英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
印度出版社
国际航空航天工程学报2016年,文章编号2052603,10页 http://dx.doi.org/10.1155/2016/2052603出版年2016
研究论文
使用无人机空中影像对地震区的损伤程度评估
1inhong Chen,1 Haoting Liu,2 Jingchen Zheng,1 Ming Lv,1 Beibei Yan,2 Xin Hu,3 and Yun Gao1
1 中国人民武装力量总医院,北京100854
2 北京航空航天装置研究所,北京100854
3 酒泉卫星发射中心,酒泉732750,中国
函件应寄给郑静晨; wjzyzjc@126.com
2016年2月14日接收; 2016年5月25日修订;2016年6月5日接受
学术编辑:Nicolas Avdelidis
版权所有copy;2016 Jinhong Chen et al。这是一个根据知识共享署名许可分发的开放获取文章,允许在任何媒体中不受限制地使用,分发和复制,前提是原始作品被正确引用。
开发了无人机(UAV)系统及其空中图像分析方法,评估地震区域的破坏程度。单转子和六转子无人机都用于捕获地面目标的可见光图像。损害程度评估考虑了五种典型地面目标:建筑物,道路,山脉,河道和植被。当实施图像分析时,首先使用图像质量评估指标(IQEM),即图像对比度,图像模糊度和图像噪声来评估图像定义。第二,一旦图像质量合格,就可以计算出灰度级别相关矩阵(GLCM)纹理特征,Tamura纹理特征和Gabor小波纹理特征。第三,支持向量机(SVM)分类器用于评估损伤程度。最后,定义了新的损伤程度评估(DDE)指数来评估地震的破坏强度。许多实验结果证实了所提出的系统和方法的正确性。
- 介绍
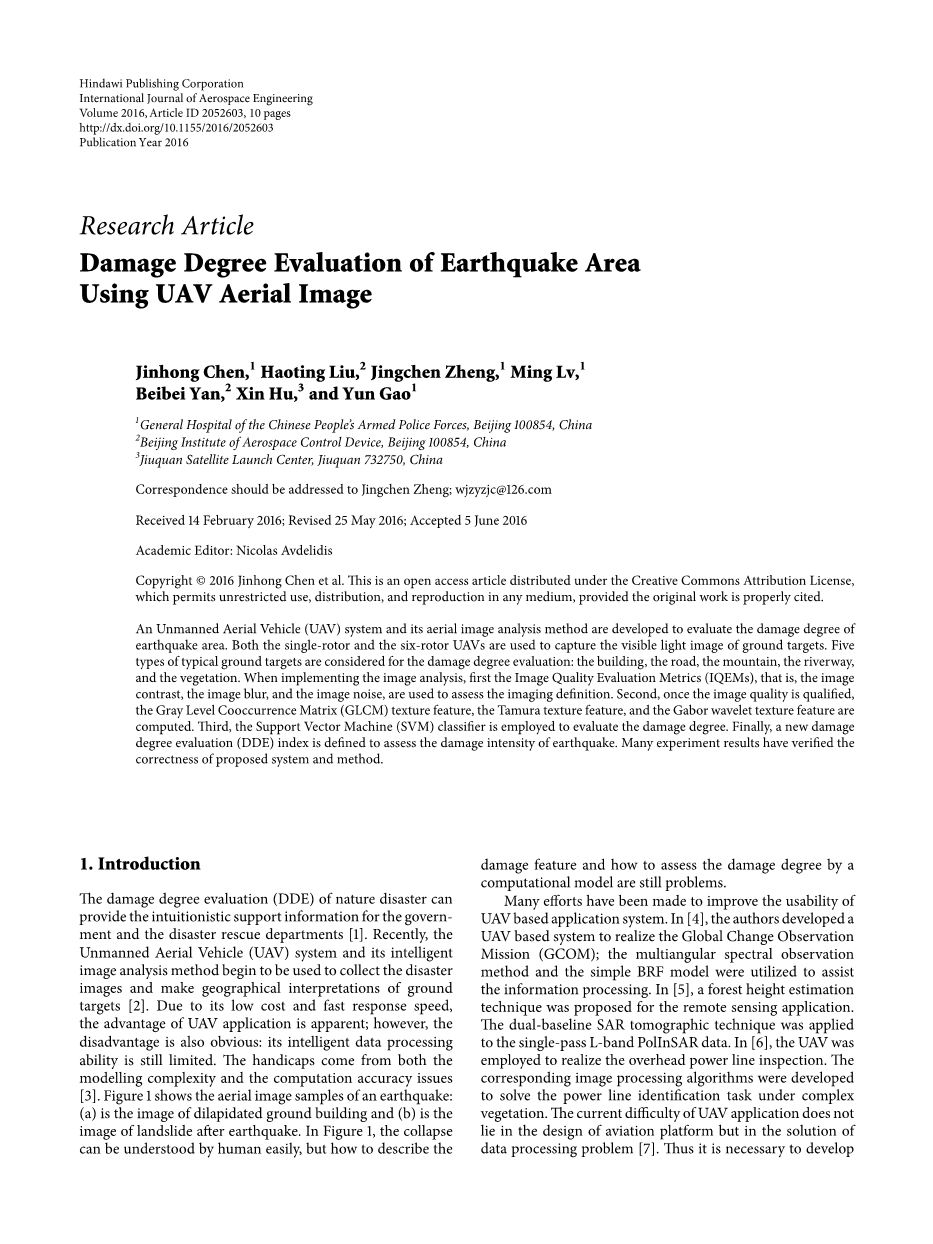
