英语原文共 15 页,剩余内容已隐藏,支付完成后下载完整资料
并网与不间断电源功能相结合的混合再生电力系统的设计与实现
摘要
本文介绍了包括光伏(PV)和风力发电的混合再生电力系统,并将电网系统和不间断电源(UPS)的功能组合用于关键负载应用。所提出的系统采用六桥臂转换器拓扑结构,其具有用于整流器 - 逆变器的三个桥臂,用于电池充电/放电的一个桥臂以及用于PV模块和风力涡轮发电机的功率转换的两个桥臂。根据电网的状态,运行模式包括并网模式和UPS模式,提出一种功率平衡控制方案,该方案能够以最有效的方式降低电网功率并利用再生功率来满足电池三阶段充电的两个要求,并且不中断负载。此外,PV和风力可以优先使用,以提供适应当地情况的灵活性。设计并实现了单相1.2kW/110V系统,并通过一些实验结果验证了所提出的系统和控制方法的有效性。
1介绍
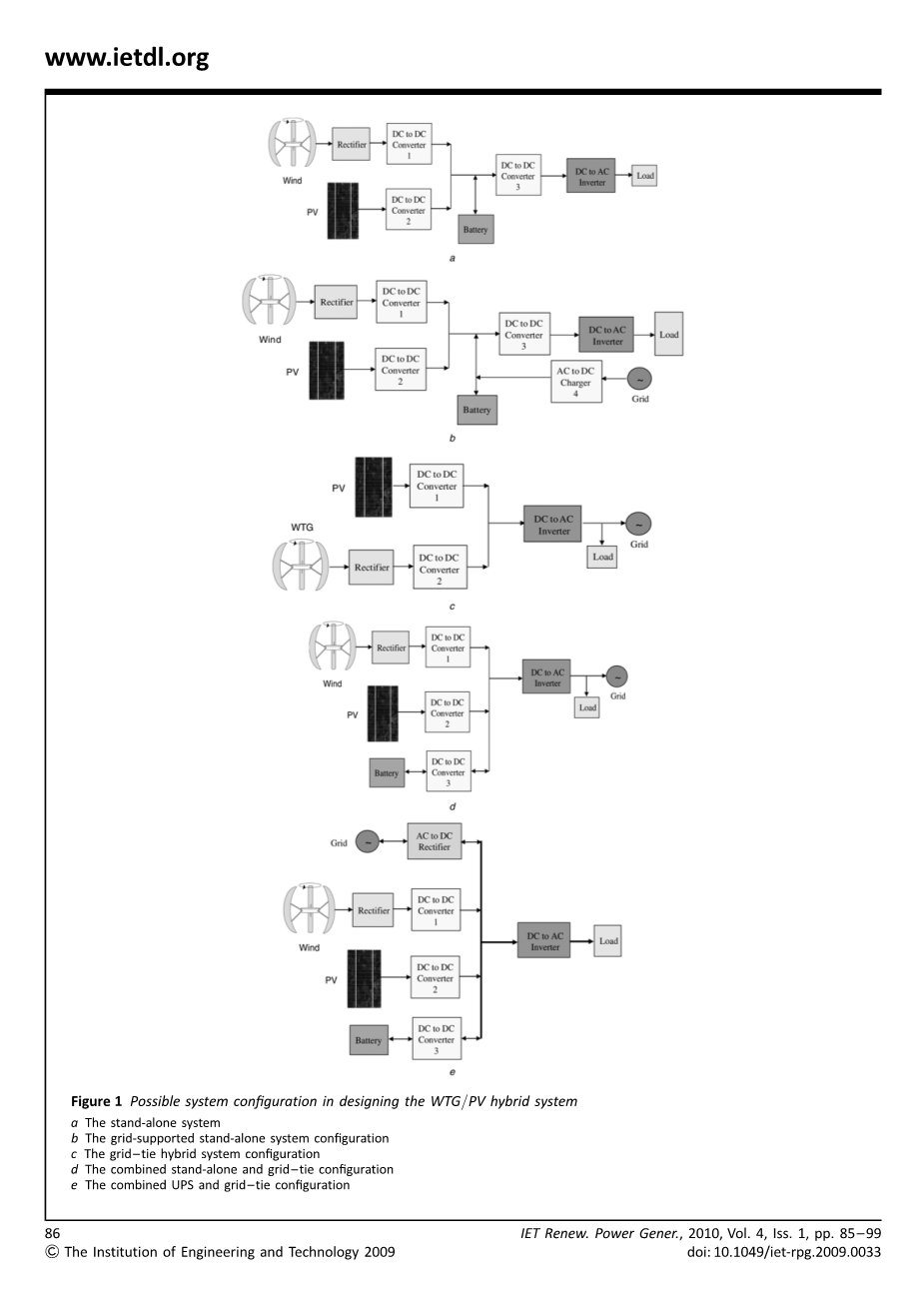
由于环境问题限制了发电用污染能源的使用,因此寻找可能的清洁和可再生能源替代品的需求正在全球范围内持续增长。越来越多的可再生能源和分布式发电机需要新的控制策略来运行和管理电力转换器,以保持可靠性并提高嵌入复杂能量转换单元的新电源系统的灵活性和质量。近年来,风力发电机(WTG)和光伏(PV)发电技术为利用风能和太阳能资源发电提供了机会。众所周知,可再生能源具有不可预知的随机行为;然而,其中的一些,如太阳能和风能,在很多方面都具有互补性。据报道,在弱电网中,风力发电机组/光伏混合系统比单个风力发电机组或光伏发电系统更好,因为它抑制了风力发电机组等单一输出功率的快速变化[1,2]。 另外,根据[3,4]报道的研究结果,配备电池存储单元的WTG / PV混合动力系统的电网接口可以极大地提高系统运行的可靠性和灵活性。基于操作功能,在设计如图1所示的风力发电机组/光伏混合动力系统时,有许多可能的系统配置。图1a所示的独立系统配置可以提供稳定的负载电压,但电源的可靠性不能得到充分的保证[5]。为了克服上述缺点,图1b显示了一个电网支持的独立的系统配置,具有良好的负载电压调节,并且有用于电池组的可靠充电源[6]。在低电池电压应用中,例如图1和2所示的应用。在图1a和1b中,DC-DC转换器3需要将电压升高到足以用于后级DC-AC逆变器的水平; 否则这个阶段可以省略。图1c [7]显示了一个并网混合系统,允许从WTG和PV向电网注入额外功率。在某些设计案例中,独立式和并网式配置如图1d所示,以实现更好的操作灵活性[8,9]。 应该注意的是,这两种配置中的负载电压不受调节,并且随着电网电压而浮动。 因此,对于关键负载应用,必须使用图1e [10]所示的组合在线不间断电源(UPS)的配置。 尽管Burgio等人 [10]显示了系统的操作和可靠性,详细的转换器电路,控制算法和系统的电源管理至今未见报道。在本文中,我们提出了一种用于UPS整流器逆变器的三桥六臂转换器拓扑结构,以及用于PV,WTG和电池的三桥臂,用于结合在线UPS和并网再生电力系统。 