
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
基于深度学习的自动驾驶汽车:搭载英伟达AI主板具有对象寻找和自主避障功能的JETBOT在农业方面的应用
摘要:
在本次研究中,我们试图开发一个基于深度学习的自动驾驶汽车系统,在农业工作场所将物品(如收获的洋葱、农业工具、PET塑料瓶)运送给农业工人。该系统基于一个汽车形状带有一个NVIDIA人工智能主板的机器人JetBot。JetBot可以找到各种各样的物体并避开它们。我们在一个真实的仓库中进行了实验,在该仓库中各种障碍物品(手套、靴子、镰刀、剪刀和锄头)被分散。假定的农业工人是把干洋葱吊在横梁上来模仿。具体来说,我们开发了一个基于深度学习技术的精确检测障碍物系统,可实现自我回避,并为手工农业工人和管理人员自动递送小件物品。无论是汽车形状,还是基于深度学习的避障功能,其主要目的和结构特征都不同于现有的移动农机技术和产品。与文献中发现的过去类似的机械系统和类似的商业产品相比,它的优点是成本低。该机器人非常敏捷,并且很容易识别和学习障碍物。此外,JetBot套件是一个最基础的产品,还具有允许用户任意扩展和更改功能和机械设置的功能。
本研究包括六个阶段:(1)设计和确认整个系统的有效性 (2)构建和调整各种小型系统设置(例如,程序和JetBot规格) (3)积累障碍图片数据 (4)执行深度学习 (5)在室内仓库进行实验,模拟真实的农业生产情况 (6)对试验数据进行定量(展示试验的成功率和错误率)和定性的评估和讨论。我们认为,在有限的试验中该制度可以被认为是有效的。然而我们无法进行更广泛或一般化的实验(例如hellip;在泥泞的田地里和在非平地上运行JetBot)。我们提出了这些试验的成功率的实验范围,特别注意碰撞障碍类型和其他错误类型。我们还能观察到系统实际操作的特点。本研究的新成果在于融合了近年来基于深度学习的农业信息学。在未来,农业工人和他们的管理者可以在实际的农业场所使用这个系统作为一个通用的自动输送系统。此外,我们相还信通过将这一应用与其他现有系统相结合,未来的农业领域和其他工作场所将变得更加舒适和安全(例如,运送水瓶可以避免热(压力)紊乱)。
索引术语-深度学习,识别物体,避开障碍,递送物品,英伟达Jetson Nano,自动驾驶
一.介绍
近年来,农业研究人员、农业管理人员和农业工人开发了广泛的自动化和机械技术。因此,生产率、农业成本和其他因素都得到了改善。特别是,自动化随着信息学、机电一体化和电气工程的结合而继续发展。
在实践中,对于实际的农业管理场所来说,获取和共享各种实时信息是直接关系到现代农业管理成败的关键因素。最近的科研和商业研究已经开发并验证了深度学习系统、物联网系统和基于智能合约的系统(如区块链)[1-8]。
具体来说,Kamilaris等人[1]介绍了农业和食品供应领域最新的以技术为基础的趋势,重点关注食品科学和技术。Omar等人[2]和cichoz等人[3]为医疗保健[2]构建并展示了基于物联网和智能合约技术的平台系统的具体实例,包括糖尿病患者[3]的实际治疗方案。