自然灾害的破坏程度评估(DDE)可以为政府和救援部门提供直接支持信息[1]。近来,无人机(UAV)系统及其智能图像分析方法开始用于收集灾害影像,对地面目标进行地理解释[2]。由于其成本低,响应速度快,无人机应用的优势明显; 然而,缺点也很明显:其智能数据处理能力仍然有限。障碍来自建模复杂性和计算精度问题[3]。图1显示了地震的空中图像样本:
1是破旧的地面建筑的形象,(b)是地震后的滑坡形象。在图1中,崩溃可以由人容易理解,但如何描述
损伤特征以及如何通过计算模型评估损伤程度仍然是问题。
已经做出了许多努力来提高基于UAV的应用系 统的可用性。在[4]中,作者开发了一个基于无人机的系统来实现全球变化观测任务(GCOM); 利用多角度光谱观测方法和简单的BRF模型来协助信息处理。在[5]中,提出了遥感应用的森林高度估计技术。双基线SAR断层扫描技术应用于单通道L波段PolInSAR数据。在[6]中,无人机用于实现架空电力线检测。开发了相应的图像处理算法,以解决复杂植被下的电力线识别任务。目前UAV应用的难度并不在于航空平台的设计,而在于解决数据处理问题[7]。
-
-
- (b)
-
图1:由UVA捕获的地面目标的地震图像。
-
- (b)
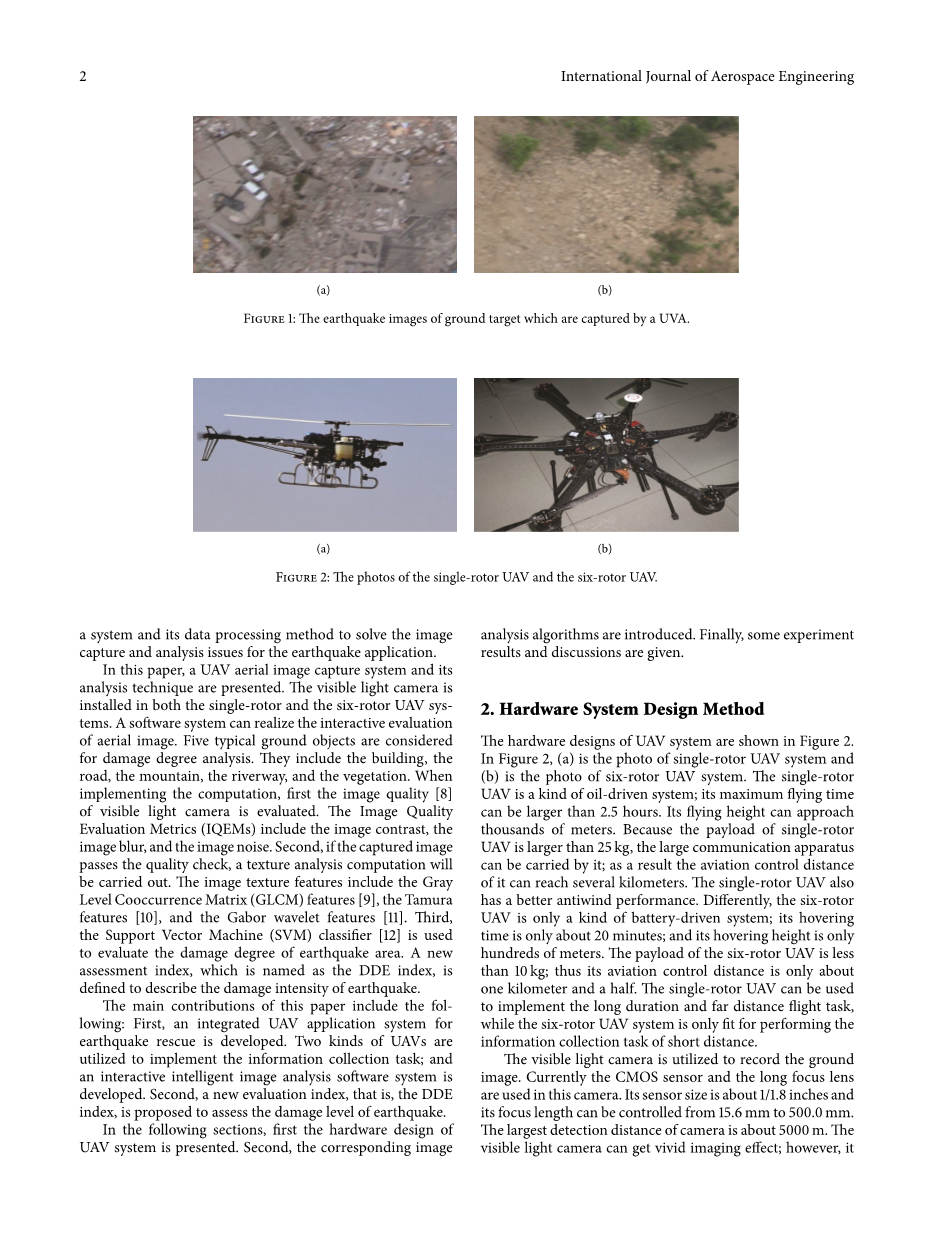
图2:单转子无人机和六转子无人机的照片。
一种系统及其数据处理方法,用于解决地震应用的图像捕获和分析问题。
本文提出了一种无人机空中影像捕获系统及其分析技术。可见光摄像机安装在单转子和六转子UAV系统中。软件系统可以实现航空影像的交互式评估。五个典型的地面物体被考虑用于损伤程度分析。它们包括建筑物,道路,山脉,河道和植被。在实施计算时,首先评估可见光摄像机的图像质量[8]。图像质量评估指标(IQEM)包括图像对比度,图像模糊和图像噪声。第二,如果拍摄的图像通过质量检查,将进行纹理分析计算。图像纹理特征包括灰度级并发矩阵(GLCM)特征[9],Tamura特征[10] 和Gabor小波特征[11]。第三,支持向量机(SVM)分类器[12]用于评估地震区域的破坏程度。被定义为DDE指数的新评估指标被定义为描述地震的破坏强度。
