
英语原文共 17 页,剩余内容已隐藏,支付完成后下载完整资料
基于参数图谱通过统计学的统计参数优化方法提出了一种新型三维混合机械臂参数优化方式。根据机械臂的运动学和力学分析,提出并讨论了若干运动学和力学性能评价指标。考虑到装配技术,制作了三自由度混联机械臂的样机,为三自由度混合机械手臂应用提供依据。新型三自由度混合机械臂可以适用于现代工业领域要求高刚度、惯性小、工艺性好的条件。建立了一个新的6-DOF拟人机械手臂,与目前的球面三自由度机械臂相关联。
一种新型3-DOF混联机械臂设计
李延彪1,2dagger;,金振林1 amp;季世明2
1机械工程学院,燕山大学,秦皇岛066004,中国
2机械制造与自动化重点实验室,浙江工业大学,杭州310014,中国;
关键词:三自由度混合机械臂运动学分析,参数评估,参数优化
1介绍
机械臂包括串联、并联和混合结构。串行机械臂具有移动灵活,工作空间大等优点,赵[1]开发了TH1型机械臂,森田[2]开发了温迪手臂,ABB[3]开发了IRB系列机械臂。
并联机械手具有结构简单、低惯量、高载荷能力[4,5]。瑞士SIG公司开发了高速的xr22型并联机械手,黄[6]建立了一个可以高速运行的二自由度并联机器人,金[7]提出的4自由度并联机械臂。
混合机械手中如七自由度机械臂采用高[8]提出的拥有以上所有优点的混合结构。
参数优化是机械臂[9-11]的设计基础,选择出可实现对机械臂性能优化的适当参数非常困难。因此,通过直觉和经验进行参数的优化是远远不够的。目前,主要有多目标参数优化和单目标参数优化两个途径。前者的目的在于设计单性能。苏[12]通过运用目标函数的灵敏度,来优化斯图尔特平台;李 [12]采用工作空间为目标函数优化了一个三足虚拟机床。这些方法不考虑其他性能。多目标参数优化采用多个性能参数为目标函数来优化机械手的参数。斯托顿通过选择工作空间和灵敏度为目标函数来优化改进的斯图尔特平台;Merlet考专注于工作空间和其他设计目标提出一个优化方法[14],陆[15]利用遗传算法优化斯图尔特平台的参数。
基于人体结构的特点,提出了一种新型三混合机械臂,基于参数图谱优化了其统计参数。首先,基于运动学和力学分析和指标图谱在工作空间参数的分布情况提出了几个运动学和力学性能评价参数和整体性能的评价参数。然后考虑装配技术,基于参数图谱的参数优化搭建了三自由度混联机械臂样机。它对三自由度混联机械臂的应用提供了基础。与以往的系列机械手臂相比,如图1所示,当前臂采用2自由度并联结构为上臂,其中两电机以固定部分相连接来减少移动质量。因此,机械臂具有高负载能力和较低的惯性的优点,适用于人形机器人,精密抛光,航空,造船和汽车行业等领域。
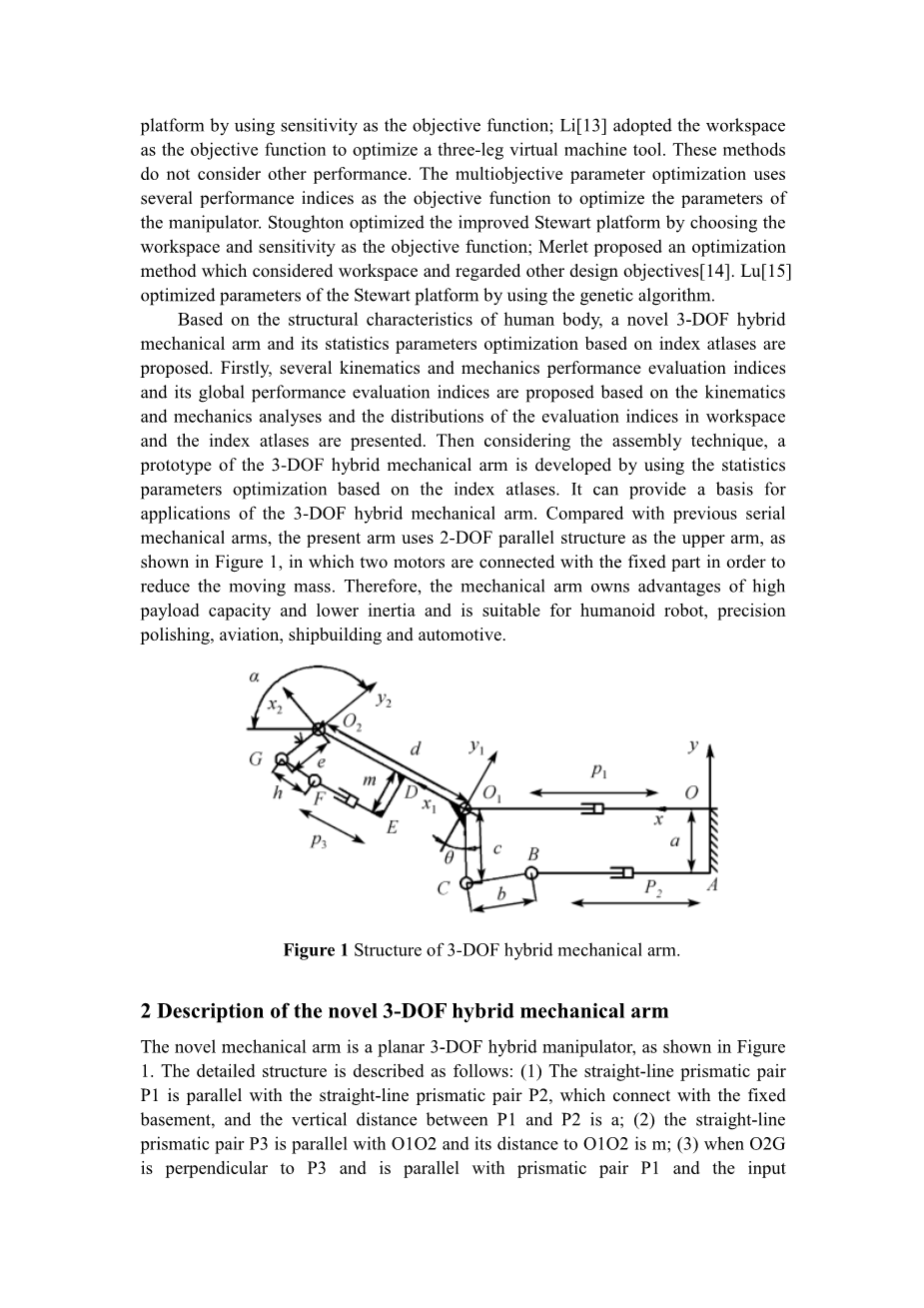