关于不同车辆的物联网和智能合约,刘等人构建并提出了物联网和智能可收缩系统,旨在利用电动汽车云和边缘计算[4]提高安全性,并且Cebe等人研究了用于联网车辆取证应用的轻型物联网和智能合约框架[5]。从基于物联网的安全和完整性的角度出发,于等人提出了基于物联网和智能合约的解决方案,以提高物联网[6]的安全和隐私级别。Machado和Frohlich使用基于区块链的系统[7]验证了关于网络物理系统的物联网数据完整性。在机器人技术方面,Strobel等人利用物联网和智能合约技术为群体机器人决策场景[8]管理了拜占庭式机器人。
还有一些更密切相关的研究着眼于农业研究和基于商业的管理的高科技系统[9-13]。Fukatsu等人[9-10]设计、开发和处理基于网络的传感器系统。他们使用带有现场服务器的系统,用于实际的农业应用,从真实的户外农地[10]获取各种数据。此外,Brun-Laguna等人还演示了基于物联网的桃子霜冻事件预测系统,并考虑了最近的精密农业技术。Karim和Karim[13]使用物联网(构建并管理了一个监控系统。一些研究已经收集和分析了不同的人类或机器人物理数据[14-18]。赵等人基于加速度传感器[14]提出并实现了一种针对农业机器人的模型。一些研究使用了深度学习[15-18],例如,Orii等人利用最近基于深度学习的方法(卷积神经网络(CNNs))对压力和六轴加速度传感器[15]的时间序列数据识别了触觉纹理。Dawar和Kehtarnavaz使用基于深度学习的传感融合[16]检测和识别人类连续流行为。蒋和殷使用深度神经网络[17]从可穿戴传感器识别类似于Hassan[18]等人的人类活动。
Jetson Nano和JetBot是最近两款强大且有效的基础设施,允许执行基于深度学习的各种试验,并收集关于现实世界对象和领域的有用且有意义的数据[19-23]。
在本研究中,考虑到上述文献、技术背景和趋势,我们选择了Jetson Nano和JetBot。Jetson Nano是由美国加州NVIDIA公司设计、制造和分销的。JetBot由美国小R科技公司设计、建造和分销。JetBot是一个两轮汽车形状的系统,安装有Jetson Nano板和其他外围部件,如传感器和摄像头。我们将在后面的章节中描述并说明。
我们利用传统的、物理的农业工人和管理人员的农业可视化记录来开发并尝试实现一个深度学习的Jetson Nano和基于jetbot的系统。我们为实际的农业管理者和工人提出了基于深度学习的新型避障方法,如图1所示。对于这些人,利用技术和多个传感器的特殊信息可以改变技能要求和提高安全水平。
我们提出了该方法的以下优点:
1)与以往学术研究人员开发的类似机械系统和其他类似商品相比,该系统成本低。
2)系统非常灵活,很容易识别和学习障碍。
3) JetBot套件是一个最小的产品,所以它包括一个功能,允许用户任意扩展和改变功能和机械设置。
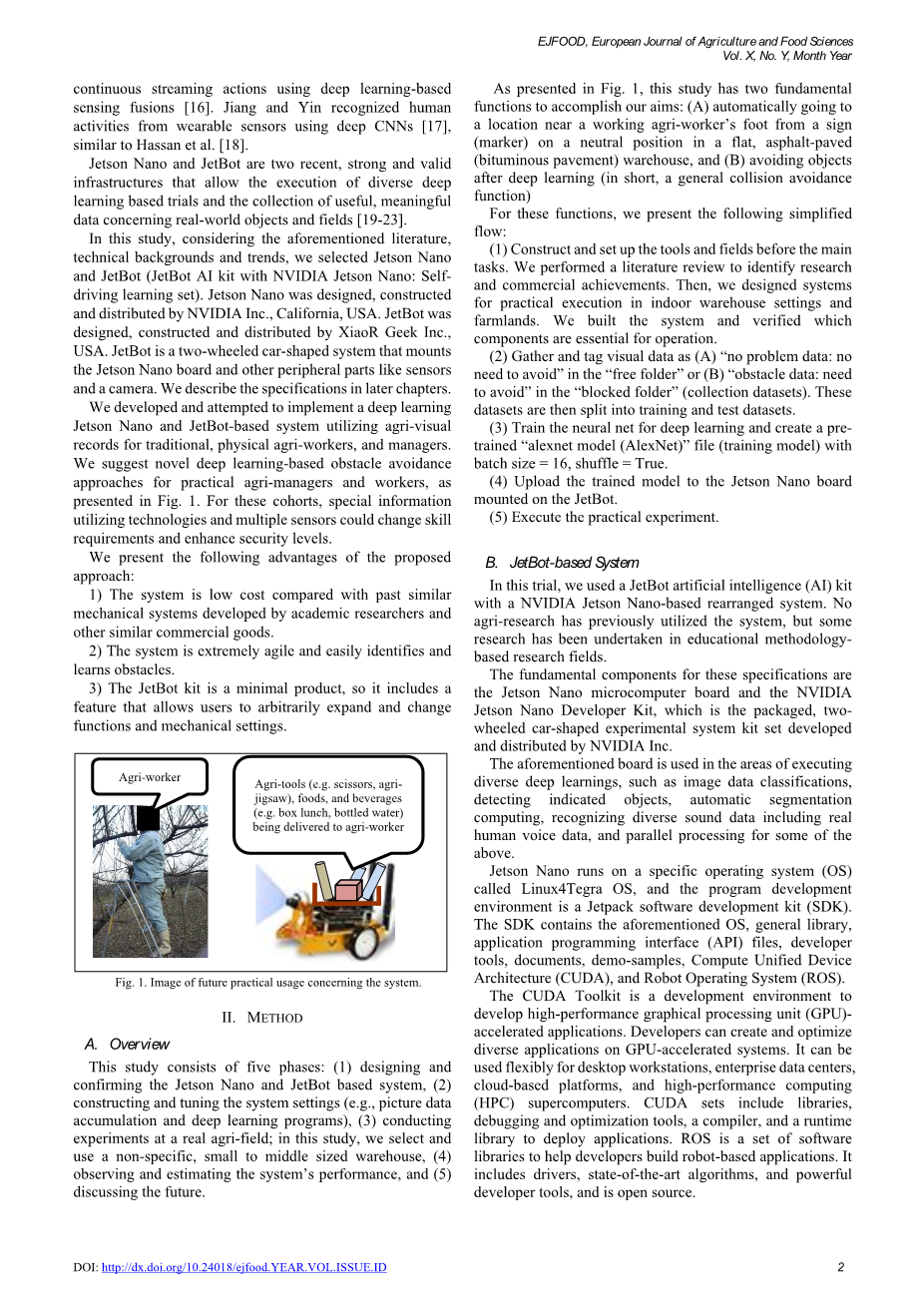
图1该系统未来的实际应用形象
二. 方法
A.概述
本研究共分为五个阶段:(1)设计并确认基于Jetson Nano和JetBot的系统;(2)构建并调整系统设置(如图片数据积累和深度学习程序);(3)在真实的农田进行实验:在这项研究中,我们选择和使用一个非特定的中小型仓库,(4)观察和评估系统的性能,以及(5)讨论未来。