本文的主要内容如下:首先,开发了一种用于地震救援的综合UAV应用系统。利用两种无人机实现信息采集任务; 并开发了交互式智能图像分析软件系统。其次,提出了新的评估指标,即DDE指数,以评估地震的破坏程度。
在以下几节中,首先介绍了无人机系统的硬件设计。第二,相应的图像,介绍了分析算法。最后,给出了一些实验结果和讨论。
- 硬件系统设计方法
UAV系统的硬件设计如图2所示。在图2中,(a)是单转子无人机系统的照片,1是六转无人机系统的照片。单转子无人机是一种油驱系统; 其最大飞行时间可以大于2.5小时。其飞行高度可达数千米。因为单转子UAV的有效载荷大于25 kg,所以可以承载大型通讯装置。因此,其航空控制距离可达数公里。单转子无人机也具有更好的防风性能。不同的是,六转子无人机只是一种电池驱动系统; 它的盘旋时间只有20分钟左右; 其悬停高度只有几百米。六转子无人机的有效载荷小于10公斤; 因此其航空控制距离只有一公里左右。单转子无人机可用于实施长时间和远距离飞行任务,
可见光照相机用于记录地面图像。目前CMOS摄像机和长焦距镜头是用于本相机。其传感器尺寸约为1 / 1.8英寸,其焦距可控制在15.6毫米至500.0毫米之间。相机的最大检测距离约为5000米。可见光相机可以获得鲜明的影像效果; 然而,它
单转子无人机或六转子无人机
图像纹理特征和SVM分类器
单转子无人机或六转子无人机
地面用户
典型地面图像采集
对象
使用典型地面物体图像进行分类训练
在地震区采用无人机进行图像采集
选择感兴趣区域(ROI)
在地震区图像手
IQEMS
所选ROI图像的图像质量评估
没有
图像质量是否合格?
图像纹理特征和SVM分类器
