英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
新型被动式太阳能追踪器设计
M.J. Clifford *, D. Eastwood
【摘要】这个发明是一种新型的适用于在全世界赤道地区使用低成本的太阳能跟踪器。这种追踪器被铝/钢双金属带被动激活并由粘滞阻尼器控制。 计算机建模预测与固定太阳能电池板相比效率提高高达23%。 实验测试计算机模型基本上一致。 此外,本设计进一步在复杂性和受益方面进行了严格的评估。
- 介绍
将太阳能转换成电力或者热能的方法很多,无论是工业规模还是商业规模(Wielder,1982; Markvart,1994)。一种常见的方法是通过使用光伏电池(PV)。 PV电池的功率输出取决于一系列因素,包括工作温度、辐照度和太阳辐射的入射角。太阳能跟踪器可以增强PV电池的日平均输出功率,它可以在任何时候让太阳光直射到PV细胞,就像模仿某些开花白天追踪太阳的行为(盖伦和斯坦顿,2003)。太阳能追踪器对于太阳能电池板来说并不是必不可少的,但没有了它,太阳能板的性能会降低。测试表明运用太阳能追踪器每年能提高40%的电能产量(Lorenzo等,2002; Patil等,1997; Nuwayhid等,2001)。现在的一些设备改变PV电池的方向,但这并不是唯一的方法(Mccluney,1983)。
一个理想的跟踪器将会使PV电池准确的指向太阳,补偿太阳高度角的变化(全程当日)、太阳的纬度偏移的(季节期间)变化和方位角的变化。慢速运动的太阳需要一个阻尼系统,也将会使其相应缓慢并避免振荡运动。其他可取的方法包括夜间重新定位太阳追踪器以预测对准日出,与前一天的日落方向相反,在早上减少能源损失。各个传感设备和执行装置、都是电的(主动的)和机械(被动的)目前都在被使用(Helwa等,2000a,b)。
目前市场上的技术类如下:
-
- 电子(主动)追踪器
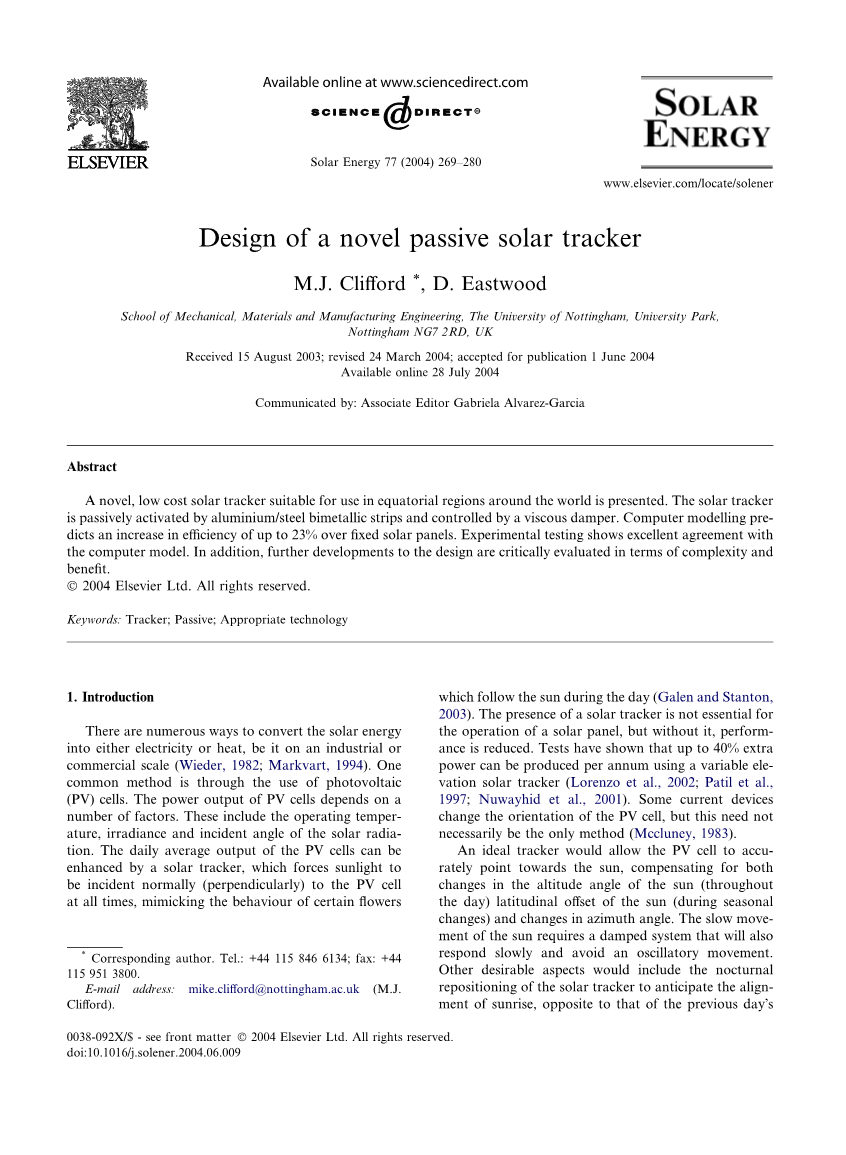
一个常见的解决方案是一个中心旋转的PV通过一个或多个电机围绕该枢轴移动单元与电子传感器(Abouzeid,2001; Salawu和Oduyemi,1987; Baz等,1984)。电动机由电池本身供电,这大概是最简单的电子方法了。尽管面板在高处容易受到风阻力的影响,但发电面板还是放在高处,这主要是为了避免人为的干扰。 