单级翻越能力高的爬楼梯轮椅机构的建模
Murray J. Lawn, Member, IEEE, and Takakazu Ishimatsu
摘要 - 在为老年人和残疾人提供流动性的领域,处理楼梯的方面在很大程度上仍未得到解决。本文重点介绍具有高单步能力的爬楼梯轮椅机构的发展。 该机构基于通过动力连杆连接到底座(椅子)的前轮和后轮组,以便允许向前方向的自动楼梯上升和下降,以及诸如直接进出往返的高单步功能。面包车。主要考虑因素是固有的稳定性,提供一种物理上不比标准动力轮椅更大的机制,美观,并且基于易于获得的低成本组件。
索引条款 - 障碍物存在环境,高单步,爬楼梯,轮椅,轮群操作。
- 简介
迄今为止,为行动障碍者提供的主要通用移动辅助设备一直是轮椅。对于户外环境,移动踏板车越来越受欢迎。轮椅的选择是基于
关于用户的身心能力。
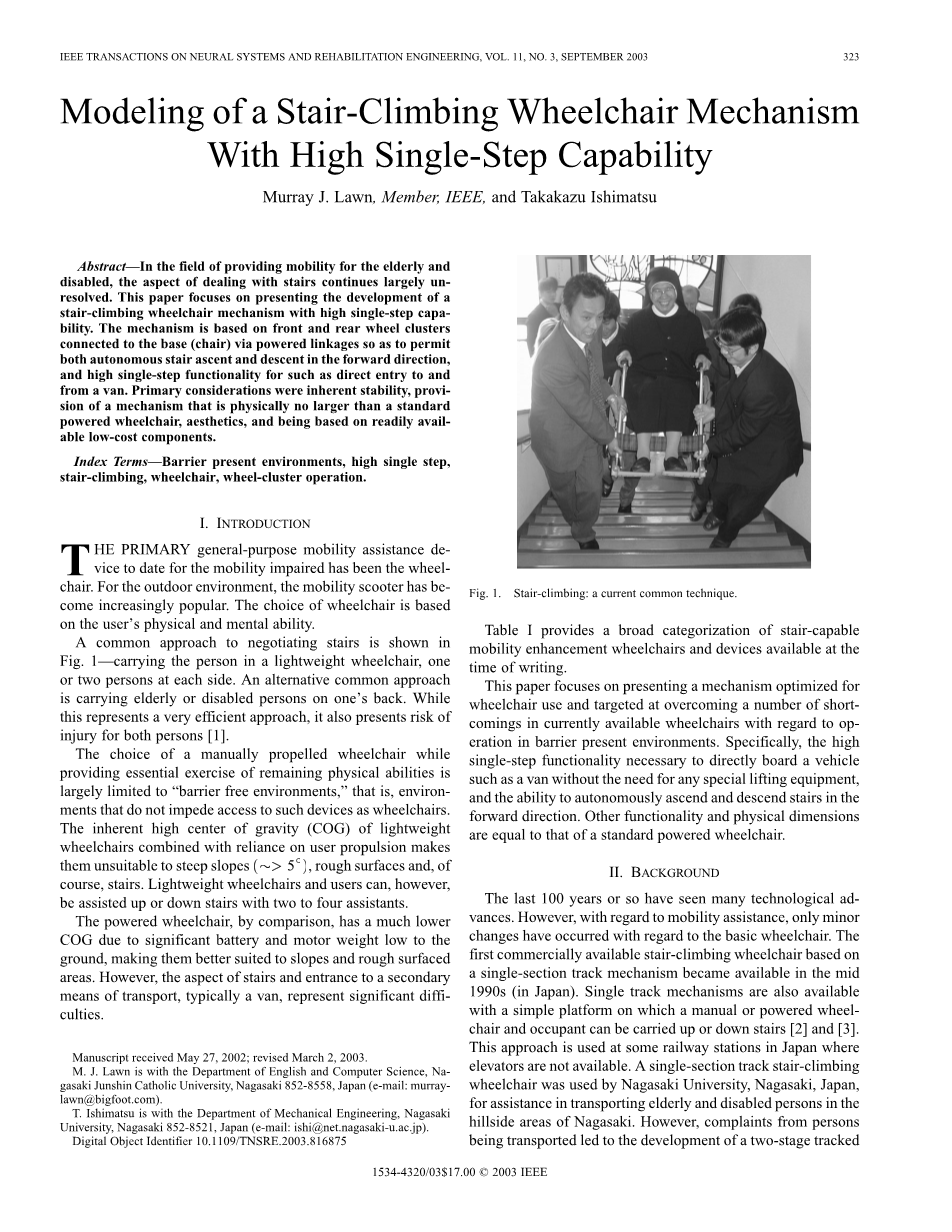
谈判楼梯的常用方法如图1所示 - 携带轻便轮椅的人,每侧一人或两人。另一种常见方法是在背后携带老年人或残疾人。虽然这是一种非常有效的方法,但它也会给双方带来伤害风险[1]。
选择手动推进轮椅同时提供剩余身体能力的基本锻炼主要限于“无障碍环境”,即不妨碍使用轮椅等设备的环境。轻型轮椅的固有高重心(COG)加上对用户推进的依赖使得它们不适合陡坡5,粗糙表面,当然还有楼梯。然而,轻型轮椅和用户可以在上下楼梯上辅助两到四个助手。
相比之下,动力轮椅的COG要低得多,因为电池和电机的重量很低,因此它们更适合斜坡和粗糙表面区域。然而,楼梯和进入二级运输工具(通常是货车)的方面代表了显着的困难。
Manuscript received May 27, 2002; revised March 2, 2003.