图1 三自由度混合机械臂结构
2新型三自由度混合机械臂的说明
如图1所示,新的机械臂是一种平面三自由度混联机械手。具体结构如下:(1)直线移动副P1与直线移动副P2相平行且与基座相连,P1和P2之间的垂直距离为a;(2)直线移动副P3与O1O2平行,且与O1O2的距离为m;(3)当O2G与移动副P3垂直,与移动副P1平行且三自由度机械臂输入位移为0时,机械臂处于初始安装位置。Li0(i = 1,2,3)是移动副PI(i = 1,2,3)的初始长度。
在目前的机械臂与球面三自由度并联机构相关联的情况下,搭建了一种新型6-DOF混合拟人机械臂[16]。
3逆运动学
如图1所示,建立了空间坐标系:{p}-Oxy,为基础平面,是绝对坐标系统;{Q}-O1x1y1是以下坐标系;{R}-O2x2y2是动坐标系,O2表示为(x y alpha;)T是机械臂的参考点,alpha;是O2的旋转角度参考点,轴Y2沿着O2G。单位向量A,B和O1在{P}可以被描述为
其中∆L1和∆L2分别是P1和P2的输入位移。
在{Q}中C,D,E,F和O2的方位向量可以被表示为
其中∆L3是P3的输入位移,d′是O1D的长度。
在{R}中G的方位向量为
根据机械臂的结构,其逆运动学方程可以描述为
其中theta;1是{Q}绕O1的旋转角度,theta;2是{R}绕O2的旋转角度,phi;1是BC绕B的旋转角度,phi;2是FG绕F的旋转角度,如图2所示。
图2坐标系{Q}和{R}中的旋转角度
逆运动学方程(4)的解为
其中
3.1转动约束
beta;1和beta;2分别是BC和CO1,FG和GO2之间的角度。因此可得beta;1和beta;2
其中sigma;1,sigma;2,lambda;1和lambda;2分别为单位向量沿BC,FG,CO1和CO2的方向。sigma;1=(CPminus;BP),sigma;2 =(GPminus;HP)/h,lambda;1=(O1pminus;CP/c,lambda;2=(O2pminus;GP)/e。beta;1和beta;2的最小角分别为beta;1min和beta;2min,最大角度分别为beta;1max和beta;2max,然后得到了旋转角度
3.2输入移动副的翻译约束
P1,P2和P3最大和最小输入位移的分别为Limax和Limin(i=1,2,3)。然后输入移动副输入的位置约束为
4运动传动的平衡方程
V=(VX VY omega;B)T表示在{P}中O2的速度矢量,它由机械臂末端执行器的提供,v=(v1 v2 v3)T为输入速度矢量,其中vi是Pi(i=1,2,3)的输入速度值。通过P1和P2的驱动,O1的线速度矢量为
