英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
基于单片机的超声波数字控制驱动系统
Güngör Bal amp; Erdal Bekiroglu amp; Ramazan Bayindir amp; Hasan Uzel
摘要
近年来,使用压电驱动的超声马达在响应速度和位置应用方面都受到了广泛的关注。这些电动机具有重要的特点和优点,在特殊的运动应用类型中是首选。超声波电机相对于电磁马达有不同的操作原理和不同的驱动与控制系统。在这篇论文中,针对行波超声电机,提出了一种基于单片机的数字控制驱动系统。驱动系统包括电源电路、接口电路和单片机部件。电源电路由半桥串联谐振逆变器组合而成,提供高频率的两相电压。接口电路包括栅极驱动、方向控制、光耦合器和滤波器电路。单片机部件被编程产生所需的数字控制信号,以全面控制电机。根据参考速度,单片机产生控制信号,产生适当的驱动频率。因此,实际的电机转速准确地跟踪参考速度。速度反馈由光编码器接收,并以数字速度和位置信号传输给控制器。已开发的驱动系统已通过实验测试。所得结果表明了该系统的有效性和可靠性。基于单片机的驱动系统可以轻松并成功地应用到超声电机。
关键词 超声波驱动; PIC单片型微型计算机; 速度控制; 反相器
1、介绍
新研制的压电驱动超声电机(USMs)具有许多重要的物理特性和运行性能,如低速大扭矩、大扭矩/体积比、快速准确的速度/位置响应、无电源或附加制动扭矩、良好的启动/停止动力学、简单机械设计、紧凑尺寸、无电磁噪声等。
近年来,USMs作为工业、医疗、消费者、机器人、空间和汽车应用领域的服务应用的直接驱动式致动器,已经吸引了人们特别的关注。新开发的USMs的性能、控制技术和工作原理与常用的传统电磁电机有着根本性不同。[1-3]
压电超声电机的工作原理是基于两阶段的机电能量转换。首先,电能转化为机械能。这是由压电致动器实现的,它激发振动部件的高频机械振动。在第二步中,振荡被转换成连续的线性或旋转运动的摩擦力产生于振动部件的接触界面和另一具被压在振荡器上的物体。通常振动部分为定子,第二部分为转子。[4]
已经有几种速度和位置控制技术被提出,用来驱动USMs或控制它的速度和位置。数字信号处理器[5-7],计算机和微型计算机[8-10]或特殊的微控制器/微处理器已经被用来实现驱动和控制。利用现场可编程门阵列(FPGA)设计和实现了一种USM伺服驱动器。利用USM的等效电路设计了驱动电路。还建立了驱动系统的实验动力学模型[11]。基于PC机的驱动电路和控制系统已经为USM开发了一个比例积分微分和滑模控制应用于控制回路[12]。提出了一种利用压电变压器代替直流/交流变换器驱动超声波电机的方法[13]。模拟电子阶段是为USM开发的。开环的行为是测量和详细的。然后用微控制器对闭环和伺服控制进行实验、测量和调整[14]。
