
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
汽车造型设计空间草图系统
Shunsuke YOSHIDA*, Shinya MIYAZAKI**, Toshihito HOSHINO***, Toru OZEKI***, Junichi HASEGAWA**, Takami YASUDA*, Shigeki YOKOI*
*人力情报学研究生院, 名古屋大学, 日本
{shun, yasuda, yokoi}@info.human.nagoya-u.ac.jp *
*计算机与认知科学学院,中京大学,日本
{miyazaki, hasegawa}@sccs.chukyo-u.ac.jp
***n丰田汽车公司, 日本
{hoshino, ozeki}@ design.en.toyota.co.jp
摘要: 对于汽车设计师来说,为了获得对一个设计想法的实体感受,花费很长的时间去等待一个物理样机制成或者去学习困难的CAD都是不可取的。本文提出了一种空间草图系统,该系统提供了一个类似手绘的建模界面,实现了人性化的工业设计3D绘图,如汽车造型。设计师可以通过操作形似笔的输入设备在三维空间的画布上相对自由地画出精确的曲线和曲面,以直接观察该物品的3D展示。建模过程由两部分组成:草图和细化。在草图这一阶段,用户通过自由地绘制曲线和曲面迅速地产生方案。这是在3D数字工具中普通的二维草图的描述,并且对汽车造型设计的第一步——概念设计有很大的用处。它提供了多层次的画布和可在三维浮动菜单中选择的彩色铅笔。而擦除命令的执行就好像是使用一个真正的橡皮擦擦掉对象一样。然后,在细化的过程中,对草图表面的精确跟踪可以完成精确的NURBS模型。那些用以协助用户的功能也得到了实现。例如,经常使用的命令是由简单的手势选择,当设计师快速摇动输入设备时这条曲线会自己消失,这实现了比基于传统菜单上的更快地指令选择。在该系统中,所有的命令都会保存,这样设计师可以在创作过程中随时撤消和重做以快速比较各个方案的可取性。
关键词: 3D 建模, 手绘, 汽车, 工业设计, 电脑图像, 虚拟现实.
1 简介
因为物理样机的建造既浪费时间又花费金钱,计算机在现代工业产品的设计中被越来越多的使用。目前,计算机辅助设计(CAD)系统被用作标准的数字工具来构建三维模型。该系统的优点是可以建成一个具有严密的数学逻辑的模型,但是其中三个正交视图并不直观而且操作复杂,这非常不利于概念设计——处于设计早期且对设计师灵感需求非常高一个阶段。同时,在一个非立体CRT显示器上也很难进行一个立体的展示。作为妥协,传统的纸质草图用于设计的最初想象;然后CAD和粘土或木材实体模型就被用于检测草图和成品的一致性以及产品质量的最终评价。但设计师却一直在向往着所有的设计过程都可以使用计算机来完成。
因此本文提出了空间素描系统,实现了这样的环境。该系统的画布是三维空间:设计人员可以直接使用指示控制设备在空间中画出曲线和曲面,就像使用铅笔一样。因为直观的界面是模仿素描纸而设计的,所以设计创造的过程不会被干扰。而且因为有了数字数据,设计师可以很简单的通过多次的尝试来完善自己的方案。另外,通过立体显示,汽车内饰设计也可以转变为可视化的,与此同时,还能够去评价座舱的操作舒适性。
