英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
使用球形五杆的空间自适应手指抓取器机构设计
摘要:提出了一种新型夹具的设计方案采用空间自适应手指,该夹具具有空间特性结构。不像典型的基于链接的欠驱动手,前者只能在飞机上操作,新的夹持器却能做到在平面和空间中的运动。此外,抓手也可以执行由于以前的联动系统输入执行机构的结构导致的不能缠绕的动作。手指设计的灵感来自于人手部掌指关节,其核心理念是球面五连杆机构。本文提出的该机构的原型夹具是用几种夹具组合,进行还将执行抓握不同的对象的试验。
关键词:欠驱动手;空间自适应夹持器;球面5连杆机构
工业领域所需的任务很简单,对于简单的任务,机器人的功能表现是合适的。如今,需要各种各样的功能,因为所要求的任务不仅是工业领域的,而且也可用于日常服务和医疗应用任务,它需要会操作的机器人,能与他人合作的机器人,拥有更好的性能,如双臂机器人。
机械臂是高精度,高速点胶机器手。对应小批量生产方式,提高生产效率。除点胶作业之外,可对应uv照射,零件放置,螺丝锁定,电路板切割等各种工作。而机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
机器人的末端执行器也随机器人的发展而改变。如EVG[1]和Ottobock[2]夹持器是用于简单的任务机器人,还有用于类人功能机械手的研究,包括DLR/击打手部[3]和Robonaut手部[4]。
机械手是用来抓东西的,主要功能为抓手和拟人化,但是每个系统都有几个抓地力的限制。抓地力是有一定限度的函数的自由度其值很低(DOFs),而拟人化的机械手则有相当多的执行机构,可能造成挑战控制方面的问题,而且抓地力运动的成本效率低下。
为了克服上述缺点,a项不足提出了驱动机械手的概念,驱动机械手是指主动关节的数目大于主动关节的数目执行机构。由欠驱动引起的冗余自由度是由机械工具控制的,这样的机构就可以自动适应变成任何形状。
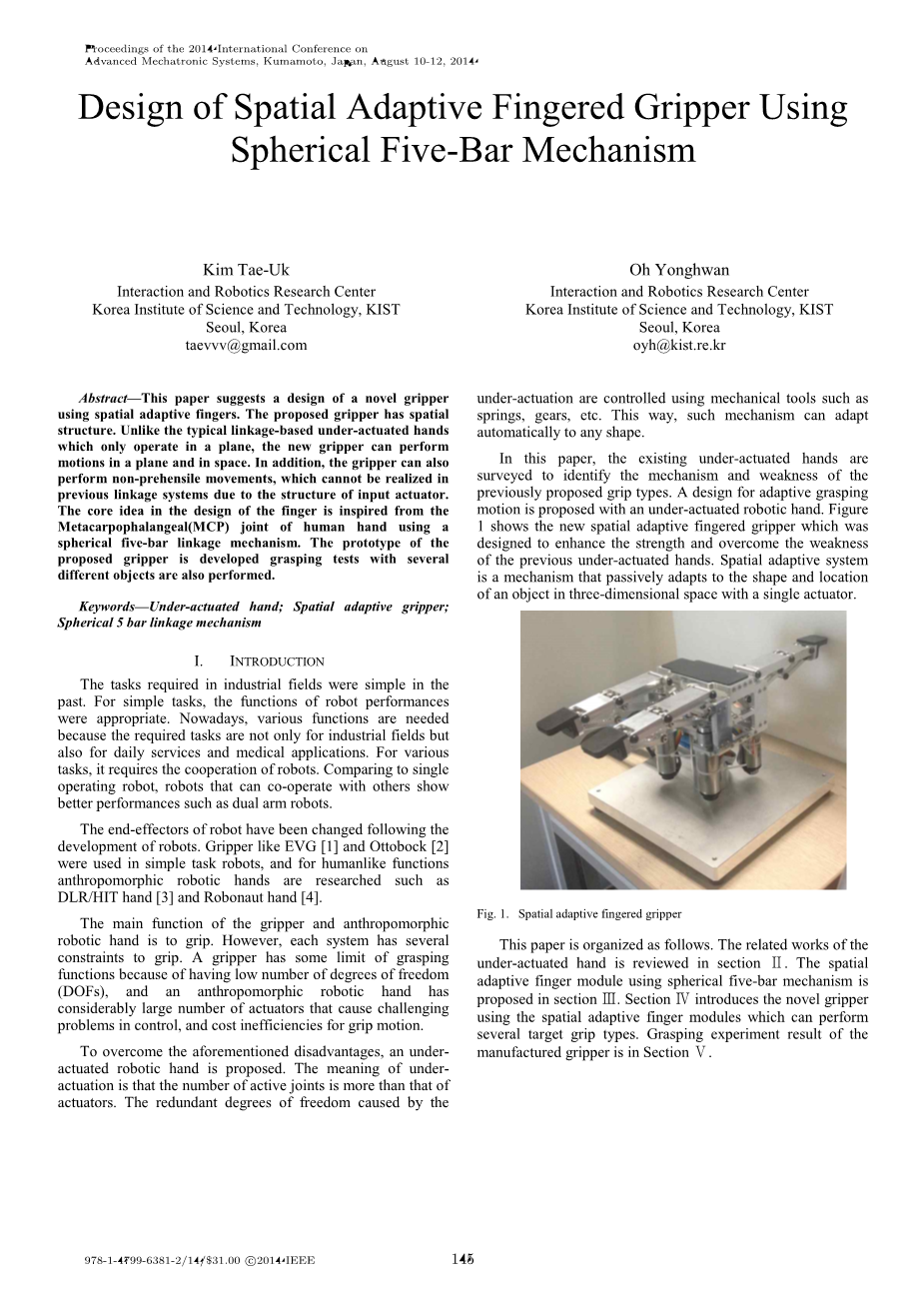
在本文中,现有的欠驱动手是为了调查确定其发病机制和薄弱环节,是以前提出的握持类型。图1展示了一种新的空间自适应手指夹持器,旨在增强实力,一种自适应握持的设计运动是由欠驱动的机械手提出的,克服弱点以前的欠驱动手。空间自适应系统是一种被动地适应形状和位置的机制,在三维空间中,用一个执行器的物体。