提出了一种新型的功率平衡控制方案。其设计目的是为了降低电网功率并以最有效的方式利用可再生能源,并且最重要的是满足电池三级充电的高充电状态和不中断的高负载可靠性。此外,可以优先对光伏和风力发电的利用进行设计。此功能对于适应天气变化和当地环境非常重要,可以提高系统的灵活性和性能。提供了转换器的详细建模和控制器设计。设计并实现了一个单相1.2 kW / 110 V系统,并通过一些实验结果验证了所提出的系统和控制方法的有效性。
图1设计WTG / PV混合动力系统时的系统配置
a独立系统
b电网支持的独立系统配置
c并网混合系统配置
d组合的独立和并网配置
e组合的UPS和并网配置
2混合发电系统的电路配置和运行模式
2.1系统描述和操作模式
根据电网的运行状态,系统可以分为并网模式和UPS模式。在实际运行中,根据光伏,风电,电池组和电网的各种情况,并网模式和UPS模式也可分别分为两种和三种运行模式。在并网模式下,PV和WTG在最大功率点(MPP)下运行。如图2a所示,如果PV和WTG的总输出功率高于电池组的负载需求和充电需求,额外的功率将被注入电网。这被称为电网馈电模式。相反,如果来自PV和WTG的总输出功率小于电池组的负载需求和充电需求,则从电网供应不足的功率,如图5所示。在图2b中,这被称为电网供电模式。在检测到电网运行状况异常时,启动UPS模式以避免负载断电。在这种情况下,如果PV和WTG的总功率小于负载需求,则电池组放电以补偿负载总功率需求的差距,如图2c所示; 这被称为放电模式。如果来自PV和WTG的总功率大于负载需求和来自电池的充电需求,则WTG具有保持在其MPP操作中的更高优先级,并且PV模块的MPPT控制功能如图 2d所示停止。这被称为部分MPPT模式,其目的是确保混合发电系统与负载之间的稳定的直流链路电压和平衡功率。同样出于功率平衡的原因,如果只是WTG的输出功率高于负载需求和充电需求,那么PV模块关闭,并且WTG的MPPT功能也应该立即停止,如图2e所示; 这被称为OFF MPPT模式。
在上述部分MPPT模式和OFF MPPT模式下,WTG电源的设计优先级高于PV电源。还可以有更高优先级的PV电力。最好的设计必须考虑许多因素,例如白天,夜间,季节,当地的气候条件,风况等等。其目标是在确保系统稳定性的前提下,以最有效的方式利用再生能源,从而尽可能地降低电网功率。例如,如果风况非常稳定,最好优先考虑,因为偏离PV的MPP更快更容易。相反,如果风力不一致,但光伏电力非常稳定,则优先选用PV。如果利用程序判断操作模式,就可以轻松切换优先级。在上述电网供电模式下,如果系统设计为在电网的峰值负载期间具有储能功能,则该操作也可以变为电网馈电模式。
2.2系统转换器的配置