构建这样一个集成环境,提供一个直观而简单的操作界面以及真实空间里与虚拟空间中坐标的差异校正都是很重要的。输入设备坐标和立体坐标之间的失配会使想象中的设计不可能出现在设计师的眼前,因为在尚未取得统一的坐标下获得的虚拟产品的印象会与生产的实际产品不同。这也就意味着在设计过程最后阶段的检查和评价也不能正确地进行的。
所以,在本文中,我们分两个主题来阐述开发这个系统的方式:一是如何利用空间系统素描,另一个是向用户显示正确的立体视觉的技术。
2 概念设计工具
让我们来想想传统的设计过程。在第一步中,设计师勾勒出他/她的想法在纸上用铅笔或揉捏粘土创建一个新的设计。草图能够迅速代表的想法。因此,可以迅速地创造了许多设计。粘土造型并不像素描那样迅速,但它可以确认三维模型是否适宜。在下一阶段,这些设计会由扫描仪或数字化仪输入计算机,然后用CAD系统提炼它。在生产过程中效率的提高越来越受到重视,所以需要数字数据协助。一旦它被数字化后,它就可以被重复使用。
有一些研究直接数字化概念设计。例如,SKETCH (Zeleznik, 1996c) and Teddy (Igarashi等人, 1999b)是数字工具,它可以从一开始就在电脑绘制草图。他们使用鼠标或触控笔作为输入设备,而不是铅笔和纸。因此,素描便可数字化。然后,三维模型会自动从二维草图构造。这些研究的目的与从我们的目标稍微有一点点不同。
3-Draw (Sachs等人, 1991c) 通过使用虚拟现实技术来改善了CAD系统的交互界面。这个系统可以使用三维指点设备来输入一条三维的曲线,而非通过鼠标。VLEGO (Kiyokawa等人, 1996a) 提出了适合初学者一个简单的建模环境。它利用头盔显示器和数据手套等作为接口的一端,因为它模仿了乐高玩具块,所以操作很容易理解。它的主要目的是提出一个直观易用的界面,并以初学者为基本对象来发展建模工具。(Butterworth等人, 1992; Hashimoto等人, 1999a).除了这些项目,我们的系统的优点是提供了一个不会打断工作灵感的用户界面,以及对产品设计审查很有必要的立体显示精度也得到了我们的认真对待。
3 草图空间系统
3.1概述
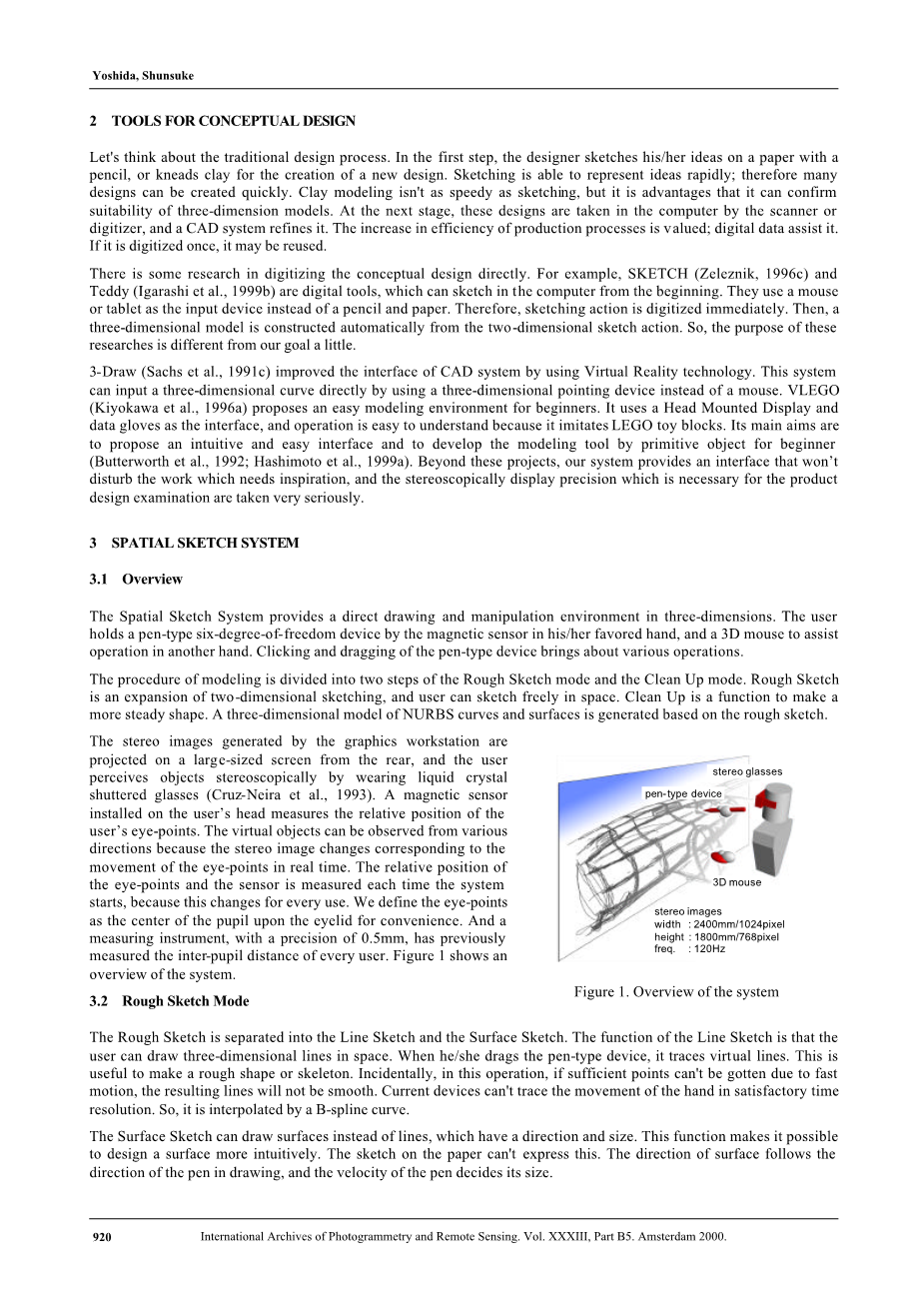
空间草图系统提供了在三维空间直接绘图和操作的环境。用户使用他/她偏爱的手持有和笔形状相似并且拥有六个自由度的磁传感器设备,另一只手持有三维鼠标作为协助。点击和拖动笔型装置会引发多种操作方式。
建模的过程分为草图模式和清理模式的两个步骤。草图模式是二维草图绘制的一个扩展,用户可以在空间中自由绘制草图。而清理模式可以提炼一些更加稳定的形面。基于画稿,NURBS曲线和曲面的三维模型便可生成。
由图形工作站产生的立体图像被投影在后部的大尺寸屏幕上,然后用户通过佩戴液晶快门眼镜便可以立体地感知对象(Cruz-Neira等人, 1993)。安装在用户头部的磁传感器用于测量用户的眼睛聚焦点的相对位置。因为图像会对应于眼点的实时运动而做出移动,所以虚拟对象可以从各个方向映入眼帘。眼点的相对位置和传感器在系统每次启动时都会重新校正,因为每次使用它都会有一定的改变。为了简化,我们定义眼点为在眼睑中心的瞳孔。与此同时,我们也使用了精度为0.5mm的测量仪器早先对每个用户的瞳孔间距做出了测量。