然而,随着光伏发电量的减少,这并不是一个最优解。在图1给出了另一种类型的电太阳能跟踪器,并包括一个可以将太阳光线和PV面板垂直面夹角最小化的装置。 当这个角度减小到零时太阳光垂直照射到面板上。 而且,在这个设计中,中央枢轴不是水平的----这个轴承比另一个更接近地面----给了非赤道地区的正确高度。 另外,面板本身也为电机产生动力。
电子解决方案占据了大部分的太阳能追踪器市场,但他们耗尽了有PV板自己产生的电力,同时也增加了电动机和控制系统的维护和保养费用。
1.2 机械(被动)追踪器
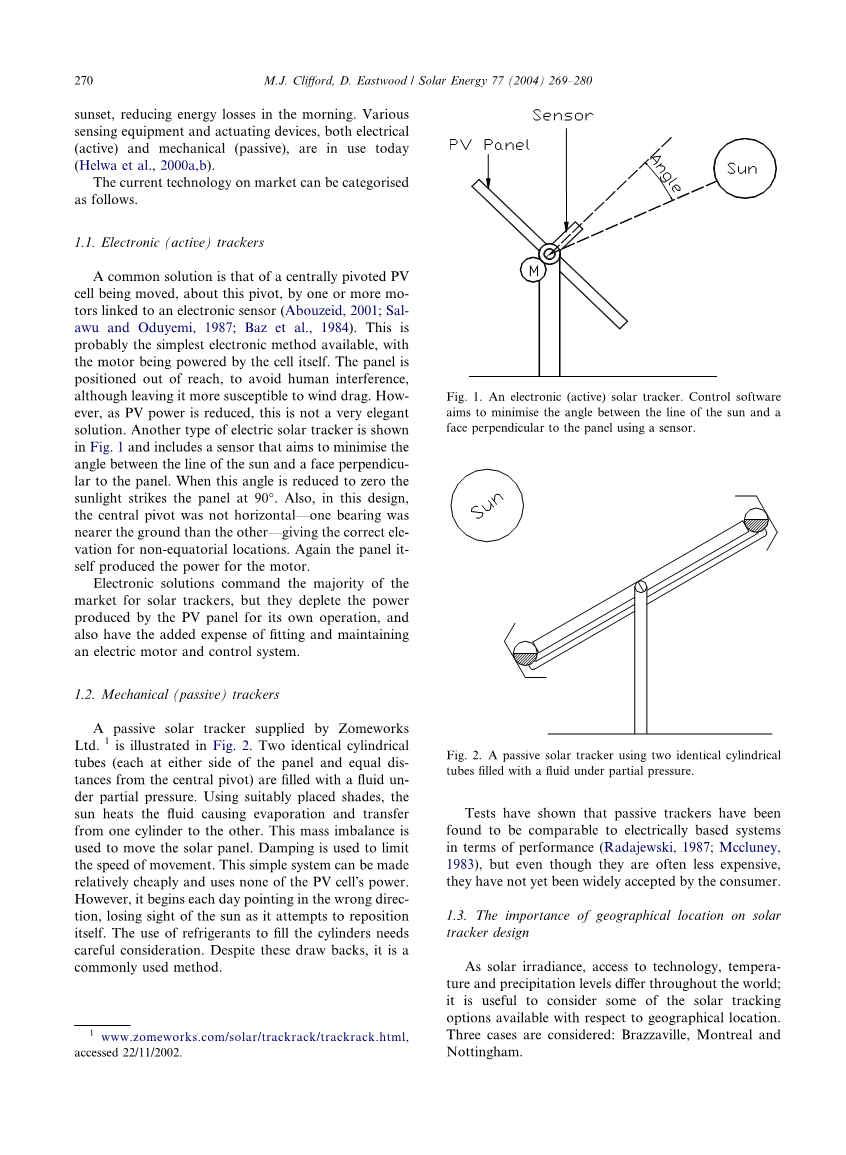
Zomeworks设计的被动式太阳能追踪器如图2所示。两个相同的圆柱形管(每个在面板的两侧和等距离从中心枢轴)在分压下充满流体。 适当的利用阴影,太阳会加热流体,导致流体蒸发从一个圆筒转移到另一个圆筒。 这种质量失衡被用来移动太阳能电池板。 阻尼用于限制运动的速度。 这个简单的系统造价相对便宜,并且不使用PV电池的的电能。然而,它每天早晨都会指向错误的方向,因为没和太阳对准,它又要重新定位。 使用制冷剂填充圆筒需要仔细的思考。 尽管这个方法有些缺陷,但它仍是一个常用的方法。
图1.电子(主动)太阳能跟踪器, 控制软件旨在最大限度地减少太阳光线和太阳能电池板垂线间的夹角。
测试表明,被动式追踪器和电力系统追踪器在性能方面基本一致(Radajewski,1987; Mccluney,1983),虽然它们通常较便宜,但还没有被消费者广泛接受。
图2使用两个相同圆柱形的被动式太阳能追踪器管在分压下充满流体。
1.3地理位置对太阳能的重要性跟踪器设计
作为太阳能辐照度,因为全球各地的技术、温度、降水量的不同,因此考虑不同的地理位置设计不同的太阳能追踪器是十分有必要的。下面将考虑三个案例:布拉柴维尔,蒙特利尔和西班牙诺丁汉。
刚果共和国布拉柴维尔;东经15.2°,北纬4.3°。这个发展中国家靠近赤道,因此在一天中的太阳高度角始终接近90°。 这个地方的气温基本上变化不大,这使其更容易设计一个全年有效的追踪系统。对技术的有限访问倾向于简单,可以很容易地修复的机械追踪器,基本的车间设施,电子解决方案不能在本地维护。。
