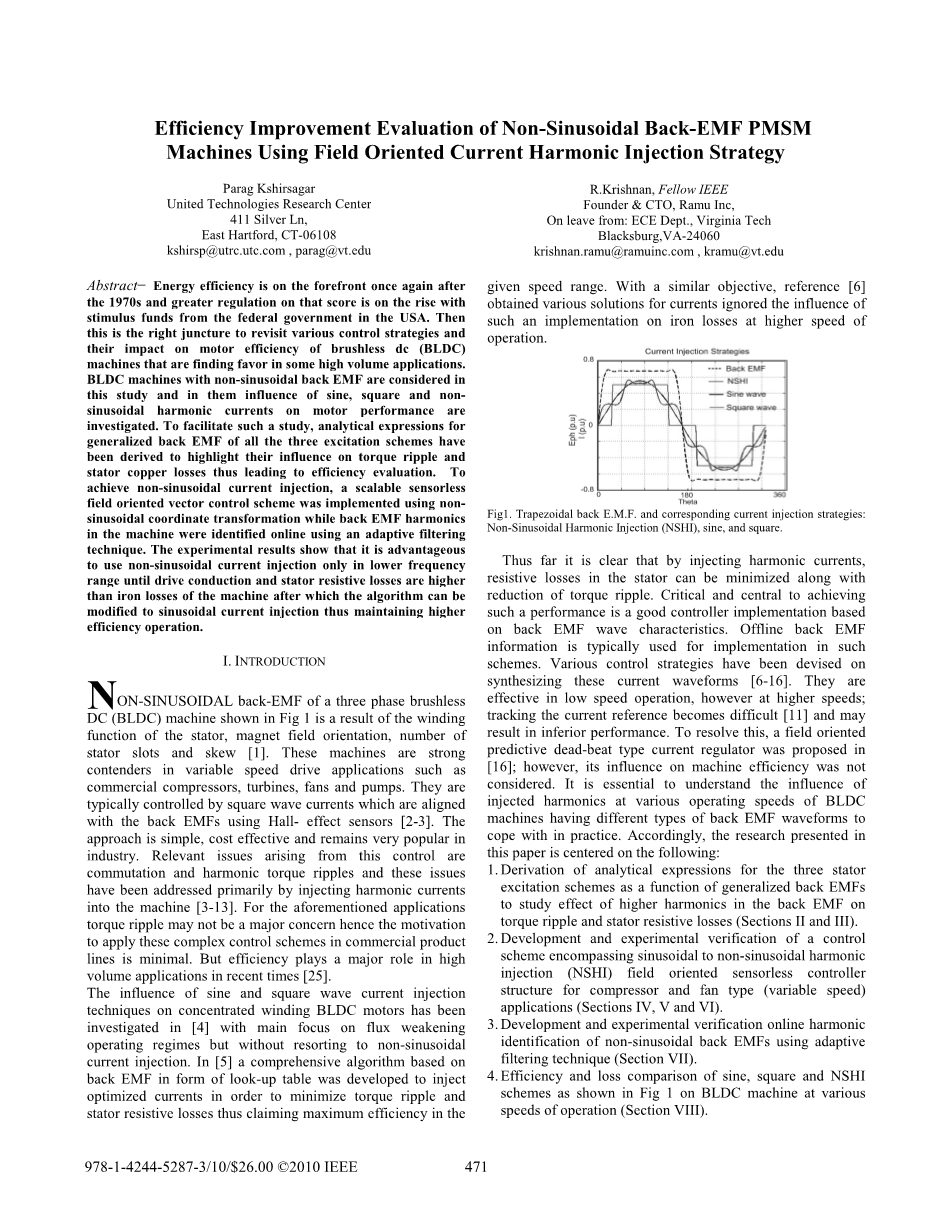
图1.梯形反电动势和相应的电流注入方法:非正弦谐波注入(非正弦谐波电流)、正弦波、方波
已经研究了正弦和方波电流注入技术对密集绕组无刷直流电机的影响,凭借聚焦于磁通降低操作体制,并没有凭借非正弦电流注入。给出了基于反电动势的以查表法的全面算法来注入优化的电流,来减少转矩脉动和定子电阻的损耗,从而要求在给定速度范围内保持高效。有类似的目标,参考得到的各种应对电流忽略了铁以更高速度运行的损失这一解决方案。
现在为止,很明显的是通过注入谐波电流,在定子中电阻损耗随着转矩脉动的减少也减弱了。实现好的性能的关键就是基于反电动势波形特征的好的控制器的实施。线下反电动势信息在体系中被实施。已经想出了各种关于波形电流合成的控制策略。他们在低速运转中有效率,然而,在较高的速度运转中,追踪电流参数就困难了,可能导致性能变差。为了解决这一问题,开拓了以预测死区型电流调节器为导向的新领域,然而,它的影响对电机的效率并没有被考虑在内。在无刷直流电机变速条件下,了解注入的谐波电流很重要,实际上,需要处理反电动势的不同形式的问题。因此,论文上的调查主要是以下几点:
1.作为具有普遍反电动势功能的三种定子励磁方案解析式的推导来研究关于转矩脉动和定子电阻损耗的反电动势的高谐波的效率。(二三部分)
2.一种控制方案的开发与实验验证以正弦与非正弦谐波注入领域为导向的压缩机和风扇的无速度传感器控制结构。(四五六部分)
3.开发和实验验证,用自适应滤波技术在线谐波识别非正弦反电动势。(七部分)
4.在变速运转下,无刷直流电机的效率和正弦,方波和非正弦谐波注入方案的损失比较如图一所示。(八部分)
2.非正弦电机的反电动势
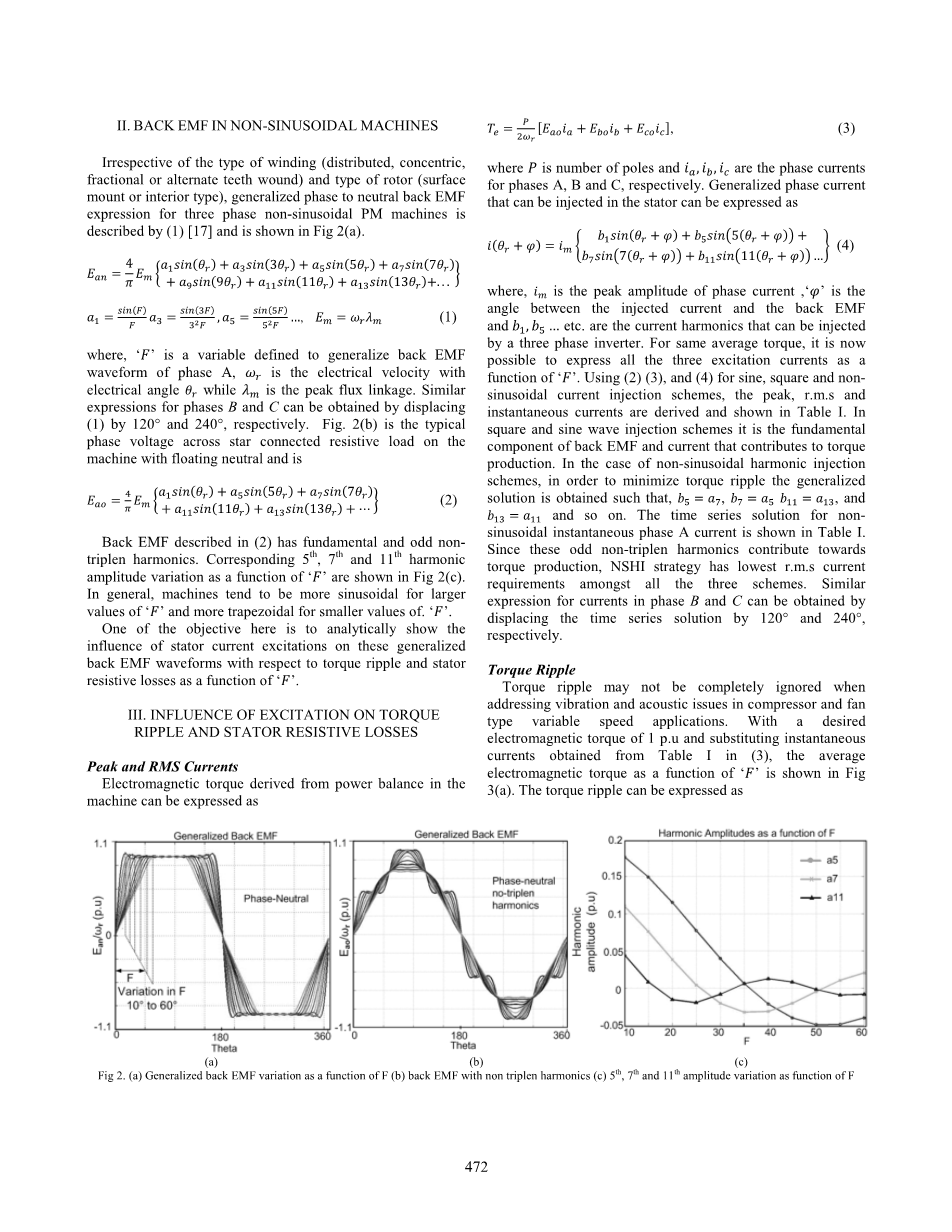
不同类型的绕组(分布、同心、分数或替代牙齿的伤口)和转子类型(表面贴装或室内型)、三相非正弦永磁电机的反电势对中性表达广义相位是描述(1)[ 17 ],如图2所示(a)
其中,lsquo;rsquo;是一个变量定义的概括反电动势波形的相位. 是角度为 的角速度,是峰值磁链。类似的,阶段B和C表达式获得分别取代(1)120°和240°。图2(b)是一种典型的三相电压,在星载电阻负载上,在电机上具有浮动的中立性.其表达式是
在(2)中,反电动势的描述具有基础性。图2(c)所示为第5、第7和第11次谐波幅值变化的函数。在一般情况下,电机趋于lsquo;Frsquo;的正弦值越大导致lsquo;Frsquo;的梯度越小。