3.2草图模式
草图分为线条草图和曲面草图。线条草图的功能是,用户可以绘制在空间三维线条。当他/她拖动笔型设备,它会跟踪移动轨迹出现一条虚拟的线条。这对于做一个大概的形状或骨骼是很有用的。顺便说一下,在此操作中,如果由快速运动不可以得到足够的点,所得线将不平滑。目前的装置不能在满意的时间下以满意的精度跟踪手的运动。因此,它是由一个B样条曲线以内插值替换。
表面素描可以画有一个方向和大小曲面而非线条。这个功能使得用户可以更直观地设计表面。而纸上的草图则不能表达这一点。面的方向上遵循绘图笔的方向,笔的速度决定其大小。
画稿还具有其它功能。它可以改变颜色和线宽,并且它可以在不同的图层素描。单击漂浮在空间中的3D图标就可以设置这些了。而且也可以使用橡皮擦擦除线条草图或曲面草图。线条草图和曲面草图绘制的一个例子如图2所示。
3.3清理模式
在你将最初的想法在草图模式中表达出来之后,成品模型将在清理模式产生,就像一个CAD系统一样,这个系统是基于表面建模的。因此,NURBS曲线和曲面是该虚拟模型的基础。为产生一条曲线,用户需要参考草图点击鼠标以设置特征点,并且在最后一个点的位置双击,这样这些点就可以生成一条平贯穿这些点的曲线。
表面则是通过结合曲线生成的。在你选择浮动菜单中的曲面工具之后,点击用于生成曲面的曲线,曲线和曲线的数量会对分别决定所生成曲面。譬如T型曲面的生成。生成扫描曲面,需从菜单中选择相应功能,并拖动基础曲线,然后就会生成一个由基础曲线和路径构成的曲面。
即使在清理模式也可以改变诸如颜色或宽度等对象属性,就如同在草图模式。并且也能自由地编辑的对象。例如,点击一个曲线或曲面会出现一个虚拟把手,拖动它能够调整对象大小和旋转。此外,拖动通道点和控制点也可实时编辑对象。另外,对象是通过直接拖拽移动,通过手势被复制和删除。
3.4指令切换
手势(非3D菜单)选择模式(草图模式,清理模式)和工具(草图和橡皮擦)。手势操作可以比菜单更迅速。因为当你使用一个菜单,你需要将笔移动到菜单,然后查找你想要的命令,完成这些麻烦的步骤后再重新开始你的工作。但是,一个手势可以做到这一切的。并且,生成曲线和选择对象在清理模式这两个命令经常会因为同样的原因被用户的手势切换。模式切换的流程如图3所示。
考虑到命令的使用频率,频繁调用的命令是由手势或适合于快速切换的动作完成,而其中有很多变化的命令,会使用菜单。各项实施方式将会在下面说明。
画稿模式和清理模式之间切换
使用你的惯用手点击在你眼前最多10厘米且靠近你肩膀的地方
草图工具和橡皮擦之间切换
使用你的非惯用手点击靠近你肩膀的地方
清理模式下的操作
在该模式下,调用的命令取决于你在哪里点击。当您单击没有对象的地方,生成曲线命令启动。点击传球点后,在最后一点上双击。当您单击对象,该命令是选择对象。你可以通过连续拖动对象来移动或复制所选对象。在此模式下,虚拟手柄控制对象的旋转,大小和形状。当你拖动它,物体旋转,调整大小和重塑。使用非惯用手点击靠近你的肩膀可退出此模式。