如图1所示, 这项研究有两个基本功能来实现我们的目标: (A)自动从在平坦的沥青路面的中间位置的指示牌走到农工脚附近,和(B)深度学习后的避障(简而言之,是一个通用的避碰函数)。
对于这些函数,我们给出以下简化的流程:
(1)在主要任务开始前对工具和字段进行构建和设置。我们进行了一次文献回顾来确定研究和商业成果。然后,我们设计了在室内仓库设置和农田中实际执行的系统。我们建立了这个系统,并验证了哪些组件对操作是必不可少的
(2)收集可视数据并标记为(A)“自由文件”中的“没有问题数据:没有必要避免”或(B)“障碍文件”中的“障碍数据:需要避免”(收集数据集)。然后这些数据集被分成训练和测试数据集。
(3)训练用于深度学习的神经网络,并创建一个大小为16,组为True的预训练的“alexnet 模型”文件(训练模型)。
(4)将训练后的模型上传到安装在JetBot上的Jetson Nano板上。
(5)进行实际实验。
B.基于Jetbot的系统
在本试验中,我们使用了JetBot人工智能(AI)套件和NVIDIA Jetson Nano重组系统。目前尚无农业研究使用该系统,但一些研究已在教育方法论研究领域进行。
这些规格的基本部件是Jetson Nano微型计算机板和NVIDIA Jetson Nano开发工具包,后者是由NVIDIA公司开发和分发的一套打包的两轮汽车形状的实验系统套件。
上述板用于执行不同的深度学习领域,如图像数据分类、检测指示对象、自动分割计算、识别不同的声音数据,包括真实的人类语音数据,以及对上述部分的并行处理。
Jetson Nano运行在一个名为Linux4Tegra OS的特定操作系统上,程序开发环境是一个Jetpack软件开发工具包(SDK)。SDK包含了上述操作系统、通用库、API文件、开发工具、文档、演示样例、计算统一设备架构(CUDA)和机器人操作系统(ROS)。
CUDA工具包是一个开发高性能图形处理器(GPU)加速应用程序的开发环境。开发人员可以在gpu加速系统上创建和优化各种应用程序。可灵活应用于桌面工作站、企业数据中心、云平台、高性能计算(HPC)超级计算机。CUDA集包括库、调试和优化工具、编译器和用于部署应用程序的运行库。ROS是一组帮助开发人员构建基于机器人的应用程序的软件库。它包括驱动程序、最先进的算法和强大的开发工具,并且是开源的。
我们将在下面描述基于jetbot的系统组件的其他规范。一个小型的800万像素160 FOV的相机,该相机安装的分辨率为3280times;2464像素。
对于对象检测传感器,我们使用了索尼 IMX 219传感器。对于微型计算机板,我们使用了广泛使用的Jetson Nano板、交流(AC)电力资源集、HDMI电缆和跳线引脚,所有这些都是英伟达公司生产的。
对于数据存储,我们必须使用通用(非专用)Micro-SD卡;因此,我们使用了64g的卡。采用有机发光二极管(OLED: 小型监控板),显示器尺寸为0.91英寸,128times;32像素,可以显示IP地址、RAM和电池寿命。安装了两个双模无线网卡AC8265天线,速度比较快,用于连接Wi-Fi。