是
ROI图像的DDE计算
分类器 三个IQEM用于评估图像质量。手工选择五种地物的图像区域,即空中图像中的感兴趣区域(ROI); 那么可以计算出几个图像纹理特征。这些纹理特征用于训练SVM分类器。SVM的监督数据是灾害救援专家建议的损伤程度评估结果[16]。第三,发生灾害时,采用UVA系统收集灾区新形象; 典型的地面物体被选择并用手标记; 那么如果这些图像可以通过图像质量检查,则将计算图像纹理特征。最后,训练后的SVM用于实施损伤程度评估。SVM的输出或SVM的输出总和是DDE索引。
在(2)中。图像噪声程度显示噪声污染对于复杂环境光的输出效果差也是臭名昭着的。因此,近红外光过滤器[13]可以用来减少环境光的影响。相机的重量小于5.0公斤。航空运动两个自由控制平台[14]用于调整摄像机的工作姿势。该平台可以实现偏航角和俯仰角的姿态规律。角度
如果图像质量差,图像分析结果将不可靠; 因此,在进一步分析航空图像特征之前,首先应该使用IQEM来评估图像质量[17]。在本文中,考虑图像对比度,图像模糊和图像噪声来分析图像质量。图像对比度可以反映图像前景和图像背景之间的区域差异。其计算公式如(1)所示。图像模糊可以表示退化图像细节的边缘定义。可以通过该度量来评估边缘点的边缘扩展程度。其计算方法如图.所微机电陀螺仪该运动控制平台内部可以使用[15]来评估其工作状态。那么它的最终控制精度可以是大约0.1。
图像数据级别。为了简单起见,采样图像区域的方差用于评估图像噪声程度。在原始图像中计算随机位置采样方法。其计算公式如(3)所示:
GC =
1
sum;
=1 [( ( max max minus; min min) ) ] , (1)
EBDDC = max
isin;Theta; {arctan[ (1, 1) minus; ( 2, 2)]} , (2)
ND =
sum;
=1
( minus; )2 , (3)
?
=Sigma;(?