加拿大蒙特利尔; 西经73.6°,北纬45.5°。这个地区的情况与赤道地区的截然不同,这也将是一个巨大的挑战。,虽然温度和太阳光强没有赤道地区那么好,但它夏季太阳光照时间比较长。 这些因素导致追踪器要被设计成能够长时间追踪太阳--- 将夏季太阳能的吸收最大化。相反,在短暂的冬季,PV电池将无法产生很多电力。因为太阳在夏季和冬季在天空中的相对高度较低,单轴系统在这个地方将不适用。
诺丁汉,英格兰; 西经1.2°,北纬63.0°;在这个区域所面临的挑战又是截然不同的。 其他因素如降水会造成更多的维护问题并可能降低跟踪精度。 另外,在夏季多云的时期,被动式跟踪器将无法准确定位太阳。 在这种情况下电子追踪器将会是最好的选择。
本文设计了一种新型被动式太阳能追踪器用于刚果等技术有限的发展中国家。 基于热量的设计,在第二部分中设计了一种双金属带。这个概念将在第三部分用电脑模型进行模拟评估。在第四部分中的设计参数将使用一些感性的结果设置分析。 跟踪器的原型在第五部分中将被构建,并在在第六部分中在人工照明的情况下测试实验结果。最后,得出结论并进一步讨论该系统的发展方向。
- 设计注意事项
虽然存在机械式太阳能追踪器,但基于部分加压流体涉及该模型不太现实。在一个发展中国家找到合适的流体非常困难,但更难的是将流体加压注入容器并密封。 另一种方法是设计一个基于双金属热膨胀系统。 扩大金属背后的物理学现象表明虽然产生的偏转很小,但相应的势力很大。 双金属片太阳能跟踪器中有很明显的使用好处----钢带加热的那段会弯曲,另一个端冷却。由于非洲一些地方晚上的气温非常低,这为金属片在晚上自动返回提供一种方法。 这个系统没有复杂的液体容器和精确装配活塞。 正是出于这些原因双金属片将被用作太阳能跟踪器的基础。
我们的被动式太阳能追踪器设计包含两个由铝和钢制成的双金属带并固定在一个木制框架上,两侧关于一个中心水平轴对称。双金属条这遮住,使其离太阳更远,上面那条金属带吸收太阳能辐射,而另一条则保持在阴影中,这与图2所示的设计类似。铝由于其热膨胀系数较高,因此高于钢弯曲热膨胀。 这种弯曲导致最大值在带材中点和附着处发生挠曲质量; 一个不平衡的力矩,产生运动。朝着太阳的这个方向运动旋转太阳能面板,最终增加了面板的太阳能通量。
这种设计与其他设计相比存在一些特点。当其他方法更有效时,在系统中这些方法对正确的工作至关重要。
- 对系统正确工作至关重要的一项功能包括双金属片弯曲朝向太阳的方向,这意味着结果力矩将太阳跟踪器旋转到太阳的方向而不是背离。 这会导致加热双金属片位于电池的另一侧中心轴到太阳的位置。