M. J. Lawn is with the Department of English and Computer Science, Na- gasaki Junshin Catholic University, Nagasaki 852-8558, Japan (e-mail: murray- lawn@bigfoot.com).
T. Ishimatsu is with the Department of Mechanical Engineering, Nagasaki University, Nagasaki 852-8521, Japan (e-mail: ishi@net.nagasaki-u.ac.jp).
Digital Object Identifier 10.1109/TNSRE.2003.816875
图1.楼梯爬升:目前常见的技术。
表I提供了在编写本报告时可用的具有阶梯性的移动性增强轮椅和装置的广泛分类。
本文的重点是介绍一种针对轮椅使用而优化的机制,旨在克服当前可用轮椅在障碍物存在环境中的操作方面的一些缺点。 具体地说,在不需要任何特殊提升设备的情况下直接登上诸如货车的车辆所需的高单步功能,以及在向前方向上自动上升和下降楼梯的能力。 其他功能和物理尺寸等于标准动力轮椅的尺寸。
- 背景
在过去100年左右的时间里,我们看到了许多技术进步。但是,在行动援助方面,基本轮椅只发生了微小的变化。第一款基于单节轨道机构的商用爬楼梯轮椅于20世纪90年代中期(日本)上市。单轨机构也可以通过一个简单的平台,手动或动力的轮椅和乘员可以在楼梯上下楼梯[2]和[3]。这种方法用于日本某些没有电梯的火车站。日本长崎长崎大学使用单节轨道爬楼轮椅,协助运送长崎山坡地区的老年人和残疾人。但是,来自运输人员的投诉导致了长崎大学与当地工业相结合的两阶段跟踪机制的发展[4],[5] [见图2(a)]。
履带式操作的优点是在大型凿成,不规则(随机),扭曲和非水平定向的楼梯上操作方面的简单控制和稳健性,通常在较旧的(历史性)山坡住宅区发现,例如长崎常见的楼梯和许多其他城市建在全世界的山区。然而,与跟踪操作相关的固有问题包括施加在正在协商的楼梯边缘的高压。
1534-4320/03$17.00 copy; 2003 IEEE
表I
可用于楼层的移动性辅助设备的大致分类
- (b)
图2.(a)长崎爬楼梯KSC-C-10。 (b)楼梯边缘Sunwa CDM-2的特写。
图2(b)显示了与楼梯边缘接触的履带式爬楼梯的特写。轨道上的旋钮和楼梯边缘之间的异步导致重量由单阶梯边缘产生,在所示的情况下,这计算为总静态重量约为160千克(轮椅加乘客-StairChair CDM-2) )在50毫米(轨道宽度)2(轨道数量)上停留5毫米(楼梯边缘接触深度),结果为32千克/厘米。根据操作员技能和由于楼梯边缘异步导致的旋钮滑动的随机性,动态考虑因素超过此值。因此,这种压力将履带式爬楼梯限制在具有坚固边缘的楼梯上。
表I中提供了广泛的楼梯移动辅助装置列表以及各自的优点和缺点的概述。升降椅[6]的例子是:平台升降机[7];单节履带式爬楼梯轮椅[8];双轨[9];轻型轮椅,带爬楼梯附件[10];动力单团爬楼梯[11];平衡型单簇爬楼梯[12];和动力双集群爬楼梯(铰接式前轮)[13]。虽然可以使用纯关节支腿,但实现平稳运行所需的控制复杂度非常高[14]。使用轮子形式的铰接轮的混合方法正逐渐成为谈判障碍物(例如楼梯)的常用方法 - 如表I中的最后四项所述。
