英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
基于多传感器的智能建筑安保机器人[1]
Ren C. Luo、Tung Y. Lin、Kuo L. Su
摘要
智能建筑可以为21世纪的生活提供安全,便利,高效和娱乐性。智能建筑的最重要角色是安保系统。我们开发了一种基于多传感器的智能安保机器人(ISR),该机器人已广泛应用于智能建筑中。智能安保机器人可以检测异常和危险情况并通知用户。该机器人具有圆柱外状,其直径,高度和重量分别为50cm,130cm和100kg。智能安保机器人的功能包含六个部分。有软件开发系统;避障和运动规划系统,图像系统,传感器系统,远程监控系统等系统。我们在智能安保机器人中开发了基于多传感器的传感器系统。我们使用多种多传感器融合算法在传感器系统的检测子系统中获得准确的决策。存在自适应融合方法,基于规则的方法和统计信号方法。我们演示了使用直接控制模式和行为控制模式控制智能安保机器人的远程监控系统。我们认为安保机器人系统中的人机界面必须具有移动性和便利性。因此,我们使用触摸屏来显示系统状态,并设计一个通用的用户界面(GUI)为用户和访客提供服务。用户也可以通过GSM调制解调器使用手机远程控制设备。设备模块可以通过手机将反应结果反馈给用户。最后,我们在智能安保机器人(Chung-Cheng-I)中实现了火灾探测系统。如果发生火灾,智能安保机器人可以使用火灾探测系统找出火源。在入侵者检测中,我们使用智能安保机器人对相同的场景进行编程以检测入侵者。智能安保机器人使用GSM调制解调器将火灾事件或入侵者的检测结果消息发送给用户,并通过互联网将检测结果发送给客户端计算机。
关键词
智能建筑;智能安保机器人(ISR);多传感器融合算法;自适应融合方法;通用用户界面(GUI);GSM调制解调器
1.引言
随着机器人技术日新月异的发展,机器人系统已被广泛应用于许多应用中。如今,机器人系统已应用于工厂自动化,危险环境,医院,手术,娱乐,太空探索,农田,军事,安全系统等领域。近年来,越来越多的研究对可帮助我们日常生活中的人们的机器人进行了研究,例如服务机器人,办公机器人,安保机器人等。我们相信,机器人将在未来的日常生活中发挥重要作用,尤其是安保机器人。
房屋,建筑物,实验室及工厂的安全至关重要。该安保系统可以识别危险并发出警报来保护人类,还可以检测到入侵者,火灾,气体和环境状况。同时,可以安装更多种类的设备,例如服务机器人。通常,安保设备是相对固定和被动的。安保机器人是一个活动系统。安保机器人比安保设备更灵活。从根本上说,开发的安保机器人具有执行此类安保服务的以下功能:自主导航,主从操作系统,通过网络进行的监视,远程操作的摄像头视觉系统以及危险监测与诊断系统[1-6]。近年来,无线互联网技术变得越来越重要。