在本文的研究中,利用低成本的8位PIC单片机设计并实现了行波超声电机的速度控制应用。本研究的目的是获得简单、可靠、成本效益、数字控制、用户友好、紧凑、适应性强、准确的新型控制系统。为了这一目标设计了USM动力驱动系统。然后设计了控制功率驱动的接口电路。为了实现速度控制,PIC16F877微控制器被编程并集成到USM驱动系统中。最终已经建立了一个实验测试装置。提出的速度控制方案已进行了各种试验。得到的结果已经系统地证明了PIC控制的USM驱动系统的有效性和可靠性。
2、行波超声波电机
超声波电机是一种特殊类型的电机,由压电陶瓷在定子中的机械振动驱动。虽然设计了几种USM类型,但旋转型(TWUSM)是最常用的USM类型。为了在定子内产生行波,必须控制两种机械正交模态。电极的A模式的角度为cosktheta;,B模式为 sinktheta;。通过推动两个模式以90度异相产生一个行波。每一种模式都单独提供驻波。这些驻波的叠加产生了一个在TWUSMs中使用的行波[4,15]。定子表面上点的椭圆运动是由定子中的行波产生的。压电陶瓷层与定子的下表面成键,使振动受到激发。转子被压在定子上,通过一个圆盘弹簧,由接触层的摩擦力驱动。转子的旋转方向与行波的方向相反。TWUSM的速度是通过以下几条控制:
- 两相电压的频率
- 两相电压的幅度
- 两相电压的相角
文献[16-20]提出了许多使用这些控制方法的研究方案。在本研究中,采用频率控制方法控制了USM的速度。为了实现这一目标,PWM信号由PIC单片机生成,然后应用于电子接口电路。下文将详细介绍了该系统的单片机部分,以及USM的驱动和控制系统。
3、PIC16F877 型单片机
微控制器是嵌入式数字控制设备,它有一个中央处理器,中断,计数器,定时器,I/O端口,RAM, ROM/EPROM被用于系统的控制。PICs(外围接口单片机)是基于CMOS技术的集成电路。PIC的主要组件是RAM、EPROM、EEPROM和外围接口适配器(PIA)。这些组件被插入到相同的集成电路中,以减小系统的尺寸,降低系统的成本,使系统的设计更加容易。地址总线、数据总线和连接组件的控制总线由制造商放置在PIC电路中。由于这些优点,在实际的控制应用中,PICs已经成为首选的装置。在这项工作中使用的PIC16F877在20mhz的时钟频率上运行,每条指令的运行速度为200 ns。Flash程序内存是8 ktimes;14字节。数据存储器被划分为四个存储矩阵,其包含通用寄存器和特殊功能寄存器。RP1和RP0是存储矩阵选择的位元。每个存储矩阵扩展到7个Flash(128个字节)。它包含1 KB EEPROM作为程序内存,15个特殊硬件寄存器,36个通用寄存器和64字节EEPROM作为数据存储器。由于其成本低、能耗低、设计体积小[21,22],所以大部分的PIC都是首选的控制设备。