移动的判断,拷贝和删除对象
要将这些命令区分,系统会在用户拖动对象时分析对象的行程。当简单拖动时,物体只会移动。当用户在拖动开始时画了一个环,对象会被复制到按钮被释放的地方。此外,当对象被拖动时有一个震动,则表示删除对象。每一笔划之间的夹角都会被用来识别手势。 (如图4; Lipscomb, 1991a; Rubine, 1991b)
3.5其它功能
该系统还具有其他功能以协助设计。我们在这一节介绍这些功能。
工作空间控制
一个3D鼠标控制缩放,位置和工作区的转动。例如,1/2规模的工作空间,可以用于草图,然后在评估阶段再将其返回到实际大小。旋转设计对象,并从不同的角度查看它们也是很有用的。
撤消和重做
因为所有的草图命令都可完全记住,所以可以多次撤消或者重做。它也可以通过保存在文件中用于之后的恢复。因为它们的使用很频繁,所以这些功能被分配给三维鼠标的按钮,而不是菜单或手势。
镜像
汽车基本上是对称的。因此,线条可以在镜像的另一面和原始的一面同时被画出来是很方便的,该模式可通过菜单切换。
引导线和结构的特别指出显示
指出一条引导线并且是一个物体去贴合它可以促使这个设计得到更加精确的形态。通过指出物体的结构,设计中的问题可以轻而易举地被发现,而这些问题是会限制以后的设计进程的,譬如空调单元。
4 建造虚拟设计工作区
理论上,当系统可以测量必要的参数以用于零误差地实时呈现立体图像,它会给用户一个正确立体效果。然而,实际上它不可避免地会含有一些测量上的失误。并且,虚拟世界相对于真实的世界显然也要有几个立方作用比。所以,即使正确的立体图像呈现,也不能确保人们是否能正确感知立体效果。
为了建造一个舒适的设计环境中,需要对输入设备和立体显示设备之间的坐标差异进行精确校正。换句话说,我们需要融合两个世界。
草图空间系统实现这种高精度的融合。图5示出了它的流动。下面则说明了改流动的原理。
4.1正确使用位置检测传感器
光学传感器在该系统下精度为0.51毫米,是相当高的了,但是当对象可以躲避传感器而不被检测到,则是不大可能去测量的,并且在任何情况下,通过目前的设备去实时测量是很困难的。与此相反,在磁传感器能在这种情况下进行测量。然而,有一个已知的问题:附近的磁源可能会降低其精度 (Muller, 1997)。
我们需要的精度为毫米级别的,因此厘米量级的错误是不允许的。因此,这个系统中将光学传感器与磁传感器结合在一起以同时获取两者的优点。磁传感器用来测量的眼点和笔,由于位置和方向的测量需要实时更新。由于光学传感器的精度高,所以被用于现实世界和虚拟世界的连接以及磁传感器的坐标校正。
4.2磁传感器的失真校正
在第一步骤中,磁传感器测量的笔和眼点的位置会被变换为现实中的坐标。在这里,我们把由光学传感器测定的坐标作为真实空间中的坐标,虽然这个传感器也会有一定的误差。坐标系之间的转换需要使用4times;4矩阵(A)。此矩阵的制作需要以下步骤。
首先,空间的大部分位置是由
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[152077],资料为PDF文档或Word文档,PDF文档可免费转换为Word