图1.空间自适应指爪
图1.空间自适应指爪
|
Name |
数学模型 方法 |
Grip Typea,b |
||||||||||
|
Barret Hand [5] |
3 |
4 |
7 |
离合器分离 |
O |
O |
X |
O |
O |
X |
O |
X |
|
Cyber Hand [6][7] |
5 |
6 |
16 |
肌腱 |
O |
O |
O |
O |
O |
O |
? |
? |
|
H2 Hand [8] |
4 |
5 |
12 |
肌腱 |
O |
? |
O |
? |
? |
? |
? |
? |
|
i-limb [9][10] |
5 |
5 |
11 |
肌腱 |
O |
? |
O |
? |
? |
? |
? |
O |
|
Octopus [11][12] |
3 |
1 |
9 |
肌腱 |
O |
O |
X |
? |
? |
X |
X |
O |
|
Open Hand [13][14] |
4 |
1 |
8 |
肌腱 |
O |
O |
X |
? |
? |
X |
X |
X |
|
Adaptive Gripper [15] |
3 |
2 |
10 |
机制 |
O |
O |
O |
O |
O |
X |
X |
X |
|
RTR2 [16][17] |
3 |
2 |
9 |
肌腱 |
O |
? |
? |
? |
O |
O |
? |
? |
|
SARAH [18] |
3 |
2 |
10 |
机制 |
O |
O |
O |
O |
O |
X |
X |
X |
|
SDM Hand [19] |
4 |
1 |
8 |
机制 |
O |
O |
? |
? |
O |
X |
X |
X |
|
Smart Hand [20] |
5 |
4 |
16 |
肌腱 |
O |
O |
O |
? |
O |
O |
? |
? |
|
SPRING Hand [21] |
3 |
1 |
8 |
肌腱 |
O |
? |
X |
? |
? |
X |
X |
X |
|
TBM Hand [22] |
5 |
6 |
1 |
肌腱,机制 |
? |
? |
? |
? |
O |
X |
X |
X |
|
Delft Hand [23] |
3 |
1 |
6 |
肌腱 |
O |
O |
X |