- mu;)2,(3)
(1)
所述的值ķ 个图像块时, Theta; 是所设置的图像块的,?( ? ? , ? ? ) ? 吨
在天空只有约20分钟。不同的是,单转子无人机在我们的应用中具有大的机身尺寸; 它可以通过油驱动方式获得电源。因此,单转子无人机可以长时间停留在天空中。考虑到灾难救援任务的复杂性和多样性,六转无人机和单转子无人机应配备救援队伍,实施不同的信息采集任务。
-
建议损害程度评估方法
- 拟议计算流程图。所提出的计算流程图如图3所示。首先,一系列典型地面物体的图像由无人机系统收集。第二,如果上述捕获的图像可以通过图像质量检查,则可以用它来训练SVM
其中? ? 毫安X和? ? MI Ntilde;是最大和最小灰度,是边缘扩展点的宽度 ?1 ?1 和( ? ? 2 , ? ? 2 ), mu; ? 是第 ?是首端ķ个图像块, ?? Egrave;个IM年龄INTENeth; ?吨,他的第k个图像块的精度,而N a是他
(? ? ,? ? ),?是? H图像块的灰度值(?中,? POS )的的银行足球比赛像素数ķ个图像块。
1图像纹理分析方法。不同于频域或基于结构的纹理分析方法,GLCM是一种基于统计分析的低级纹理特征估计技术[18]。由于空间图像始终具有较大的视场,而是具有较低的细节,因此GLCM纹理特征可用于评估地面图像的纹理混沌度。可以描述像素之间的空间依赖特性。
表1:SVM的训练数据组织方法。
1 GLCM ASM,GLCM COR,GLCM ENT,coa,con,gabor建筑损坏程度
2 GLCM ASM,GLCM CON,GLCM 耳鼻喉科,GLCM IDM,? CON,? 的Gabor道路的损害程度
编号培训数据监督数据
3 GLCM ASM,GLCM CON,GLCM IDM,? 辅酶A,? CON,? 的Gabor山的损伤程度
4 GLCM ASM,GLCM CON,GLCM ENT,GLCM IDM,? CON,? 伽柏河道的损伤程度
5 GLCM ASM,GLCM CON,GLCM IDM,? 辅酶A,? CON,? 伽柏植被的损伤程度
角度二次指数GLCM ASM,对比指数(15)可以看出Gabor小波。考虑纸张,计算五个GLCM纹理特征。他们是30 Gabor过滤器可以得到。最后,特征向量GLCM CON,相关指数
GLCMASM = sum;
sum;
(, )2 , (4)
GLCMCON = sum;
sum;
( minus; )2 (, ) , (5)
GLCMCOR =
sum; sum; () (, ) minus; GLCM GLCM
GLCM
GLCM , (6)
GLCMENT = minus; sum;
sum;
(, ) log [ (, )] , (7)
GLCMIDM = sum;
sum;
{{{
(, )
[1 ( minus; )2]
}}}
, (8)
在任一方向, 这里 ? 和 ? 有IM的大小2 ? 年龄块, ? 运算吨(?,?)= mu; 2 ,其中?(?,?,theta;)是原始图像的灰度共生矩阵,mu; ? ģ LCM,平均值mu;,sigma;的第四个时刻,K是规模数量和方向,伽柏数字和? ? 米 ? 小号euml; (?,?)和? ? 米 ? 一个(?,?)为平均
田村特色是一种人类视觉系统形象建筑。(9),(10),(11)给出了相应的计算方法。
[19]基于纹理分析的计算方法。本文对Tamura特征的粗糙度和对比度进行了计算。粗糙度描述了图像块的粒度,而对比度反映了强度平方能量和Gabor的平均幅度特征。SVM的径向基核函数[21]如(16)所示。
coa =
1
times;
sum;
=1
sum;
=1
opt (, ) , (9)
con =
1/4
4
, (10)
4 =
4
4 , (11)
(, )
= radic;{Re [ (, )]}2 {Im [ (, )]}2, (12)
mse
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[136880],资料为PDF文档或Word文档,PDF文档可免费转换为Word

