
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
利用扰动观测器的人型机器人回程误差补偿方法
Byung-Jae Jungt, Jung-Shik Kong2, Bo-Hee Lee3, Sang-Min n4, and Jin-Geol Kim5
电子工程系,仁荷大学,南韩国,e-mail: jaeyanara@hanmail.net
自动化系,仁荷大学,南韩国,e-mail: tempus@dreamwlz.com
电子工程学院,世明大学,南韩国,e-mail: bhlee@semyung.ac.kr
电子工程系,仁荷大学,南韩国,e-mail: ahns@uro.mha.ac.kr
电子工程学院,仁荷大学,南韩国,e-maIl: John@lnha.ac.kr
摘要: 本文描述了一种用于利用扰动观测器控制一种用于人形机器人的有回程误差的齿轮传动直流电机。人形机器人面临的一个关键问题就在于由例如回程误差引起的非线性误差。为了解决这一问题,本文提出了一种基于扰动控制器的控制方法。该扰动控制器被设计用来估计非线性误差带来的影响,使得非线性系统可线性地运作。为了设计扰动观测器中的低通滤波器,需要找到输出的截断频率。本文的目标是为了实现这种控制方法以此来补偿回程误差。为了实现这一目标,无负载和满负载情况下的PD和扰动观测器被运用在这一系统。结果表明,补偿回程误差可以保证系统稳定性。与没有负载的情况相比,回程误差在一个负载系统的影响是肯定存在的。与没有负载的情况相比,回程误差在一个负载系统的影响是肯定存在的。实验结果表明,扰动控制器可以很好的估计非线性误差所带来的影响。实验结果表明,扰动控制器可以很好的估计非线性误差所带来的影响。另外,实际实验表明该控制方法可满足未来人形机器人稳定工作的需要。
因为存在内在的非线性误差,例如误差溢出,死区和回程误差,整个系统性能因此在实际应用中受到很大的限制。而关于这些非线性误差的准确数学模型还不存在。在人形机器人领域,回程误差总能引起严重的问题。几种经典的方法已经被提出来解决这些困难。
PID控制是其中一种典型的方法。但是这种方法在有非线性特征和大负载的情况下会遇到问题。而且在当初始状态改变的情况下,PID控制并不能有效地对系统进行控制,因为PID的各个增益系数已经确定了。因此一种基于扰动观测器的新算法被提出来以用于控制有非线性误差的人形机器人系统。
在过去十年中,工业机器人得到了进一步的发展,这主要是由于交给他们的任务变得越来越复杂。控制器是机器人的一个主要部分,近来得到了机器人研究人员更多的关注。这是由于控制器直接影响了机器人的表现性能,并且限制了他们在一些领域的可部署性和应用性。关于现代工业机器人控制器的一些控制技术已经被提出来,包括经典的PID控制,计算扭矩,反馈线性化,反向动力学,神经模糊,模型预测控制等。当前,机器人控制已经模型化,而模型化最终在于机器人的数学模型。
近来,一些基于扰动控制器的方法已经被应用于一些非线性系统中。一个系统的非线性特征有如下特征:一个系统的输出总是可以被分解为一个系统的各个输出之和。扰动观测器总是被设计来估计这些非线性特征引起的影响并为系统有效的消除这些非线性特征。但是,关于运用在人形机器人系统上的扰动观测器工作依旧很少。
在本文中,一种基于扰动观测器的用来补偿回程误差带来的影响和使系统免于有限循环现象的新算法被提出来了。一种成熟的人形机器人已经被设计出来以模块化人类的各个关节。由于在一些模块中使用锥齿轮,驱动器可以被紧凑而轻巧地垂直安装。但是使用锥齿轮会导致较大地回程误差,因此设计回程误差地补偿装置是设计人形机器人系统驱动装置地第一步。一种被提出的用来消除非线性影响的方法就是扰动观测器。为了演示扰动观测器的用处而进行了计算机仿真和实际实验。
设计人形机器人的主要目的是为了进行一些危险或者重复的任务。仿人机器人不同于 一般的工业机器人。因为它不再固定在一个位置上, 这种机器人具有灵活的行走系统,以便随时走到需要的地方,包括一些对普通人来说不易到达的地方和角落,完成人或智能系统预先设置指定的工作。自然界的事实,仿生学以及力学分析表明,仿人机器人与轮式,履带式机器人相比有许多突出的优点和它们无法比拟的优越性。
图1展示了设计人形机器人所必须的一些基本参数。该人形机器人基于模块化设计的理念,每个驱动器都专有一个控制器。一个32位的DSP控制单元有能力用于制造控制器,以此来驱动驱动装置和手机传感器数据并于其它的主要控制器通信。一个人形机器人一共有22个自由度,6个自由度在腿上,1个自由度在手腕的地方,1个自由度在胸口处,两处手臂各有3个自由度,头上有两个2个自由度。该机器人有75厘米高,6.5千克重。每个关节处由两种Maxon齿轮驱动的直流电机控制运行,并由两个用来检测回程误差的解码器来进行测量。两个解码器一个被安装在马达上,另一个被安装在转轴上。Mono Cast Nylon,是一个组合人形机器人框架。锥齿轮被运用在俯仰关节处(脚踝,膝盖,手腕,腰椎等)并且马达被垂直安装以减少机器人的体积。该人形机器人有两种驱动马达。它们的功率大约是11瓦特。一种被运用于脚踝于腰椎俯仰和膝盖的翻滚角,这些地方比其它地方需要更加大的转矩。另外,两种类型的马达齿轮减速比为190:1和231:1.