这种相对紧凑和简单的组合允许灵活的重新设计(例如,附加其他传感器或物联网模块)。
对于深度学习过程,我们必须改变电力消耗设置,因为这个过程有很高的消耗。因此,我们采用“20 W (5.0 V,4.0 A)模式”代替“5 W模式”,并提前将电源模式从默认设置改为“MAXN模式”。
C.基于深度学习的过程
我们在在线领域平台谷歌协作实验室上编写了系统代码。在某些部分,我们使用了基于Jupiter和Anaconda的平台(图2)。一些研究使用了开放源代码来完成各种任务(例如,任意目标跟踪和避开预先指示的障碍物,简单的对象识别)。
对于用于深度学习的神经网络,我们选择并使用“alexnet模型”文件格式。AlexNet是一个多层的神经网络;前五个是卷积层,然后是最大池化层,最后三个是连接层。
我们使用非饱和整流线性单元(ReLU)激活函数,表现出比双曲正切函数和S函数更好的训练性能。AlexNet被认为是视觉计算领域中最主要的神经网络之一,并利用CNN和GPU进行了大量的研究。
对于神经网络的定义,由于在Torchvision包中存在AlexNet模型,我们将最后一层只有两个数据输出的层更改为一个新的未训练的层。
根据相关研究的趋势,我们分30个阶段进行训练;设置batch size = 16, shuffle = True, Optimizer = SGD(随机梯度下降),Ir = 0.001, momentum = 0.9。SGD是一种用于优化具有平滑特性的目标函数的迭代方法。它可以看作是梯度下降优化的一种随机近似。它用从随机选择的数据子集计算出的估计梯度代替实际梯度。特别是在大型数据应用程序中,它可以减少计算负担,实现更快的迭代,但收敛速度略低。
我们选择并利用了sigmoid函数,这是该学术领域中常用的神经网络的激活函数。
接下来,我们将训练好的模型加载到系统上。第一阶段,我们导入了PyTorch, torchvision, OpenCV2,和numpy。然而,训练模型的格式并不完全适合安装在JetBot上的相机的格式。因此,我们执行以下预处理步骤:
(1)将蓝-绿-红(BGR)色码转换为红-绿-蓝(RGB)色码;
(2)由高度-宽度-通道(HWC)布局转换为通道高度-宽度(CHW)布局;
(3)将参数归一化为训练阶段使用的参数,
(4)将中央处理器(CPU)内存中的数据传输到GPU内存中,并且
(5)添加批量维度。
在目标检测阶段,我们使用You Only Look Once (YOLO)算法进行目标检测[22][24][25](图3和图4)。特别是,我们使用了微型YOLO版本2,它包含9个卷积(conv)层。
为了利用基于5个锚框的方法,我们输入尺寸为416times;416像素的图片。我们使用一种通用的方法来计算边界框。假设有5个锚框,预测值将输出到每一个网格上。为了识别边界框候选(提出边界框),在这种情况下有5个预测值和20类
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[258308],资料为PDF文档或Word文档,PDF文档可免费转换为Word