这里的目的是分析显示针对转矩和定子电阻损耗作为一个函数的广义的反电动势波形,定子电流激发对这些影响。
图2.(a)广义反电势的变化作为一个功能的F(b)非谐波反电势(c)第5、第7和第11变幅的函数f
3. 激励对转矩脉动和定子电阻损耗的影响
峰值和有效电流
电机的电磁转矩可以表示为
其中P是磁极的数目, ,分别是A,B,C三相的相电流。广义的,在定子中的相电流可以表示为
其中是相电流的峰值幅度,phi;是注入电流的角度。利用(2)和(3)和(4)正弦波、方波和非正弦电流注入方案将瞬时电流的有效值展示在表1中。在方波和正弦波注入方案,它是反电动势和电流的基本组成部分,有助于转矩生成。在非正弦谐波注入方案的情况下,以最大限度地减少转矩脉动的广义解,得到这样的结果:。非正弦电流的瞬时相位的时间序列解如表I所示,由于该危害有助于产生扭矩,非正弦谐波电流策略具有最低有效电流要求的三个方案。在B和C的情况下,将时间序列解的位移分别为120°下和240°下,可以得到类似的电流表达式
表1 各种电流激励的表达式
转矩脉动
在压缩机和风机的变速应用中,转矩脉动在解决振动和声学问题时可能不会完全忽略。
与所需的电磁转矩和替代瞬时电流从表1中得到(3),平均电磁转矩作为功能F如图3(a)所示。转矩脉动可以表示为
这里是瞬间转矩的最大值 和瞬间转矩的最小值的平均转矩的值。
图3( b )所示,转矩脉动的方波波形电流注入低于5%,随着反电动势逐渐增加成为正弦后“F” 少于35度。对于方波波形注入,由于电流有限的上升时间,转矩脉动是可以忽略的。如果非正弦电流和转矩脉动低于5%,只有“F” 在35度至45度之间,反电动势跟正弦相比之下,F是变值,非正弦的激励使转矩脉动低于5%,因此以一个转矩脉动缓和的观点来看,这证明了它在正弦和方波注入方案所占的优势。
损耗
为了提高效率,比较在驱动系统注入电流所造成的多种损耗是很重要的。在这一方面,电机的主要损失可以是定子铜或铁,这取决于功率水平和运行速度,而逆变器主要是传导损失[5]。
- 定子电阻损耗率
定子阻损耗率是从表I电流的方波率得出来的,如图4所示,三种注入方案的定子阻损耗率。正弦和非正弦激励比方波波形激励至少少9%的损耗。据显示,“F”低于30度,非正弦谐波注入方案比正弦注入方案少些损耗。由于同样的平均转矩的产生的电流需求较低,因此这是初级的。可以推断为,变换器传输损耗就铜损耗在非正弦谐波注入方案的减少比例而减少。
(b) 铁损耗