为了控制该人型机器人,两种形式的通讯媒介被运用在整个系统中。其中一个是用来连接PC模拟器与机器人身上的主控制器的无线LAN技术。另一种是基于CAN总线,用来进行主控制器与关节控制器之间的通讯。力传感器被安装在机器人脚上来测量地面对机器人的反作用力并且计算出实际的ZMP位置。一个陀螺仪传感器被安装在机器人身上来测量机器人的姿态。
为了实线机器人的自动行走,一个人形机器人需要拥有一下模块:人机交互模块,行动模块,视觉规划和大腿和手臂的动态控制。如图2所示。该机器人拥有一个32位的嵌入式主控制器和一个64兆的硬盘。Linux系统被用来作为主控制器的操作系统,因此我们可以较为简单的扩展一些设备的实现与应用像PCMCIA,USB,Multi Media Card等等。
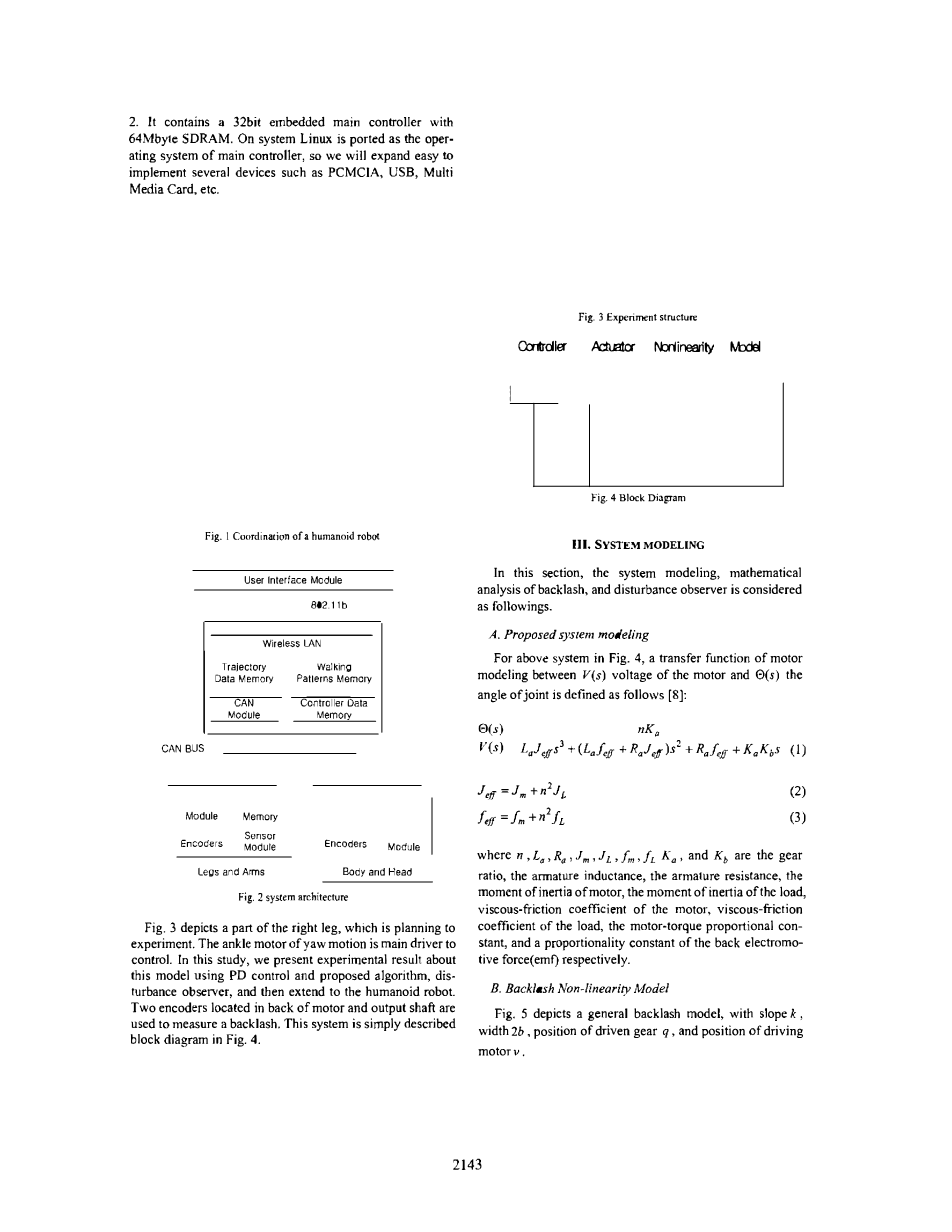
图3描述右腿的一部分,该部分被用来进行实验。脚踝处的翻滚运动控制电机是该处的主要驱动器。在本研究中,我们展示了该运用PD控制方法和扰动控制机器算法的实验结果,并把这种控制算法扩展到整个人型机器人身上。两个安装于电机背面和转轴处的解码器都是用来测量回程误差的。这个系统被简单的在图4中以系统框图的形式描绘出来了。在这个部分中描述了整体系统的建模,对于回程误差的数学分析和关于扰动控制器。为了控制该人型机器人,两种形式的通讯媒介被运用在整个系统中。其中一个是用来连接PC模拟器与机器人身上的主控制器的无线LAN技术。另一种是基于CAN总线,用来进行主控制器与关节控制器之间的通讯。力传感器被安装在机器人脚上来测量地面对机器人的反作用力并且计算出实际的ZMP位置。一个陀螺仪传感器被安装在机器人身上来测量机器人的姿态。
- 提出的系统模型
如上图4所示,一个关于电机电压与脚踝处关节转动角度的传递函数如下所属:
Je
Feff = fm n^2fL
其中n, Lo, Ra, Jm, JL, Fm,fL,Ka和kb分别是齿轮传动比,手臂阻尼,手臂摩擦力,电机的转动惯量,负载的转动惯量,电机转矩的比例常数,和回程电动力常数。
- 回程误差的非线性模型
图5描述了一个普遍的回程误差模型。该模型为一个斜率为k,宽度为2b,被驱动齿轮q的位置,和驱动电机v的位置。
如果v的振幅比b小的,那么就没有输出。回程误差的非线性可以用一下公式来进行描述:
If vgt;0并且q=k*v-k*b或者vlt;0并且q=k*v k*b,那么q = v,否则q=0。
为了测量回程误差,一个解码器被安装在输出轴的末端,如图二所示。尽管当一个电机转动时,利用解码器在回程误差范围内测量输出轴的回程误差大小是十分困难的。当输出开始启动时,解码器的输入值就是回程误差的大小。这就是为什么要在一个模块里运用两个解码器的原因。