为了实现并网和UPS功能并满足所提出的混合系统的所有可能的工作模式,本文采用了图3所示的六桥臂电源转换器拓扑结构。如图3所示,ABC臂组成一个共同的中性线单相整流器-逆变器[11],而DEF臂分别设计用于PV,WTG的功率转换和充电/放电操作电池组。在并网运行模式下,A臂用于调节直流母线电压,并通过控制电网电流来确保单位功率因数。由于检测到电网故障,A臂在UPS运行模式下不运行。C型臂专为逆变器运行而设计,并且始终受到控制,为负载提供低失真的正弦电压波。PV和WTG分别使用D臂和E臂将端子电压提升至直流链路的设计电压水平。F臂用于在并网运行模式下控制电池组的充电,并转向调节直流链路电压并允许在UPS工作模式下对电池组进行充电和放电,如图2C-E所示。
图2拟议系统的操作模式
a电网馈电模式
b电网供电模式
c放电模式
图2 继续
d部分MPPT模式
e OFF MPPT模式
3控制器的系统建模和设计
3.1对三臂整流器 - 逆变器的建模
如前所述,图4所示的控制结构用于所提出的三桥臂整流器-逆变器。双回路控制策略在设计用于整流器和逆变器操作的控制器中实现。内部环路设计用于电感电流控制,而外部环路分别用于直流链路电压调节和交流电压控制器。为了设计相关的控制器,必须首先推导出三臂整流器/逆变器的数学模型。根据图4,描述整流器和逆变器两侧的电感电流的等式可以用如下Kirhoff电压定律(KVL)表示:
(1)
(2)
如果对三个臂中的每个臂采用正弦脉宽调制(PWM)并且忽略高阶开关项,则可以导出以下输出电压方程:
, (3)
其中是i臂()的控制电压,是PWM的三角波振幅。 通过将(3)代入(1)和(2),可以获得以下电压等式:
(4)
(5)
公式(4)和(5)表明整流器和逆变器的输出电流都受B臂控制电压(vconB)的影响。 为了实现对整流器和逆变器电流的解耦控制,可以按如下方式分配B臂控制电压:
(6)
使用(6),(4)和(5)可以重写如下:
(7)
(8)(6)和(7)中的kpwm可以看作是转换器的电压增益,具有以下形式:
(9)
逆变器侧电容器的输出电流方程由下式给出:
(10)
基于上面导出的等式,可以设计相关的电流和电压控制器。
图3建议的六桥臂转换器拓扑结构
图4 ABC臂的控制结构
3.2三桥臂整流-逆变器控制器的设计
根据式(7),电源电路和相关控制框图如图5所示。ks和kv分别是电流和电压信号的传感因子。 在图5中,电流控制器利用反馈和前馈控制器。 控制信号-可以用来消除由和/2引起的对电流回路的干扰。是逆变器电压命令,是输入电压的标称电压。 电流反馈环路中的参数关系可以通过数学方法获得并表达如下。电流反馈环路中的参数关系可以通过数学方法获得并表达如下:
(11)
在(11)中,是输入电流环路的带宽,可以由来设置。 在正常的设计标准中,带宽被设计为开关频率的1/10-1/5。 通过将同步正弦信号(sin vt)与电压调节回路的控制误差相乘,由直流电压控制器产生整流器的电流命令()。 的设计可以通过使用单位功率因数等效电路的图6a导出直流电压回路的小信号模型来实现。由于直流母线与其他变流器和电网相连,直流接口可以简单地用直流电容器建模[12]。交流侧的输入功率由下式给出:
(12)