铁的损失是一个电机速度的函数,并假设一个风扇电机转速可以从50%到100%的额定转速变化,铁损耗的定性观点很重要。从谐波电流输入观点来看,当正弦流量密度导致最低的铁损耗时,方波波形发动机流量密度有高次谐波导致最低的定子铁损耗。对于各自的方波波和正弦电流,在定子的谐波电流中这同样是正确的。随着注入的谐波振幅而定,非正弦谐波注入方案的铁损耗处于这两种方法中。影响正弦,方波的铁损失非正弦谐波电流方案将在八部分实验结果中使用。
图3. 三种注入方案的性能比较分析 (a)平均转矩(b)转矩脉动(c)定子电阻损耗比。
4. 非正弦电流的闭式解
非正弦反电动势的傅里叶级数和表中所列的非正弦瞬时电流也可在表2中给出的封闭形式表示。
表2. 反电动势和电流的封闭形式表达式
其中是A,B,C阶段的反电动势。
mu;和ε是具有周期性的变量,并且是转子位置的函数,电机的输出功率是
简化
方程(7)可以用力矩表示峰值磁通和电流峰值:
当(8)中所有的变量都是常数时,这个表达式证明了非正弦电流的解决方案产生的脉动转矩。上述结果是特定的磁链谐波补偿没有考虑通道和齿槽的影响。表2所示的电流公式是控制器实施ABC的关键推动者,两相静止,或转子的同步参考框架。自美国广播公司和两相静止参考帧的实现有已知的限制,目前的控制器的带宽[ 11 ],在转子参考帧的实施将被认为是今后的方向。
5. 非正弦坐标变换
坐标变换的目标是从这些非正弦电流通过适当旋转参考帧和相对于转子位置归一化电流矢量的大小和实现已开发变量时间不变[ 12 ]。与传统的参考帧的方法相比,该坐标变换需要2个变量,除了转子位置,图4(a)所示振幅的kappa;的摄动和(b)的位置/相位的micro;扰动。参考图4,在变量变换的时间是通过以下步骤来实现的
1, 将非正弦电流转换为双相稳定的参考帧,使电流矢量彼此正交。
2, 然后参考帧相对于转子的位置和位移旋转给出了使沿直轴电流为零,而电流I沿轴变化的幅度。
3, 获得转化的kappa;和计算(5)
4, 图4给出了应用的转变,当前变量转变为直流变量q轴电流的大小而有距d轴电流为零。
5, 由于电流注入功能的反电动势的坐标变换需要的变量kappa;在线计算和micro;”。
图4. 基于电流的非正弦坐标变换
因此,对于一个给定的电机模型,
其中
是每相适用的定子相电压矢量,
是产生的定子相电流矢量,
是在机器中的相位磁链的向量,
L是电机的电感矩阵
是转子的角速度。
定义
作为每相定子电阻,
作为每相定子的自感,
作为一个相位的磁通的峰值,
在步骤1-4解释了应用转化,相应的转子参考框架模型[ 12 ]是
图5. 磁场定向的无位置传感器控制策略采用变量kappa;和micro;和theta;
6.非正弦磁场定向控制