最简单形式的车轮组适应最常见的运输方式 - “车轮” - 最常见的车轮障碍 - “楼梯”。如果使用单个车轮组,则任何形式的车轮都需要平衡机构。爬楼梯。在本文中,“单轮簇”是指两个相同轮簇的一般配置。在简单的单簇爬楼梯轮椅的情况下,平衡机构是人类助手。在具有COG修改(CM)的轮椅的情况下,操作者(用户)可以使用适当定位的扶手来为平衡机构提供引导信号。
为了不需要诸如扶手之类的辅助设备或特殊设备,该机构必须保持与楼梯的四个接触点并且以这样的方式配置以便始终提供可接受的稳定裕度。考虑到可接受的稳定裕度,三个接触点是可能的但很困难。为了实现这一点,需要一种在典型的楼梯上进行适应前后固有高度差的方法,以保持水平的椅子方向。参考表I,注意到两个缺点:1)没有轮椅机构迎合高台阶; 2)所有自行爬楼梯都反向爬楼梯。当需要使用二级运输模式时,通常会出现高台阶,这通常是面包车,在日本的情况下,传统日本家庭的第一步高度为30至60厘米。关于反向操作,在提供更简单和更合理的情况下,希望在行进方向上清楚地调节控制方式。
本文的其余部分概述了一种机制,旨在提供楼梯前进方向的自主操作,以及在单个高坡段的谈判中提供自主权,例如在需要进入货车时遇到的高坡段。
- 方法
- 设计目标
任何移动辅助设备的设计中心必须是安全的。因此,为了适应尽可能广泛的环境,一直保持与地面四个接触点的机制被认为是必不可少的[15]。
“易于操作”对于目标用户群(行动障碍者 - 残疾人或老年人)至关重要,并且在可接受性方面将是至关重要的。在这种情况下,无障碍区域的拟议操作与标准动力轮椅的操作相同,但是,在谈判诸如楼梯等障碍物时,需要一些低级别的辅助,例如,为用户提供诸如车辆下车,下车,楼梯协商,额外牵引或简单“站立”(与站立人员进行高架或眼睛接触)等选项。
最大化自治的一个方面是这种机制背后的主要动机,即最大限度地减少对外部援助或特殊设备的依赖。因此,始终在前进方向上的操作被认为是重要的。这个目标还没有完全实现,尽管可以在前进的方向上进行无辅助的楼梯上升和下降,但是只能在货车上下车。虽然可以在适当的传感器的帮助下自动操作,但显然必须目视检查计划的登陆区域。
下一个目标是一种不超过现有技术的物理尺寸的机制 - 在这种情况下,是动力轮椅。这在基本设计中实现,但在工作规模原型中略微超过宽度。这是由于使用了不适当规模的机械部件。
第三个目标是基于现成的相对低成本组件的设计。由于最近推出了低成本的轻型高功率直线执行器,因此实现了这一目标[16]。
最终目标理想是不超过现有技术的重量。实际上不能实现这一点,因为几乎任何功能的添加都会产生额外的重量,这在这些领域的早期工作中是肯定的。关注动力轮椅等重量的主要原因是在有楼梯或车辆障碍等障碍物时需要进行人员操作。
最大化操作的范围的方面是固有地与前面提到的车辆重量,和附加的动力功能(致动器)也增大了电源(电池)加载,进而降低操作的范围与标准动力轮椅,所有其它事情是平等的。
最后的考虑是美学,或更具体地说是公众接受。 除了最小化与当前(接受的)形式(在这种情况下是电动轮椅)的分歧之外,该方面不一定与任何逻辑相关联。 在无障碍操作方面,这在一定程度上实现。 然而,在楼梯谈判期间,机制确实在形式上发生了显着变化,并且可能被认为有点过于机器人。
(a)
图3.高台阶爬楼机构。 (a)无障碍模式。 (b)楼梯攀爬模式。
- 设计概要
高阶梯机构的侧视图如图3(a)所示,处于“无障碍模式”,即作为标准动力轮椅的操作,爬楼梯模式如图3所示(b)。 该机制的目标规范列于表II中。
- 建模过程
最初创建校准的二维(2-D)铰接纸模型并检查基本运动学。 然后对设计进行数值建模,以便计算诸如线性执行器输出要求。 建立了基于1-6.25标度的可控模型,以确认基本的机械可行性和一定程度的可控性。 比例模型使用4厘米充气轮胎和非常小的无线电控制(RC)伺服电机。 腿部设计基于[17]中最初提出的设计,增加了轮簇以满足精确平衡的需要。
