英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
An Intelligent Non-Integer PID Controller-Based Deep Reinforcement Learning: Implementation and Experimental Results
Meysam Gheisarnejad and Mohammad Hassan Khooban , Senior Member, IEEE
Abstract—In this article, a noninteger proportional integral derivative (PID)-type controller based on the deep deterministic policy gradient algorithm is developed for the tracking problem of a mobile robot. This robot system is a typical case of nonholonomic plants and is exposed to the measurement noises and external disturbances. To accomplish the control methodology, two control mechanisms are established independently: a kinematic controller (which is designed based on the kinematic model of the vehicle),and a dynamic controller (which is realized according to the physical specifications of the vehicle dynamics). In particular, an optimal noninteger PID controller is initially designed as the primary dynamic controller for the tracking problem of a nonholonomic wheeled mobile robot. Then, a DDPG algorithm with the actor-critic framework is established for the supplementary dynamic controller, which is beneficial to the tracking stabilization by adapting to the uncertainties and disturbances. This strategy implements the supplementary based control to compensate for what the original controller is unable to handle. A prototype of the WMR was also adopted to investigate the applicability of the suggested controller from a real-time platform perspective. The outcomes in experimental environments are presented to affirm the effectiveness of the suggestedcontrol methodology.
Index Terms—Deep deterministic policy gradient (DDPG), dynamic controller, noninteger proportional integral derivative (PID) controller, wheeled mobile robot(WMR).
I. INTRODUCTION
TRACKING control of the wheeled mobile robots (WMRs) among the different mobile platforms [1] has been widely investigated for various tasks, even if this type of robot is an under-actuated system and has nonholonomic restrictions [2]–[5]. However, most of the research works are developed.
Manuscript received August 30, 2019; revised November 11, 2019 and December 25, 2019; accepted February 26, 2020. Date of publication March 19, 2020; date of current version December 8, 2020.(Corresponding author: Mohammad Hassan Khooban.) Meysam Gheisarnejad is with the Department of Electrical Engineering, Najafabad Branch, Islamic Azad University, Isfahan 14778-93855,Iran (e-mail: me.gheisarnejad@ gmail.com).
Mohammad Hassan Khooban is with the DIGIT, Department of Engineering, Aarhus University, 8200 Aarhus, Denmark (e-mail: khooban@ieee.org).
Color versions of one or more of the figures in this article are available online at http://ieeexplore.ieee.org.
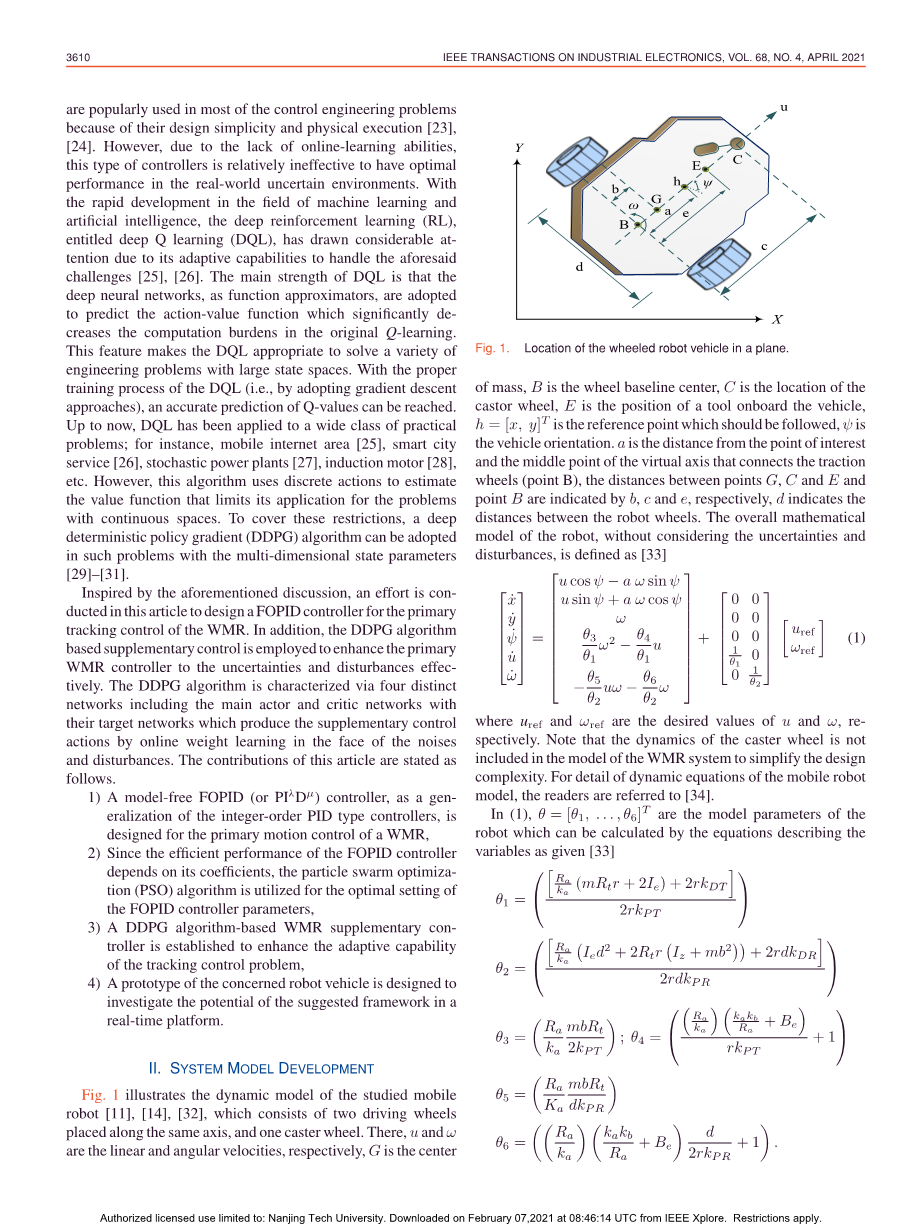