开发一种简化的可缩放传感器非正弦谐波电流矢量控制策略如图5所示来研究定子领域刺激的影响。控制器仿照(10)所设计。如图6所示,对于同流控制器频带宽度,非正弦谐波电流比应用于[14]的方法性能好一些。
全阶状态观测器和[18]调谐过程用于无位置传感器旋转体位置估计。观察者意在对电流的基本频率的影响。不连续脉冲宽度调制(DPWM)方案应用于最大限度地提高直流母线,利用和减少逆变器的开关损耗。在图5中,阴影部分表示辅助码实施的一种传统的正弦电流控制器。以一个更快的操作速度,lsquo;micro;rsquo;和lsquo;kappa;rsquo;夹紧块把值限制到0和整体促进从非正弦谐波电流方案到传统正弦领域为导向的控制方案的转化。为了估计lsquo;micro;rsquo;和lsquo;kappa;rsquo;,如(5)所示,通过试运行阶段,该实施需要电机反电动势的优先估计。预估反电动势谐波的步骤在下面部分有所解释。
图6. 实验结果:电流控制器700转比较非正弦谐波电流和700Hz电流控制带宽。
7.在线谐波识别
本节介绍了在该电机的启动和调试阶段实时反电动势的傅立叶系数的识别。
一旦确定在这个阶段的系数,它们可以被用来重建后的反电动势信号在正常的电动机操作。在线反电势谐波系数检测的结构如图7所示。这种类型的信号重构技术是众所周知的,在有源电力滤波领域,并已在[ 19 ]被证明。从(2)了解反电动势的特性,在图7中所示的估计被运用于只有根本和奇非三倍次谐波。
图7. 反电动势谐波估计算法
参考信号在两相静止的参考框架中计算为
这里和是在两相静止的参考框架中相应的测量电压和电流。
估计的反电动势的傅里叶系数更新每个采样间隔T收敛到相应的真正的谐波系数。在图8中,傅立叶系数收敛到其相应的谐波幅度小于5个周期。
图8. 仿真结果:反电动势中傅立叶系数的跟踪
图9实验结果表明稳态重建反电势信号没有切换由于逆变器的非线性波动和第六谐波含量
图9. 在空载条件下,实验结果稳定状态的计算,离线测量和在线估计反电动势
8.实验
有两台电机1和2,用不同的反电动势的配置文件和它们不同的谐波频谱来评估效率的改善。如图10所示。与电机2相比,电机1的反电动势在第五、第七、第十一、第十三次谐波中不到5%,因此,电机2有9.2%的行为类似于正弦反电动势第五谐波含量,这也是形似梯形反电动势的根本原
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146657],资料为PDF文档或Word文档,PDF文档可免费转换为Word

