
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
瞄准线路径跟随具有自适应侧滑补偿漂移力的Dubins路径
Thor I. Fossen,Kristin Y. Pettersen和Roberto Galeazzi
摘要 - 我们提出了一个非线性自适应路径控制器,通过车辆侧滑补偿漂移力。 当车辆受到由洋流,风浪和波浪引起的漂移力时,在路径跟随期间出现车辆侧滑。 所提出的算法受到古代导航器使用的视线(LOS)制导原理的启发,这里将其扩展到杜宾斯路径之后的路径。 未知的侧滑角度被视为一个常量参数,这是使用自适应法则估计的。 证明了交叉轨迹和参数估计误差的平衡点是一致半半指数稳定的。 这保证估计的侧滑角以指数方式收敛到其真实值。 自适应控制律实际上是用于路径跟随的整体LOS控制器,因为参数适应法则提供积分作用。 拟议的制导法旨在以给定的速度在水平面内进行操纵,典型的应用是船舶,自主水下航行器,无人驾驶飞行器以及其他车辆和工艺品,目标是在没有时间限制的情况下遵循预定义的参数化曲线。 包括两个车辆案例研究来验证理论结果。
关键词:自适应控制,运动学,陆地车辆,海洋车辆,路径规划,无人机。
一,导言
MARINE 船只,自主性水下汽车(AUVs)和无人机(UAVs)在很大程度上依赖于制导系统来实现所需的运动控制场景,如目标跟踪,路径跟踪,路径跟踪和路径机动[4],[5],[27]。 本文简要介绍了空中和海洋车辆暴露在风,海浪和水流中的情况。 轮式车辆的路径跟踪方法概述见[23],而农用车辆的自动导航系统在[14]和[19]以及其中的参考文献中给出。
对于船舶和海上平台,通常用直线和圆弧段指定一个2-D期望路径[10]。AUV和无人机三维运行。 但是,假设高度/深度是相当普遍的。
手稿于2013年10月31日收到;2014年6月15日修订;2014年7月5日接受。出版日期2014年7月30日;当前版本的日期2015年2月11日。手稿于2014年7月9日以最终形式收到。TI Fossen的工作部分得到了OttoMoslash;nsted基金会的支持,部分由挪威研究委员会通过自主海上作业和系统中心,挪威特隆赫姆挪威科技大学,项目223254。副主编L.马可尼推荐。
TI Fossen和KY Pettersen与挪威特隆赫姆7491挪威科技大学工程控制系自动化海洋运营中心(电子邮件:fossen@ieee.org; kyp@itk.ntnu.no)联系。
R. Galeazzi是丹麦技术大学电气工程系的Kgs. Lyngby 2800,丹麦(电子邮件:rg@elektro.dtu.dk)。 本文中一个或多个数字的颜色版本可以在http://ieeexplore.ieee.org上在线获取。
数字对象标识符10.1109 / TCST.2014.2338354
图1.自适应积分LOS制导律作为商用自动驾驶系统的参考发生器。 估计的侧滑角beta;也分别给出喘振和摇摆速度的估计u和v。
独立控制,使得跟随目标的路径限于水平面中的运动控制。对于在水平面中应用的路径,控制目标是遵循没有时间信息的预定平面路径。 参考文献[1]中讨论了使用基于逻辑切换和基于Lyapunov技术的自适应监督控制的大型建模参数不确定性存在下欠驱动车辆的路径跟踪方法。 文献[9]提出了一种基于模型的鲁棒自适应路径跟踪方法。在[2]中已经研究了使用极性运动学模型的欠驱动海洋车辆控制器后的平面路径。