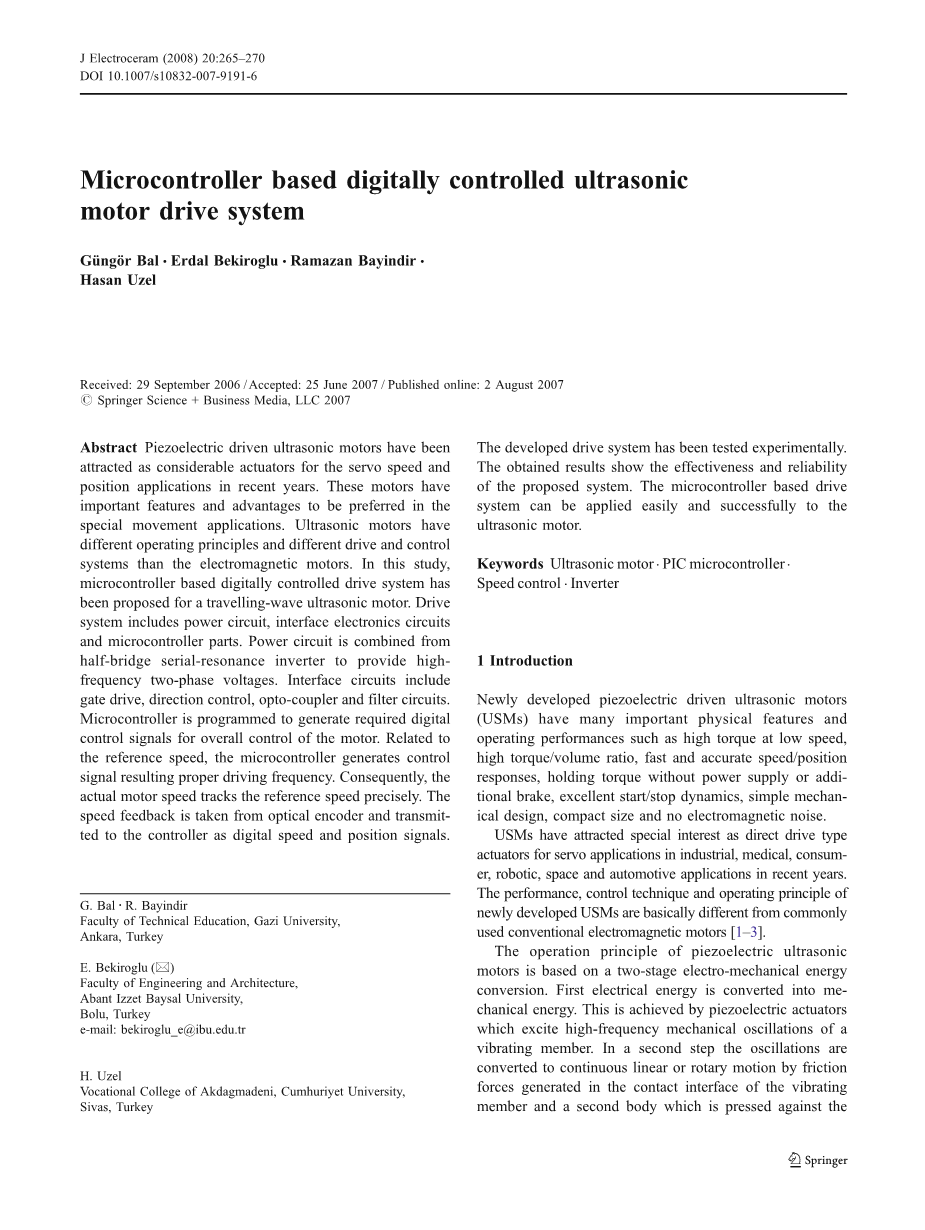
在研究中,PIC16F877型单片机已被用于USM的速度控制应用。开发系统框图如图1所示。USM控制系统主要包括键盘、微控制器、驱动系统、USM和LCD显示部件。引用命令是从键盘输入的。通过数字编码器测量电机的实际转速和方向,并将其送入微控制器。微控制器处理速度值,并与从键盘输入的参考速度进行比较。根据这种比较,产生了速度误差。将比例控制算法应用到微控制器中,实现了控制。在单片机中开发的软件可以作为单片机控制的比例增益来生成所需的PWM信号。然后将产生的PWM信号应用到驱动系统中。根据参考指令,驱动系统产生所需的两相电压和合适的驱动频率。USM以参考速度旋转,该速度在LCD上被监控,以显示系统的可靠性和准确性。反馈电压(Vs)与电机转速成正比,被感知并应用于驱动系统作为第二个控制回路。对反馈电压和参考电压进行比较,以获得所需的驱动频率值。根据参考速度和方向指令,将应用电压调整为USM驱动系统。
对反馈电压和参考电压进行比较,以获得所需的驱动频率值。根据参考速度和方向指令,对应用电压以USM的驱动系统进行了调整。
4、USM的驱动与控制系统
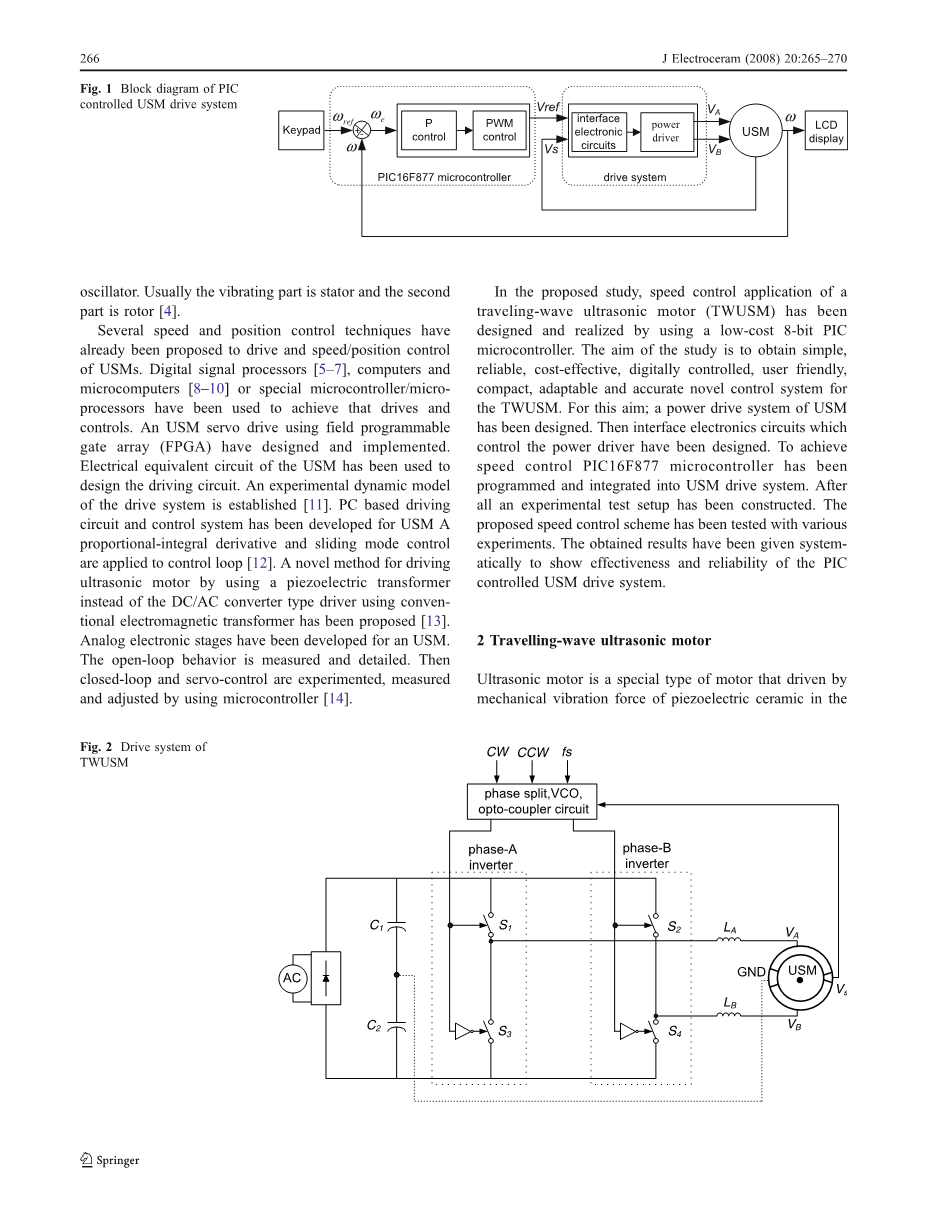
在目前的研究中,Shinsei的USR60移动波型USM已经被使用。设计了该电动机两相高频逆变器。电机的每个相电压都有两个电源开关。将电源开关设计为半桥式,以获得两相电压的确定相角。图2为USM的两相半桥逆变器的主电路。该逆变器包括脉冲宽度调制(PWM)和脉冲调频(PFM)控制技术的有效功能。基于压电陶瓷在定子中使用的特性,将USM的机械振动系统表征为电容性负载。两种电感LA和LB分别与USM的每个相连接,以补偿USM的阻尼电容。在USM中,Vs是USM的反馈电压。这种逆变器产生两相高频电压。两相电压的幅值、频率和相位差可以通过控制来改变。CW和CCW的输入提供了方向控制信号,让VA或VB引导。
为了提供正弦输出电压,S1的输入信号被倒转并应用于S3,而S2的输入信号被倒置并应用于S4。这部分的上、下开关是互补的,如S1和S3。然而,S1的信号由非门倒置,然后应用到S3上。切换技术提供的开关之间的死带。此外,为了避免短路操作,快速恢复型自由旋转二极管并联。两相输出电压90°相位差得到关于这个切换技术。