在通过时间区分式(4)中第三和第四方程后,{Q}中绕O1的角速度omega;1在{P}中为
然后
其中在O1p和O2p分别是O1和O2在{P}中的方向向量。
在通过时间区分式(4)中第七和第八方程后,{R}中绕O2的角速度omega;2为
然后在P3的驱动下,只有绕O2的角速度矢量为
根据方程(10)—(14),以点O3的线速度和角速度矢量为
其中VB =(Vx Vy)T。根据方程(10)—(15),输入速度和输出速度之间的关系为
其中J Bisin; R 3times;3是机械臂的速度雅可比矩阵,可描述为
其中
5力传递的平衡方程
基座和零件被假定为刚体和无摩擦。F = (FX FY MB)T表示输出力矢量,f = (f1 f2 f3 ) T为驱动力,其中fi(i= 1,2,3)是驱动力在PI的方向(i= 1,2,3)。利用虚功率原理,可以得到f与F之间的关系。末端执行器的驱动力F和导致虚拟位移delta;iota;B;然后输入驱动的虚拟位移应delta;PB。因此,由f总的虚功为
其中
由F总的虚功为
其中
基于虚功原理,总的虚功之和为0
总的虚功与虚拟位移delta;iota;B和delta;PB有关,delta;iota;B和delta;Pb之间的几何约束由JB的运动学雅可比矩阵确定,因此可以得到delta;iota;B和delta;Pb之间的关系
由方程(17)—(22), f和F之间的关系为
其中G B = (J Bminus;1) T 是机械臂的力矩阵。
6性能评估参数的定义
当机械臂不是在特殊位置时,考虑到线速度和角速度之间的差异,式(16)可以改写为
其中JV和Jw分别是前两行向量,JB是最后一行向量。当手臂处于非一般位置时,JB则是辅助矩阵,所以JV可以通过辅助矩阵分解为
其中
其中,在sigma;1V和sigma;2V是JV的特殊值且sigma;1Vge;sigma;2V。因此,为了进行运动学分析,输入矩阵被定义为一个单元矩阵
根据式(24)—(26),可得
其中VX ′ = aB11VX aB21VY , VY′ = aB12VX aB22VY .
式(27)表示一个椭圆[ 17 ],其轴长度是sigma;1V和sigma;2V的倒数。椭圆称为线速传输椭圆。当输入速度是一个矢量单元时,输出线速度VB位于椭圆上。当sigma;1V等于sigma;2V,输出速度位于一个圆上。因为JB随着移动平台的位置而变化,所以需要一个定量指标来评估机械臂的速度传输性能。因此,线速度传输性能参数KV和角速度传输性能参Keta;之间的关系
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146412],资料为PDF文档或Word文档,PDF文档可免费转换为Word