实现融合到理想路径的一种流行和有效的方法是实现一个模仿经验丰富的水手的预见性LOS引导法则[15]。LOS制导法则的主要优点是简单,计算占地面积小。另外,我们证明了稳定性强的性质,如一致半全局指数稳定(USGES)。如图1所示,LOS制导法也可与商用航向自动驾驶系统一起使用。如果速度和航向同时稳定,则复杂性急剧增加[17],[24]。在本文中,我们假设测量车辆的速度,并得到补偿漂移力后的路径的新的LOS制导律。 这是基于这样的原则,即可以通过指定[24]中定义的几何和动态任务来稳定欠驱动车辆。几何任务使用导向定律来解决。但是,我们的方法不采用动态任务(速度要求)的解决方案。因此,操作员可以使用油门手动控制速度。
A.比例服务指导
[15]中首先提出了使用滑动模式控制来稳定组合速度,转向和潜水响应的AUV的引导LOS运动控制。文献[11]和[21]讨论了航行器直线航迹跟踪的LOS指导原则。在[12]中可以找到关于船舶的LOS指导原则的概述。类似的技术已被用于无人机和导弹[25],[27]。
UGAS和均匀局部指数稳定性的比例LOS制导律首先在[21]中与简化的车辆模型一起证明。 这也被称为[26]中定义的全局kappa;指数稳定性。 这个结果进一步扩展到包括[6]和[13]的欠驱动船模的分析。Boslash;rhaug和Pettersen [7]对欠驱动水下航行器进行了扩展。
B.比例积分LOS指导
尽管比例LOS制导法律的有效性和简单性,但当车辆暴露于由波浪,风力,洋流或其他外部干扰引起的未知漂移力时,它们具有局限性。欠驱动的车辆在侧向(摆动)方向上没有直接的控制力。因此,在未知漂移力的影响下收敛到弯曲路径是非平凡的。使用比例制导法则,这些车辆将在路径跟踪期间以及在稳定状态下显示出大的交叉跟踪误差。偏移取决于路径曲率以及漂移力的方向和强度。为了克服这些困难,有必要修改LOS指导法律以纳入整体行动。这被称为比例积分(PI)指导或积分LOS。这是在[8]中为船舶引入的,其中收敛到期望的直线路径被证明。特别是,对于恒定速度下的直线路径,积分LOS引导定律被证明是全局kappa;-指数稳定的。
C.主要结果
本简要的主要结果是基于自适应控制理论的非线性积分LOS制导律,它有效补偿由于波浪,风和洋流引起的恒定和缓慢变化的漂移力。在假设没有可用的环境力的测量值以及对于弯曲路径的侧滑角缓慢变化的假设下,导出定律为杜宾斯路径,时变速度和时变前视距离。另外,路径必须是C1可微分。自适应积分LOS制导法则具有非常小的计算足迹,这使得所提出的公式具有高度实用性。新的制导律包括一个完整的术语,它与Boslash;rhaug等人完善的整体LOS算法结构不同[8]。利用Lyapunov分析来证明USGES,而以前的结果只能保证全局kappa;指数稳定性。这是有利的,因为USGES隐含地保证了更强的收敛性和鲁棒性。 例如,从[16,引理9.2]可以看出,USGES的性质意味着我们总是可以选择一个吸引区域,在这个吸引区域中我们有足够大的指数收敛。因此,无论扰动的大小如何,我们都可以满足扰动系统解的一致有界条件。因此,USGES提供了比全局kappa;指数稳定性更强的鲁棒性。
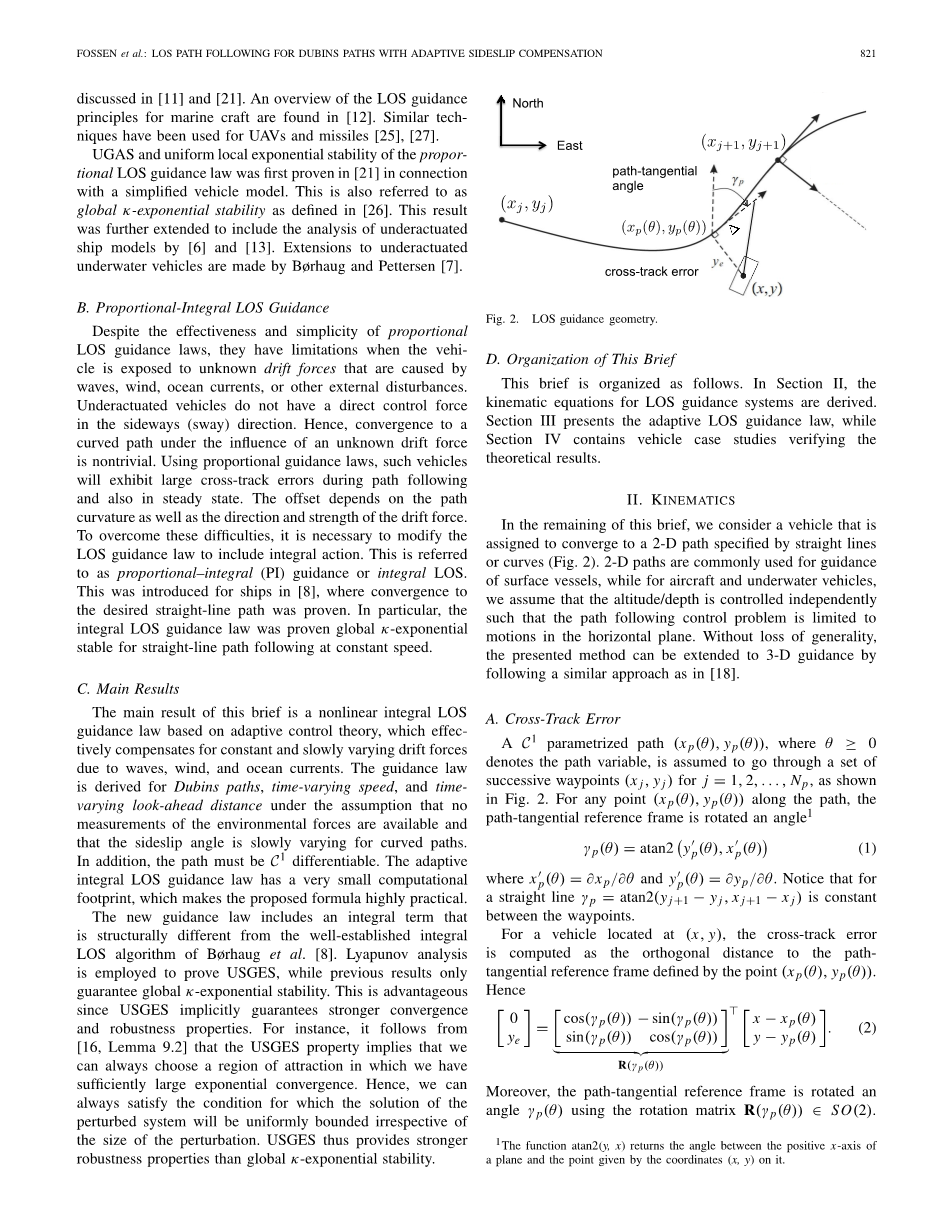
图2.LOS指导几何图
D.本简介的组织
本简要内容安排如下。在第二节中,导出了LOS制导系统的运动学方程。第三部分介绍了适应性视距导向法,第四部分介绍了车辆案例研究,以验证理论结果。