控制输入的驱动系统是开关频率,fs。从反馈电极电压(Vs)和参考直流电压比较中得到的控制输入。根据要求的速度,调整开关频率的值。这是通过改变参考直流电压值来实现的。为了改变参考直流电压的值,改变了PWM信号的工作周期。因此,根据PWM信号的占空比,控制低通(LP)滤波器的直流输出。设计的滤波电路如图3所示。从图中可以看出,滤波器的输入是可控的PWM信号。根据该信号的占空比,滤波器产生参考直流电压。当PWM信号的占空比增加时,滤波器的直流输出值增加[16]。
近年来已报道了几种速度和位置控制技术。一般来说,计算机、数字信号处理器或先进的微机/微处理器设备已经被用来实现这些控制。在本研究中,USM驱动系统由PIC16F877单片机控制。该控制系统新颖、新颖。在开发系统方面,开发了非常简单可靠的控制系统。基于PIC单片机的USM控制方案非常简单,成本低,重量轻,可靠性高,实用性强。通过提出的方法,可以用非常简单的控制技术来驱动和控制USM。
图4给出了PIC控制的USM驱动系统框图。PWM信号、CW和CCW方向信号由PIC单片机的GPIO端口产生。微控制器的数字输入引脚已用于编码器信号。编码器是500-ppr,有两个正交编码器信号和一个指标信号。实际和参考速度显示在液晶显示器上。驱动和控制系统所需的总功率,提供一个直流电源。
5、实验结果
本节给出了基于PIC单片机的数字控制USM驱动系统的实验结果。给出了两相输出电压和速度图形,给出了两种不同的PWM信号的工作周期,表明了功率比和电机转速之间的关系。
图5给出了PWM信号和电机转速。以这种方式,参考速度是42 rpm。实际速度是在液晶屏上测量和演示的。USM以42 rpm作为参考速度旋转。图6显示了这个速度的输出两相电压。从图中可以看出,相电压分别为124 V和121 V。相电压的周期是23.6mu;s结果42.37千赫驱动频率。
参考速度为90 rpm,以演示系统的可靠性。图7显示的是PWM信号和电机转速,实际速度为90 rpm,并在LCD上表示。图8显示了这个速度的输出两相电压。逆变器的输出电压分别为115 V和109 V。相电压的周期是24mu;s 41.66千赫驱动频率。从结果中可以清楚地看出,电机的驱动频率降低以提供电机转速的增加。
图9显示了在LCD上以42 rpm和90 rpm参考速度测量的参考和实际速度。从图中可以看出,测量的实际速度等于参考速度。驱动系统已经测试了不同的速度值。图10显示了不同度量的引用和实际速度之间的兼容性。从图中可以看出,实际速度是参照基准速度,特别是在USM控制区域,可以描述为30转/ 130 rpm转速范围。
6、总结
本文设计并实现了基于PIC单片机的TWUSM数字控制系统。设计了驱动USM高频电压反馈的串行谐振逆变器。USM的速度由驱动频率控制。驱动频率的值由微控制器的PWM输出控制。通过改变PWM信号的工作周期,改变了驱动频率。因此,我们控制了USM的速度。