图4描述右腿的一部分,该部分被用来进行实验。脚踝处的翻滚运动控制电机是该处的主要驱动器。在本研究中,我们展示了该运用PD控制方法和扰动控制机器算法的实验结果,并把这种控制算法扩展到整个人型机器人身上。两个安装于电机背面和转轴处的解码器都是用来测量回程误差的。这个系统被简单的在图4中以系统框图的形式描绘出来了。在这个部分中描述了整体系统的建模,对于回程误差的数学分析和关于扰动控制器。
- 扰动观测器
用近似的线性模型来替代非线性系统N。如图6所示是该方法的一大优势是因为N系统中的非线性影响因素变成了在线性系统中有界的扰动。 N表示的是一个非线性时变系统,可以被分解为如下所示:
N = H d
H和d分别是一个线性时不变系统一个非线性时变系统。
一个扰动观测器被设计来估计该系统中的非线性误差的影响并把它们有效的清除。因此,利用扰动控制器可以是的系统N表现的线性,比如说,不再受有限的循环影响。如图7所示,一个扰动控制器被加入到系统中。
如图7所示,Hn和Pn分别表示传递函数, 数学模型,根据Hs和Ps。Pn的输出,由n描述,接近于n.dt是一个对于tgt;0的时候对dt的估计,由下式表达:
dt = n –Hnt
其中Hnt表示脉冲响应Hn和Vt的卷积。
为了实现扰动控制器,滤波器Qs被加入到该系统中来使得QsHnPn^-1是一个可实现的传递函数,因为Hn^-1和Pn^-1常常是可以实现的。
一个成功的扰动控制器的设计是基于Qs的设计的。实践证明Qs应该是一个低通滤波器。其中p最少应该等于Hn的度,ak和t都是正实数。通过低通滤波器,一些频率可以用来补偿回程误差,但是另一些不能通过。
实验结论
在上述实验的实施中,样本采样率被设定为1 MS。首先,在未装载的系统中,电机建模和tune PD control增益被确认。随后,我们装载了负载,在相同的条件下检查极限环的存在性。有了极限环,通过使用干扰观测仪,偏移的影响被消除。
我们能够发现,真实电机的转移方程涉及了许多说明。表1展示了电机的几个参数。如果参数被应用到公式(1)、(2)和(3)中,我们就可以定义转移功能如下:
这个转移方程被使用在电脑模拟和干扰观测仪的实验中。
表9和10展示了单位反馈系统的输出结果和它的误差。误差出现的理由是因为存在在模型和真实系统间的差异值、测量干扰、未知参数、实验环境和计算错误等等。在这些原因中间,建模错误是最常见的。