O |
O |
X |
X |
X |
表1
本文的工作安排如下:部分Ⅱ数学模型是综述.部分Ⅲ提出了空间自适应手指模块采用球面五杆机构.部分Ⅳ介绍了小说爪使用空间自适应手指模块,可执行几种目标抓取类型。抓取实验结果生产钳子Ⅴ节。
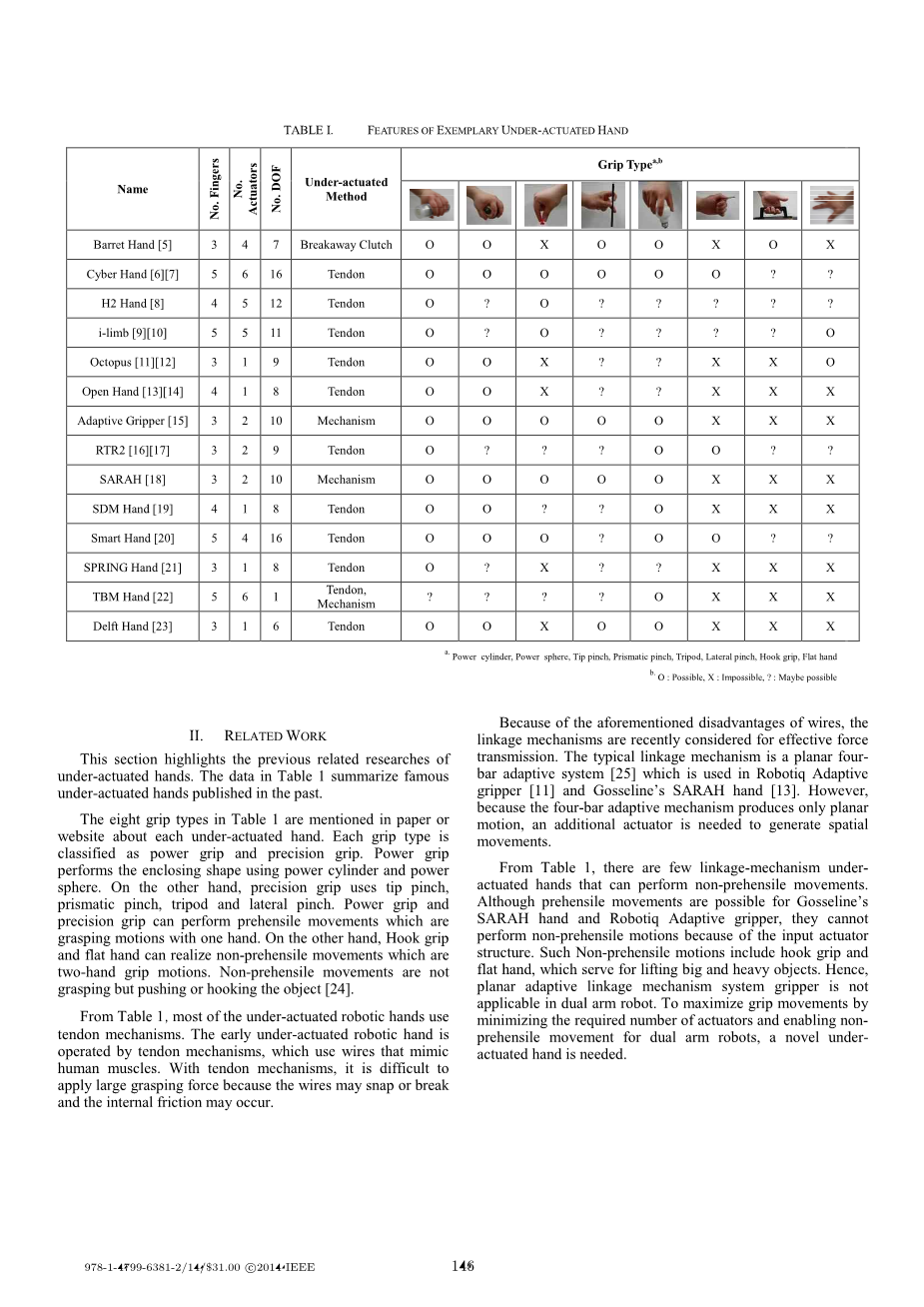
本节重点介绍了前人对表1的数据总结,以及在过去出版过的著名的关于动作不足的手。
表1中的8种握把类型在paper or的网站中提到,每只欠驱动手分握把为动力握把和精密握把。动力握把使用动力缸和动力执行封闭形状,另一方面,精密握柄采用尖端夹紧,棱镜夹头,三脚架和侧面夹头,精密握把可以实现卷取运动、一手抓握动作和另一手勾握而平手则可以实现非卷绕运动、双手握拍动作和非抓握动作,非抓握动作是指不抓住但推动或钩住物体[24]。
从表1中可以看出,大多数欠驱动机械手的使用肌腱、机制。早期欠驱动机械手是由肌腱机构操作,使用模拟的导线人体肌肉。没有有肌腱、机制,是很难做到的使用较大的抓取力,因为电线可能折断或断裂还可能会发生内摩擦。
由于上述电线的缺点,连杆机构最近被认为是有效的传力机构。典型的连杆机构为平面四连杆机构,在Robotiq自适应中采用了bar自适应系统[25]。但是,因为四杆自适应机构只产生平面运动,空间是需要一个额外产生运动的执行机构。
从表1中可以看出,人们用链接机制很少能做非卷握运动的驱动手。尽管缠绕运动对Gosseline莎拉·汉德机器人来说是可能的,但机器人自适应抓手不能输入执行机构,执行非卷绕运动这种非卷绕运动包括钩握和扁平手,用来举起又大又重的物体。平面自适应连杆机构系统的夹持器则不适用于双手臂机器人,它最大限度地提高抓地力,最小化所需的执行器数量,并启用适用于双臂机器人卷取运动的非执行器,是一种新颖需要驱动手的运动方式。
图2手指关节
人类的手指,除了拇指,有三个关节:远端关节指间关节(DIP)、近端指间关节(PIP)、掌指关节(MCP)。DIP和PIP有一个转动关节关节。MCP是一个球形关节。然而,由于没有旋转z轴时,MCP被视为一个只有2个自由度的关节[26]。
MCP关节具有一个2自由度的球形[27],其中绕
全文共9755字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[351],资料为PDF文档或Word文档,PDF文档可免费转换为Word