- 阴影有双重效果---反射太阳能辐射远离阴影双金属片到加热的一个(从而增加它的速率)加热。
- 设计的原理,即两个双金属相互作用,总是会定位到太阳的位置,即使在阴天也会准确定位。
- 由于双金属片的响应缓慢,为了配合其他被动跟踪器(例如,部分地加压流体)需要治党的的阻尼来控制力矩。
- 计算机建模
在设计阶段,开发了一个程序模拟太阳能追踪器的性能。 每个阶段从太阳能加热到重新定向的系统将太阳能电池板朝向其最佳位置并入。系统可以分解成不同的系统如图3所示。
图三,现在更详细地描述概述的阶段
3.1热力学
太阳能跟踪器的热力学效应是两个同时加热过程。太阳跟踪器角度出现错误时,将受到一个双金属带太阳辐射,而另一个是在阴影中不接收辐射。 在一个环境中太阳辐射加热,材料会达到一个平衡温度,当到达这个点时,能量就会自动下降。
获得的太阳辐射量=辐射损失 导电和对流损失
然而,直到材料达到这个平衡点,能量的差异通过棒传导。
传导的热量=太阳辐射-总损失
随着棒的温度升高,损失变得更大,因此能量传导的速度减少,即不稳定的热传导。 然而,如果棒足够薄这个复杂的模型可以简化为假定的质量集中的系统,这种材料在其整个范围内均匀升温厚度。
这可以用一个热传导模型来整合
(1)
m:质量 :比热容 :温度变化率
因此从(1)式可以得到
(2)
变换公式(2)并逐步减少时间增量,将会出现一个新的公式
(3)
由此产生的温度升高可用于为该复合杆的弯曲建模。
3.2 梁的弯曲
使用这个结果进行分步升温,双金属片的后续弯曲,可以发现杆的偏转计算分为两个阶段:
- 在给定的温度下并且不受外部荷载的情况下会发现偏转增加,这是因为单独加热会产生弯矩。
- 在这个弯曲条件下,强加其他应力,例如梁自身重量以及重块。
- 发现由温度升高引起的弯曲如下:
对于两种材料的热应变系数可以用系数alpha;来计算(Tipler,1999年):
(4)
对于上式两种材料alpha;值的取值为 ; ,L是材料的原长,Delta;T是公式(3)中的温度变化。
假设双金属片以弯曲的形状弯曲一个圆弧,适用下列条件:
(5)
(6)
R: 曲率半径 Phi;:曲率角
但是因为曲率的角度是相同的,对于两种材料的方程式(5)和(6)可以简化成
(7)
而铝的曲率半径可以是计算为
(8)
t:棒的厚度
结合等式(7)和(8),可以计算得到钢带曲率半径的 (9)
曲率Phi;的角度可以表示成
(10)