在过去的文献中,许多专家已经对安保机器人进行了研究。有些文献介绍了安保机器人目标跟踪系统的研究现状[7,8],例如Hisato Kobayashi等人提出了一种通过自动移动警卫机器人检测人类的方法[9]。Shiomoasa等人开发了自主警卫机器人[10],它将安保和服务系统集成到自主警卫机器人中;该机器人可以在白天引导游客,并在夜间巡逻。DA Ciccimaro开发了一种自动安保机器人“ROBART III”,该机器人配备了非致命响应武器[11,12]。此外,一些研究提出具有灭火的能力机器人[13]。一些安全机器人产品已经发布。例如日本的SECON和SOC,以及美国的国际机器人。
本文的其余部分安排如下:第2节描述了智能建筑和智能安保机器人的系统架构。第3节阐明了智能安保机器人的系统功能。第4节介绍了智能安保机器人的火灾检测、入侵者监测以及环境检测的检测方法。在第5节中实现了使用智能安保机器人进行火灾探测和入侵者探测的实验结果。第6节提出了简短的结论性意见。
2.系统架构
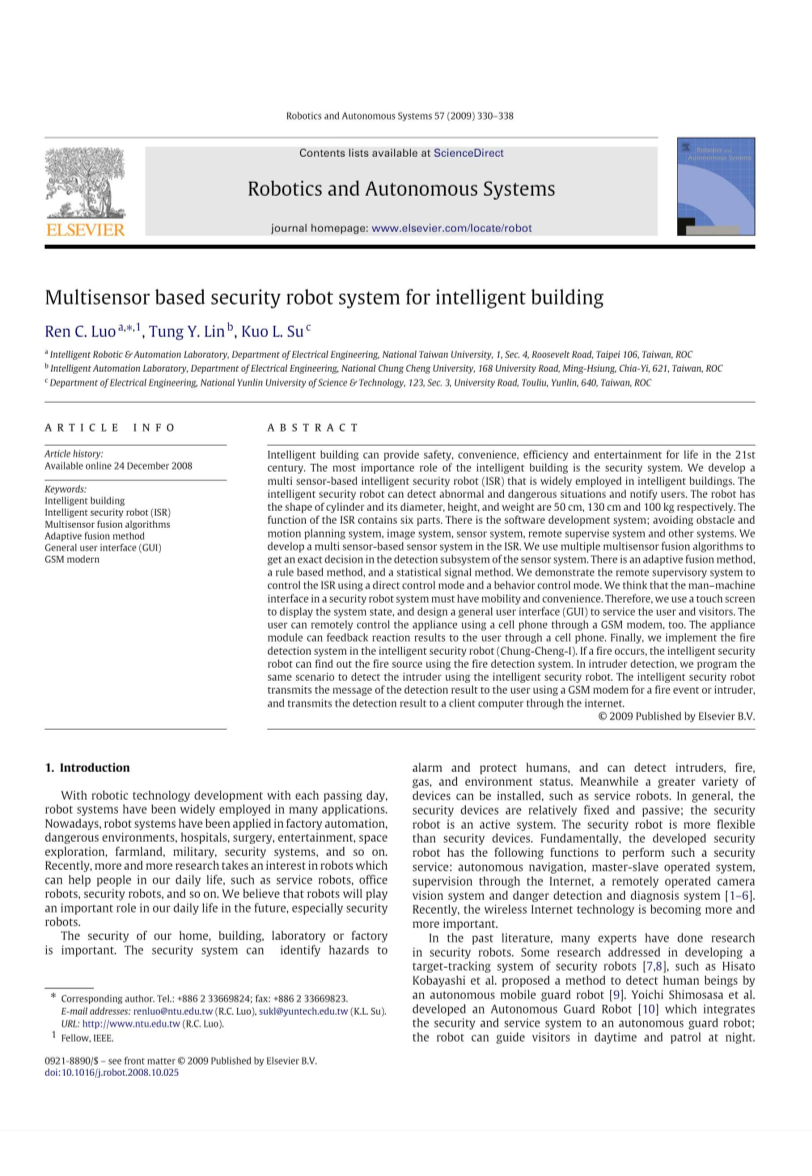
智能安保系统的系统架构如图1所示。该系统包含智能安保机器人(ISR),远程监控计算机,安全模块和设备控制模块。智能安保机器人包含主控制器(IPC),安全检测,RF接口和GSM调制解调器。智能安保机器人可以使用无线RF接口接收安保模块和设备控制模块的状态。在安保模块中,它与安全机器人和蜂窝电话使用单向通信。但是设备控制模块使用与智能安保机器人和蜂窝电话的双向通信。智能安保机器人可以使用RS232接口与GSM调制解调器通信。GSM模块(WMOD2)由Wavecom制造。该模块是自包含的E-GSM900/GSM1800(或E-GSM900/GSM1900)双频段模块。
图1 智能建筑安保系统框架
智能安保机器人的RF接口可以从安保模块获取信息。远程管理计算机可以通过互联网与智能安保机器人进行交互。Web服务器通常在本地站点中设置,以减少互联网时间延迟。因此,监控计算机和远程监视计算机在同一局域网中进行通信。用户可以连接到监控计算机以获取房屋或建筑物的安全信息,并控制移动机器人在房屋或建筑物中的任何地方巡逻,并通过互联网监视设备控制模块。用户可以通过GSM使用蜂窝电话获取安全信息并管理设备控制模块。
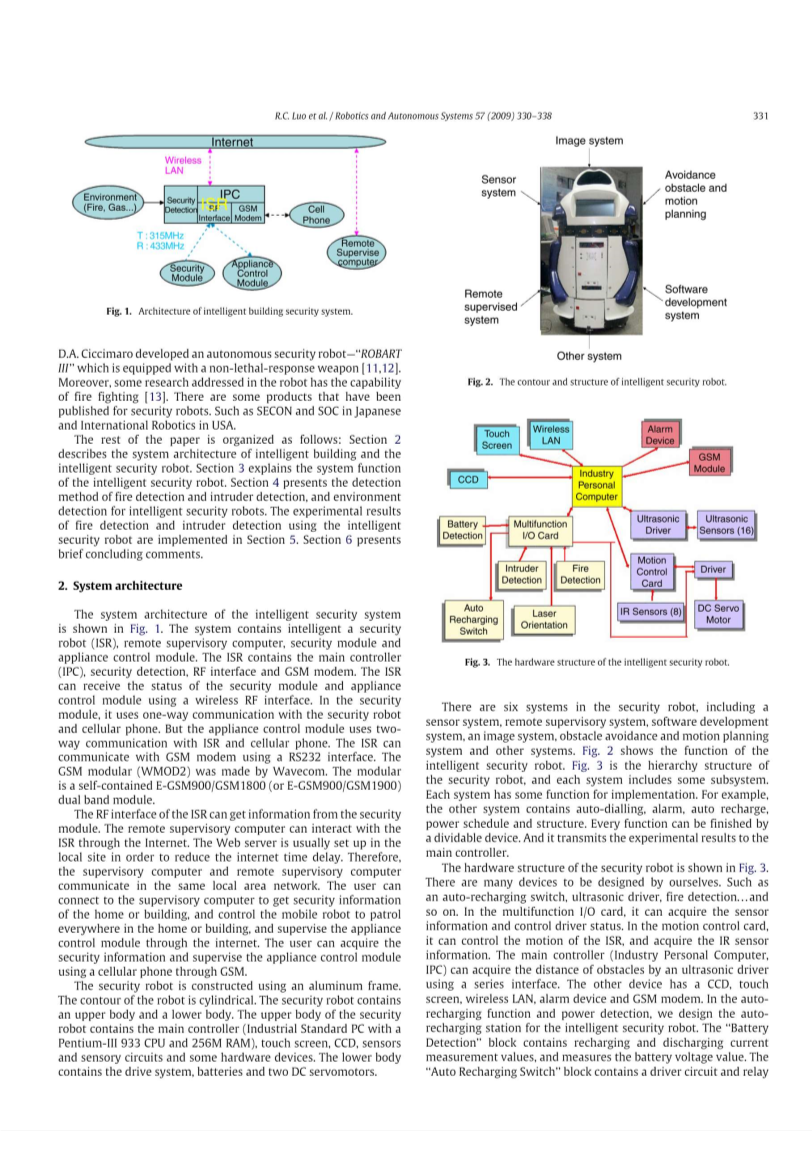
图3 智能安保机器人的硬件架构
图2 智能安保机器人的轮廓与架构
安全机器人使用铝制框架构造,它的轮廓是圆柱形的。安保机器人包含上部和下部。安保机器人的上半部包含主控制器(带有奔腾III 933 CPU和256M RAM的工业标准PC),触摸屏,CCD,传感器和传感电路以及一些硬件设备。下半部包含驱动系统,电池和两个直流伺服电机。
安全机器人中共有六个系统,包括传感器系统,远程监控系统,软件开发系统,图像系统,避障和运动规划系统以及其他系统。图2显示了智能安全机器人的功能。图3是安保机器人的层次结构,每个系统都包含一些子系统。每个系统都有一些实现功能。例如,另一个系统包含自动拨号,警报,自动充电,电源计划和结构。每个功能都可以由可拆分的设备完成。并将实验结果传输到主控制器。