二,运动学
在本文的其余部分中,我们考虑一个车辆,该车辆被分配为收敛于由直线或曲线指定的二维路径(图2)。二维路径通常用于引导水面船只,而对于飞机和水下运载工具,我们假定高度/深度是独立控制的,以便跟踪控制问题的路径限制在水平面上的运动。不失一般性,所提出的方法可以通过遵循[18]中的类似方法扩展到三维指导。
A.交叉跟踪错误
AC1参数化路径(xp(theta;),yp(theta;)),其中theta;ge;0表示路径变量,假定经过一组连续路点(xj,y j),对于j = 1,2,...,Np,如图2所示。对于沿路径的任何点(xp(theta;),yp(theta;)) ,路径切向参考系被旋转一个角度1
(1)
其中xp(theta;)=part;xp/part;theta;和yp(theta;)=part;yp/part;theta;。注意,对于直线gamma;p= atan2(yj 1 - yj,xj 1 - xj)在航点之间是恒定的。
对于位于(x,y)处的车辆,交叉轨道误差被计算为与点(xp(theta;),yp(theta;))定义的路径切线参考系的正交距离。于是
此外,使用旋转矩阵R(gamma;p(theta;))isin;SO(2)使路径切线参照系旋转角度gamma;p(theta;)。
1函数atan2(y,x)返回一个平面的正x轴与由其坐标(x,y)给出的点之间的角度。
展开式(2)给出了路径法线
通过(xp(theta;),yp(theta;))和交叉跟踪误差
路径变量根据[12]传播,
正如Samson [22]指出的那样,如果路径是一条闭合曲线,则可能有(3)的无限解。在下文中,我们将假定路径是开放曲线,即终点与起点不同。 定义1保证了通过最小化,获得的交叉轨道误差ye有一个独特的解。(4)的唯一解被表示为ye()并且被定义如下。
定义1(解决方案的唯一性):
受制于
这是一个非线性优化问题,可以通过数值求解。然而,对于许多路径,可以通过计算由(3)给出的所有可能的投影候选theta;i(i = 1,...,M)并且选择最接近前一个-值的那个找到。
B.运动方程
用浪涌,摆动和偏航速度u,v和r表示的运动学方程为[12]
psi;是偏航角。(4)的时间微分给出了
因为(3),(11)中的最后一个括号为零
根据(1)。 因此,(8),(9)和(11)给出
这可以写成幅度相位形式:
其中幅度U =(u2 v2)gt; 0和相位beta;= atan2(v,u)分别被识别为速度和侧滑角。 由于牛顿定义运动的动力学方程的第二定律,暴露于漂移力(风,波浪和洋流)的车辆表现出速度u,v和r的变化。在路径跟踪期间,可以观察到响应为非零侧滑角beta;。方位角psi;根据chi;=psi; beta;将航向角chi;关联起来。如果使用全球导航卫星系统测量地面航向,则可以使用航向自动驾驶仪控制车辆。但是,对于船舶和水下航行器,通常使用航向自动驾驶仪进行导航,并使用可以使用指南针测量的偏航角反馈。在这种情况下,估计侧滑角beta;以获得准确的路径跟随控制(将ye调节为零)以指数形式是非常有意义的 在飞机和船舶的正常操作下,侧滑角很小。在正常操作期间仅观察到几度的侧滑。
C.侧滑角的参数化
本简介的主要思想是通过将beta;作为未知常数参数来导出跟随控制系统的自适应积分LOS路径来估计beta;。这给出了比例积分制导律。 此外,我们将使用自适应控制理论来证明积分项的稳定性和收敛性。