但是,在没有其他考虑---移动的中性轴的情况下,双金属片上的弯曲力矩不能被假定为相当于一个简单的负载。 中性轴,即不论施加的弯曲程度如何长度都保持不变的线轴,必须对精确模拟有双金属片中的每个金属片提供的抗弯刚度。使用方程 (10),中性轴的弯曲半径由下式求出
(11)
因此,每根棒的第二时间区域可以是:
(12)
h: 棒的中点到中性轴的距离;
b:棒的宽度
d:棒的厚度
值得注意的是两个铝片和钢材的中点位于中性材料的拉伸侧轴。 这与之前的分析一致,随着温度的升高而变大。
使用上述的等式,由热效应在杆上施加的力矩,可以的得到梁弯曲方程: (13)
R:两个曲率半径的平均值
E:杨氏模量
I:方程(12)的第二区域时间
- 第二阶段涉及到总偏转,并要考虑到其他力的存在。
目前存在的其他力包括
·棒的自重:这被统一建模分布在梁和梁的长度上的荷载,并随着太阳能追踪器在整个过程中重新定位而变化。瞬时的影响在棒的中心达到顶峰,并可以由方程式(14)给出
(14)
x: 沿双金属片的距离;
g:重力加速度;
theta;: 太阳能追踪器的角度;
V:各种材料的体积
rho;:材料的表观密度
·质量矩:钢块定位在双金属片的中点被假定为充当点负荷。弯曲瞬间再次升至中心的高峰并随太阳能追踪器的角度而变化。这个力矩由方程式(15)给出。
(15)
以阶梯间隔总结计算的时刻
沿着棒所用的净时间可以由方程(13)——(15)计算:
Net (16)
通过考虑这个梁下的偏转不规则编辑矩作为边界值问题,可以结合有限差分法用软件进行计算。
将光束分解,象限y相对于x的导数(即变化率)(坡度)由下式给出
(17)
用标准的等式表示弯曲力矩:
(18)
沿着任意一点的偏转光速值可以建立方程:
(19)
3.3系统定位
现在围绕中心旋转轴的扭矩是不平衡的,这种扭矩由每个双金属片产生: (20)
抑制这种运动是枢轴处的摩擦:
(21)
mu;:摩擦系数 M:总质量 r:摩擦力矩的半径
从静止状态开始时,产生的扭矩从每个双金属的偏差产生运动的偏移,因此重新定位时必须超过枢轴的摩擦的影响。这可以通过结合方程式来找到(20)和(21)得到 (22)
虽然角速度和加速度的初始值是零,在以下步骤中的值不是。使
全文共11154字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[16699],资料为PDF文档或Word文档,PDF文档可免费转换为Word