安全机器人的硬件架构如图3所示。有很多设备需要我们自己设计。例如自动充电开关,超声波驱动器,火灾探测等。在多功能I/O卡中,它可以获取传感器信息并控制驱动程序的状态。在运动控制卡中,它可以控制智能安保机器人的运动,并获取IR(红外辐射)传感器信息。主控制器(工业个人计算机,IPC)可以通过超声波驱动器使用串行接口获取障碍物的距离。另一个设备具有CCD,触摸屏,无线局域网,警报设备和GSM调制解调器。在自动充电功能和电量检测方面,我们为智能安保机器人设计了自动充电站。“电池检测”块包含充电和放电电流测量值,并测量电池电压值。“自动充电开关”块包含驱动器电路和继电器元件,并控制充电电流以防止过载。它可以打开和切断充电电流。
3.系统功能
智能安保机器人的感官系统的层次结构如图4所示。感官系统具有六个变体子系统。它们是:火灾探测子系统,入侵者探测子系统,功率探测子系统,环境探测子系统,电机控制子系统和障碍物探测子系统。
图4 智能安保机器人的硬件架构
这些子系统可以获取传感信号并使用放大器和校准电路处理这些信号,并使用接口设备将传感数据传输到IPC。在火灾探测子系统,入侵者探测子系统和电机控制子系统中,我们使用数字输入/输出接口卡来传输感官数据。在电源检测子系统和环境子系统中,我们使用模拟输入接口卡来获取测量值。我们使用16个超声波传感器和8个IR传感器在障碍物检测子系统中检测障碍物。然后,我们使用微处理器(MCS-5A系列)来驱动超声传感器,并从障碍物获取距离值,然后使用串行接口(RS232)将距离值传输到IPC。这些传感器在表1中列出。
图1 安保机器人中的传感器
|
子系统 |
感测器 |
例子 |
|---|---|---|
|
火灾探测子系统 |
温度感应器 |
AD590 |
|
烟雾感应器 |
TG135 |
|
|
火焰感应器 |
R2686 |
|
|
入侵者检测子系统 |
人体感应器 |
Body |
|
超声波传感器 |
宝丽来6500 |
|
|
红外传感器 |
SMC-10R |
|
|
障碍物检测子系统 |
光操作接近传感器 |
CDD-40N |
|
超声波传感器 |
宝丽来6500 |
|
|
环境检测子系统 |
气体传感器 |
TGS 822 |
|
湿度传感器 |
C2–M3 |
|
|
照度计传感器 |
S1133 |
|
|
语音感应器 |
麦克风 |
|
|
功率检测子系统 |
电流传感器 |
MEL-55P |
入侵检测传感器和其他硬件的布置如图5所示。在火灾探测传感器中,我们将烟雾传感器,火焰传感器和温度传感器组合在一个模块中。该模块固定在智能安保机器人的正面。在入侵传感器中,我们使用了三个人体传感器,十六个超声波传感器和八个红外传感器,它们布置在智能安全机器人的外部。智能安全机器人可以使用GSM调制解调器将消息发送给用户。GSM调制解调器与智能安全机器人的关系如图6所示。智能安全机器人使用GSM(全球移动系统)模块与手机进行通信。