Digital Object Identifier 10.1109/TIE.2020.2979561based on theoretical perspectives and their outcomes are limited to the simulation environment. In order to achieve a high level of reliability with respect to the control requirements of the industrial robots, only a few researchers adopted their suggested control algorithms on the real-time platforms [6]–[8].
In a general sense, the issue of WMR control can be significantly simplified by using just a kinematic controller. In comparison with the dynamic controllers, the design of the kinematics controllers has less complexity since it does not need the inherent specifications of the robot and its actuators, such as electrical resistance, inertia, mass, parameters of the motors, etc. [9], [10]. However, the kinematics-based control approaches are not an ideal solution for some commonly used duties of WMRs like carrying a heavy load and moving at high speeds. In such cases, the dynamics of robot vehicles should be identified, in addition to the kinematics [5], [11]–[13]. Since the dynamic parameters of the vehicle are considered in the control design stage, it is more practical and results in more improved performance than implementing kinematics only. Up to now, various dynamic controllers have been developed in the context of the mobile robot to regulate the WMR dynamics during path tracking [1], [14], [15]. Based on the simplified dynamics of a WMR along with its kinematics, Jiang et al. [16] developed a model-based control strategy for the stabilization of a robot vehicle with input constraints, by adopting a simple implementation of normalization and passivity. Based on the concepts of the LaSallersquo;s invariance principle, a backstepping approach is formulated and implemented in [17] for unicycle modeled robot vehicle in the presence of saturation constraint. As a nonlinear scheme, the sliding mode control (SMC) is designed in [6] and [18] to ameliorate the motion tracking of an underactuated robot by offering an additional degree of freedom in control. In spite of the aforesaid studies demonstrated significant results in the WMR context, the implementation of the model-based methodologies is not feasible in some robot industrial applications due to their complexity design. To avoid
the challenges of the system dynamic identification, the modelfree techniques (e.g., intelligent control, fuzzy logic, neurofuzzy, etc. [19]–[22]) are more convenient to be practically adopted.
The conventional integer-order PID (IOPID) controllers and their noninteger generalizations (i.e., fractional order proportional integral derivative (PID), FOPID or, controllers) are popularly used in most of the control engineering problems because of their design simplicity and physical execution [23],[24]. However,
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[258274],资料为PDF文档或Word文档,PDF文档可免费转换为Word