二维数值模型和比例模型实现了以下八个基本操作阶段:
1)进入爬楼梯;
2)爬楼梯;
3)爬楼梯到降落;
4)进入楼梯下降;
5)下楼梯;
6)楼梯下降到降落;
7)登上车辆(高台阶);
8)从车辆下车(高台阶)。
表二
高阶梯爬坡机制目标规格
-
- (b)
图4.楼梯爬升操作。 (a)上升。 (b)下降。
- 楼梯攀爬作业
楼梯协商如图4所示,并通过以下步骤实现。
- 用户表示“阶梯谈判”。
- 椅子升高到足以允许前机械步进,步进和阶梯边缘传感器(见图5)。一个传感器系统用于检测一个步骤,表示需要爬楼梯,另一个用于检测已越过一个台阶的边缘,表示楼梯下降。
- 2)椅子继续以平整的方式上升,直到有足够的高度可以协调下一步上升或下降。
- 3)前组将以用户定义的速度向上或向下旋转,即在操纵杆上向前或向后旋转。
- 4)当轮簇返回水平位置时,轮簇旋转停止。
- 5)车辆再次以由操纵杆限定的速度向前移动,直到感测到另一个上升或下降。
- 6)步骤3)-6)重复直到后簇机构感测到一个步骤。
- 7)当后部机构感测到前后台阶之间的相对距离落在设定范围(主要基于高度差,即楼梯角度)之间的步骤时,前轮和后轮组同步爬升。
- 8)如果不是这样,前后集群将异步运行(一些俯仰运动),在这种情况下需要少量的腿部驱动来补偿异步前后单元向前运动的要求。
- 9)步骤3)-6)重复前后机构,直到达到楼梯的顶部或底部。
- 10)前机构检测不到台阶并保持水平方向。
- 11)后部机构继续操作到楼梯的顶部或底部。
- 12)椅子底座上的水平传感器为腿(关节机构)致动器提供必要的控制信号,以确保椅子角度始终保持恒定。
图5.建议的楼梯传感器放置。.
图6.直接面包车入口 - 后部集群登机操作。
1)在完成楼梯上升或下降后,后部集群也将保持水平方向。
2)然后可以选择返回无障碍模式,此时后轮组将变为垂直方向,前后腿单元完全缩回。
在爬楼梯和下降期间,前部集群在将底座(椅子)定义为楼梯高度/间隙方面充当主人。椅子水平自动保持在拱形。图4(a)示出了在爬楼梯操作期间的机构,而图4(b)示出了在同步前后集群操作的情况下的楼梯下降期间的机构。
- 高步操作
高步骤协商在图4和图5中示出。当需要使用某种形式的二次运输时,通常会遇到高台阶。这通常是面包车。
如下实现高单步协商。
1)用户表示高步。
2)在用户控制下将椅子升高到合适的高度。
3)然后将椅子移动到图3和4中所示的位置。 6(a)和6(b)。提出了一种合适的传感器来确认进入高台阶的距离(见图5)。
4)然后在顺时针旋转的同时折叠前机构,如图6(a)所示,在所示的路径中。前簇移动到图6(c)所示的位置。
5)确认进入高台阶的距离(见图5)。
图7.直接面包车入口 - 后部集群登机操作。
6)前轮组继续水平位置并降低到脚轮下方稍低的位置,从而获得主要重量以确保精确的前进运动。这主要是为了防止由于通常不是完美水平面的厢式甲板而可能发生的任何方向变化,或者考虑到非水平停放的车辆(在这些条件下自由转动的脚轮操作往往是错误的)。
7)然后,在用户控制下,椅子向前移动到一个位置,确保图7(a)所示的临时休息点足够在车辆内部。该静止点在图7
全文共13095字,剩余内容已隐藏,支付完成后下载完整资料

英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[293],资料为PDF文档或Word文档,PDF文档可免费转换为Word