远程控制和监视界面如图7所示;该界面包括四个子窗口:顶部窗口用于环境检测。左上方的窗口显示机器人的视觉系统;左下方的窗口显示远程环境的全局地图以及推测航行法测量中移动机器人的轨迹;右下角的窗口显示机器人运动系统的几种控制模式;顶部窗口显示移动机器人的环境检测状态。环境传感器包括火焰传感器,烟雾传感器,温度传感器,人体传感器,湿度传感器,气体传感器,噪声传感器和亮度传感器。发生危险情况时,安保机器人服务器会发出警报并通过互联网通知远程站点。
图8 三合一火灾探测传感器
图7 远程控制和监视界面
图5 传感器布置
图6安保机器人GSM模块和主控制器的关系
我们设计完成的三合一火灾探测传感器如图8所示。左图显示原始硬件,右图显示我们用外壳封装传感器以匹配智能安保机器人的外部。它与火焰传感器,温度传感器和烟雾传感器集成在一起,以检测火焰温度和烟雾信息。发生火灾时,最异常的环境变化是火焰,温度升高和空气中冒烟。因此,我们采用火焰传感器,温度传感器和烟雾传感器来检测这三种情况是否正在发生。在收集火灾探测模块的信息时,我们使用自适应多传感器融合算法来判断是否发生火灾。
在远程监控系统的层次结构中,它包含通信协议,数据库,互联网,用户界面和触摸屏。远程监控系统的硬件配置包括要嵌入到智能安全机器人中的机器人服务器(安全机器人的主控制器,即IPC),Web服务器工作站,客户端计算机(PC或PDA)和传感器,如图9所示。
智能安保机器人的主控制器可以获取感官数据以检测火灾,入侵者,气体等。它还可以控制彩色CCD,电机等。智能安保机器人的主控制器可以与Web服务器进行交互。为了减少互联网时间延迟,通常在本地站点上设置Web服务器。因此,智能安保机器人的主控制器和Web服务器在同一局域网中进行通信。Web服务器可以通过互联网从机器人服务器获取感官数据(传感器状态,命令,机器人状态,环境条件等)。Web服务器还可以通过互联网接收客户端的命令,然后将其传输到机器人服务器。远程用户可以连接到Web服务器或机器人服务器,以通过互联网通过计算机或PDA获取所有信息。
用Visual C 实现的GUI中有三种控制模式:直接控制模式,监督控制模式和作业调度模式。在直接控制模式下,对话框包含控制按钮,例如前进,后退,左转,右转和停止。与控制相机有关的控制按钮包括上,下,左,右,放大和缩小。用户不仅可以使用鼠标单击按钮,还可以在键盘上将按钮向上箭头,向左箭头,向右箭头和向下箭头按下。此外,用户可以按工具栏中的按钮选择机器人运动的当前速度(图10)。
图10用户可
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238037],资料为PDF文档或Word文档,PDF文档可免费转换为Word