如(12)所示,交流电源包括一个一次项和一个二次谐波,该二次次谐波在交流电压中产生二阶纹波。直流侧的平均功率等于交流侧输入功率的直流项
(13)
通过将交流电流源折算到直流侧,可以获得等效电路,如图6b所示。 使用(13),可以导出以下关系:
(14)
(15)
电压回路的数学模型可以通过使用直流电流源Id表示Cd的充电作用来绘制
(16)
使用图7a,可以设计电压控制器。由于在这种设计情况下,电流回路的带宽比电压回路的带宽宽得多,所以(11)的电流回路响应可以简化为理想状态(= 1 )并且的增益是电流感测因子ks的倒数。图7b给出了电压环的波特图。如前所述,直流电压包含二阶谐波。因此有必要设计电压回路的带宽远低于120 Hz,以降低二阶电压纹波。在本文中,II型补偿器(PI Low-Pass)用于设计。为了比较的目的,使用PI控制的闭环响应也在图7b中示出。
图5相关控制框图
图6直流母线电压控制链路的建模
a整流器侧的功率流
b直流母线电容器侧的等效电路
图7直流母线电压控制器设计
a电压控制回路
b电压的波特图
(17)
在(17)中,是电流回路的带宽,可以用与相同的标准设计,并直接由设置。 由于前面提到的同样的原因,(17)的响应可以假设为1,并且电压回路的控制框图可以简化并在图8b中示出。基于同样的方法,反馈和前馈技术被用于设计电压控制器,其中由负载电流的反馈信号消除了由负载电流引起的对电压回路的干扰。电压控制回路的响应可以从图8b得出如下:
(18)
在式(18)中,是电压环的带宽,可以直接计算为并由设置。
3.3 DEF臂的建模和控制器设计
基于平衡功率流和执行图2所示所有工作模式下开发的能量管理功能的需求,图9a给出了为DEF臂设计的所需控制器。对于PV模块和WTG,都可以应用相同的控制结构; 也就是说,外部回路设计用于执行MPPT功能并提供电压指令,而内部回路则专用于所需的电压控制器以跟踪电压指令。转换器的占空比参数可由调节后的电压决定 由于F-arm设计用于对电池组进行充电和放电,实时调节直流母线电压和平衡功率,因此需要设计相关的控制器。
在图9a中,MS1-MS3分别是用于PV,WTG和电池充电器的模式选择开关。 在并网运行模式中,如图1和2所示。在图2a和2b中,直流母线电压由三臂整流器-逆变器的整流器(A臂)调节。MS1和MS2都设置为0,许PV和WTG通过设计的MPPT控制器在其MPP上运行,并且电池臂(F臂)的MS3切换为接收来自电池充电器的控制信号。充电命令从充电控制器的电压调节器获得,并具有用于设置恒定充电电流水平的限制器。充电控制器的内部控制回路是电流调节器,其被设计为通过PWM控制信号来跟踪充电电流命令。
当发生电网中断时,系统切换到UPS模式,并且三臂整流器 - 逆变器的整流器臂(A臂)停止。在这种
全文共11521字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11836],资料为PDF文档或Word文档,PDF文档可免费转换为Word