通过实验验证了所提出的驱动控制系统的性能。测量了相电压、PWM占比和电机转速。给出并讨论了两种测量结果。参考和实际速度显示在LCD显示参考和实际速度是相等的。开发的控制方案也经过了不同的操作条件的测试。开发的驱动控制系统已应用于USM的调速回路。实验结果表明,所提出的驱动和控制系统为USM提供了准确、快速的速度特性。基于PIC单片机的USM控制方案数字控制方法简单、经济、可靠,便于实际应用。
参考文献
1. T. Sashida, T. Kenjo, An Introduction to Ultrasonic Motors (Oxford University Press, New York, 1993)
2. G. Bal, E. Bekiroğlu, Sens. Actuators, A 109, 212–219 (2004) 3. A. Ferreira, P. Minotti, Control Eng. Pract. 6, 1–13 (1998)
4. H. Storck, J. Wallaschek, Int. J. Non-linear Mech. 38, 143–159
(2003)
5. F.J. Lin, R.Y. Duan, J.C. Yu, IEEE Trans. Power Electron. 14(1),
31–42 (1999)
6. G. Bal, E. Bekiroğlu, IEEE Trans. Power Electron. 20(5), 1143–1149
(2005)
7. S.W. Chung, K.T. Chau, Electr. Power Compon. Syst. 29, 707–722
(2001)
8. Y. Izuno, T. Izumi, H. Yasutsune, E. Hiraki, M. Nakaoka, IEEE
Trans. Ind. Appl. 34(1), 126–132 (1998)
9. T. Yoshida, T. Senjyu, M. Nakamura, N. Urasaki, H. Sekine, T.
Funabashi, Electr. Power Compon. Syst. 34(11), 1253–1266
(2006)
10. T. Senjyu, S. Yokoda, K. Uezato, Electr. Power Compon. Syst. 29,
179–189 (2001)
11. J.S. Chen, I.D. Lin, Mechatronics 12, 511–524 (2002)<!--
全文共7634字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15851],资料为PDF文档或Word文档,PDF文档可免费转换为Word