偏移的大小通过使用两个编码传感器进行测量。在未装载系统中,偏移量为0.000587(rad);在装载系统中,该值为0.015758(rad)。为了参考,输入编码器的脉冲数是1000/次,在输出编码器中为512/次。输出的分辨率为0.00306(rad)每脉冲。并且着个参考输入值的大小为0.174532(rad),10(degree)。这个稳态误差,0.72%,是由于输出值的分辨率引起的。
图表11、12反映了附有PD CONTROL的未装载系统的反馈值和误差值(Kp=110, Kd=1.4)。在模拟中,不存在过冲,但是另一方面,在实验中,存在10.74%的过冲。
图表13、14展现了负载系统的输出值和误差。我们能够检测模拟中的有限环的存在。有限环的频次是12.17赫兹,其大小为0.009661(rad)。
比较图13和15,我们可以得知,在模拟结果中,偏差的影响被干扰观测器消除。更低的通过筛选器被选定为:
结论
在这篇文章中,我们提出了一种控制算法,为了补偿人形机器人中的回程误差导致的影响。人形机器人有一个很大的回程误差,因为它驱动方式的特点所决定的。因此,它需要一些必要的补偿方法。一个扰动控制器被提出,并在我们人形机器人的关节模块处实现了。
与没有负载的情况相比,回程误差在一个负载系统的影响是肯定存在的。实验结果表明,扰动控制器可以很好的估计非线性误差所带来的影响。
对人性机器人回程误差的补偿,是实现人形机器人工作的第一步。在实验结果的基础上,我们可以把提出的控制算法扩展到整个人形机器人系统——由非线性误差例如回程误差的人形机器人系统。
致谢
这篇文章的撰写受到了韩国科学与工程基金的Grant No. RO I - 2003 – 000-10364-0的支持。
参考文献
- C.W. Tao,“具有不确定输出误差的对线性电机的模糊控制器的设计,“电子电气工程师学会,Vol. 32, No. 3,六月,2002,380 pp.373-380
- K.T. Woo, L. Wang. F.L. Lewis,Z.x. Li,“一个对回程误差的模糊系统补偿装置的设计,”发表于1998年电子电气工程师学会机器人与自动化控制技术国际会议,六月,1999,pp.181-186
- N.J. Ahmad和F. Khorrami“对具有回程误差的输入的系统的自适应系统的设计”,发表于美国控制工程—机器人与自动化控制会议,六月1999,pp.3018-3022
-
S.M.Shahruz.“运用扰动控制器对一组非线形系统性能的提高”电子电气工程师学会与美国机械工程师学会 机电一体化通讯, Vol.5, No.3,九月,2000,
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[138702],资料为PDF文档或Word文档,PDF文档可免费转换为Word