假设1:= 0时,侧滑角beta;在路径之后很小且恒定。
备注1:用于构造Dubins路径的直线和圆形路径的侧滑角是不变的[10]。段之间的切换将作为参数更新规则中的步骤出现。 对于穿越非圆形可行路径(即小曲率路径)的车辆,beta;将缓慢变化。然而,beta;的动态变化将比控制带宽慢得多,因此适应规律将追踪变化。还要注意的是,尽管侧滑角度相对较小(通常小于5°),但它主要影响车辆的跟踪性能,如果得不到适当的补偿,这会导致明显的偏离期望的路径。
考虑(14)的形式如下:
假设1意味着cos(beta;)asymp;1并且sin(beta;)asymp;beta;,因此(15)变成
三,LOS指导算法
路径跟踪的LOS算法通常用于运动学级别,目标是规定(14)中的方位角psi;的期望值。 因此,采用以下假设。
假设2:标题自动驾驶仪完美跟踪期望航向角,使得psi;=psi;d。
备注2:可以通过分析级联系统来放宽假设2,其中第二个系统通过遵循[13]中的方法包括车辆和自动驾驶动力学。 整个系统的分析是高度依赖于车辆的,所以主要结果(定理1)仅限于分析运动学级别的误差动态,从而为不同的车辆和自动驾驶系统提供设计灵活性。
A.比例服务指导
由于路径切向角gamma;p是已知的并且测量了交叉误差ye,所以我们选择
其中0lt;le;le;是用户指定的前视距离,alpha;是稍后设计的控制输入。(14)和(17)的稳定性分析利用了
在假设1和2下将(18)和(19)代入(16)给出
如果侧滑角是完全已知的,我们可以选择alpha;来取消(20)中的第二项。特别是,alpha;=beta;给出
(21)的稳定性由命题1给出。
命题1(具有已知侧滑角的比例LOS制导律):系统(21)的平衡点ye=0,其中alpha;=,如果0lt;le;le;且0 lt;Uminle;Ule;Umax,则beta;是USGES。
证明:系统(21)自U,alpha;和。是非自治的是时间依赖性的。考虑所有yene;0的Lyapunov函数候选
由于V1(t,ye)gt; 0且1(t,ye)le;0,因此:
然后,我们推断
对于每个rgt; 0和所有| ye(t)|le;r,我们有 所以
考虑到(23),上式适用于初始条件ye(t0)产生的所有轨迹。 因此,我们可以通过注意到线性系统w = -2c *(r)w具有解w(t)= e-图2c *(R)(吨 - t )w(t)来引用比较引理[16,引理3.4] 0),这意味着
因此
对于所有的tge;t0,| ye(t0)|le;r,对于所有rgt;0。因此,我们可以得出结论:平衡点ye= 0是USGES。[20,定义2.7]。
备注3:注意由于交叉跟踪误差动态的结构特性(14),其中包含一个引入饱和的正弦函数,所以无法实现全局指数稳定性。这就是(21)式中系统增益随交叉轨道误差的大小而减小的原因,因而不能实现全局指数收敛。
B.侧滑角的自适应补偿
令表示beta;的自适应估计,beta;和=beta;-表示参数估计误差。自适应控制器可以设计成输入alpha;= (20)消除侧滑角beta;。主要结果归纳在定理1中。
定理1(自适应积分LOS制导律): 假设1和2是自适应积分LOS制导律
全文共13982字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15420],资料为PDF文档或Word文档,PDF文档可免费转换为Word

