英语原文共 16 页,剩余内容已隐藏,支付完成后下载完整资料
期刊:
机器人与自治系统
题目:
一种新颖的基于神经网络的气动人工肌肉驱动机器人网络自适应SCARA并联前馈PID控制器和改进的差分进化算法
摘要:
本文提出了一种结合自适应前馈神经控制器和PID的新型控制系统控制器来控制SCARA并联机器人使用气动人造机器人的关节角度位置肌肉(PAM)执行器。首先,所提出的逆神经NARX(INN)模型动态地识别所有非线性特征的SCARA并联PAM机器人。逆神经NARX模型的参数为用修正的差分进化(MDE)算法进行优化。其次,结合逆向神经NARX模型提供了一个从所需关节位置和前馈控制值传统的PID控制器应用于提高精度和抑制稳态误差联合位置控制。最后,基于Sugeno的新型自适应反向传播(aBP)算法模糊系统,提出在线更新逆神经NARX模型的权值很好地适应其运行中的干扰和动态变化。实验测试证实所提出的控制方案与传统控制相比的性能和优点方法。
介绍:
气动人造肌肉(PAM)执行器现已广泛应用用于医疗机器人,人形机器人等工业应用。气动人造肌肉首先在20世纪50年代开发用于假肢。 PAM是由压力操作的设备,供应气动气囊的空气。 PAM执行器有提供高功率/重量等优点的能力,卫生,易于维护,特别是能够人体依从性,这是医学和医学界人类福利领域最需要的。 因此,基于PAM的设备被认为是作为电动执行器的有希望的替代品。
目前,有关PAM制动器精确控制的各种研究。一些研究基于数学模型设计了控制器,线性参数PAM模型由实验输入输出数据。作者在开发了使用PAM执行器的非线性模型来获得鲁棒控制的滑膜控制器。所有这些方法都基于PAM动态系统建模。因此,使用这些方法很难精确控制PAM执行器,因为它具有强大的非线性特性,并且取决于工作条件(如温度或压力敏感)。为了克服这个缺点,基于神经网络工程的控制器是一个正在进行的研究。如基于数据网络的控制器。一个先进的PID控制器,参数由神经网络调整。混合神经模糊控制器和混合神经网络和遗传算法,用于实现PAM执行器的稳定高性能控制。
我们知道,神经网络的性能取决于训练过程。在训练过程中,训练算法是通过最小化被定义为神经网络方案的最优加权值。一种流行的训练算法是反向传播BP。尽管如此,BP算法仅在初始值周围实现局部搜索并产生局部最优值。在这样的考虑下,基于优化算法的培训过程被认为是潜在的选择。由于它们寻求全局解空间而不陷入局部最优的潜力,EA产生了全局最优。例如,leung等人介绍了基于神经集的参数修改。Das等人引入了用于训练神经网络模型的粒子群优化PSO。Socha等人使用蚁群优化来训练用于模式分类的前馈神经网络。Valian等人提出来改进的布谷鸟搜索算法用于训练前馈神经网络的两个基准分类问题。虽然这些提出的方法取得了良好的效果,但仍需要继续面临两个挑战,即改进神经网络的训练,以便如何找到最优解以及如何实现更快的收敛速度。
在进化方法中,差分进化DE算法被认为是一种有前景的全局随机优化示范法。第一个DE技术论文实在1995年由Stone R.和Price KV提出的。其优点如下:安装简单,性能更好,涉及的参数更少,复杂度更低。近年来,DE技术是通过最优化最小化和受限加权值来训练神经模型。例如Ilonen等人成功地提出了一个基于DE的训练神经训练中。Subudhi等人介绍了DE算法在非线性植物识别的神经训练中。Su等人采用DE技术对小齿轮故障诊断的微振动机理进行小波神经模型训练。这些结果表明DE技术可以有效地应用于学习不同应用中使用的神经模型。尽管如此,与所有其他的演化算法一样,DE也遇到了一些缺陷,如下:DE在全场范围内寻找获得全局最优值的能力,但在围绕潜在解决方案进行探索时似乎很慢。DE对于大规模优化任务呈现出缓慢的收敛速度。此外,DE常常会遇到停滞的情况,其中最优搜索过程在获得全局最优值之前停滞。
针对这些缺点,提出了一些改进训练神经网络DE性能的建议,例如,Slowik等人成功实现了具有多个试验向量的自适应DE算法用于训练人工神经网络。Curteanu等人提出了一种新的神经进化方法,其应用了DE的变体,其使用基于反对的学习初始化。坐着在提出了DE算法的全局搜索与另一种局部搜索方法如BP,LM的组合,用于构建神经网络模型的近似值。总之,为了改善基于神经网络模型的控制的质量控制,需要考虑两个问题:如何获得准确的近似值以及如何在线更新神经控制器的权重。本文提出了一种具有自适应前馈控制器和控制器的新型控制系统
PID控制器(称为新型自适应前馈—PID控制器)用于SCARA并联PAM机器人的位置跟踪控制。这种新的控制方法的想法如下,
1.主动引入用于训练多层感知器神经网络模型的改进的修正差异进化(MDE)算法来。 首先,突变阶段的差异进化是通过组合来修改的两个突变策略rand / 1和best / 1一起创建试验载体而不是仅使用一个突变作为标准DE的运营商或rand / 1或best / 1。 修改旨在平衡全球探索而且当地的开采能力会发现全球潜力最佳解决方案。 然后是反向传播的局部搜索能力算法被应用于收敛到最优解。
2.提出反向神经NARX(Nonlinear AutoRegressive带有由MDE优化的外生输入)模型训练算法 - 称为MDE-INN模型,来识别SCARA并行的非线性动态特性PAM机器人。
3.结合基于MDE-INN的前馈控制器模型和传统的PID控制器。 凡MDEINN模型提供基于的前馈控制值联合参考位置和PID反馈控制器是提高精度和拒绝稳态误差用于联合位置控制。
4.提出新的自适应反向传播(aBP)学习算法,使用模糊逻辑在线更新权重MDE-INN模型的值,来很好地适应非线性SCARA的干扰,并在其操作中动态变化并行PAM机器人。
本文的其余部分组织如下:部分2介绍了SCARA并行PAM机器人的配置。部分3提出了改进的差分进化MDE算法训练的非线性系统辨识神经网络NARS模型。部分4使用神经NARS模型和MDE训练算法来识别SCARA并联PAM机器人的逆模型。部分5介绍了用于SCARA并联PAM机器人的自适应前馈PID控制器。最后,部分6包含一些结论。
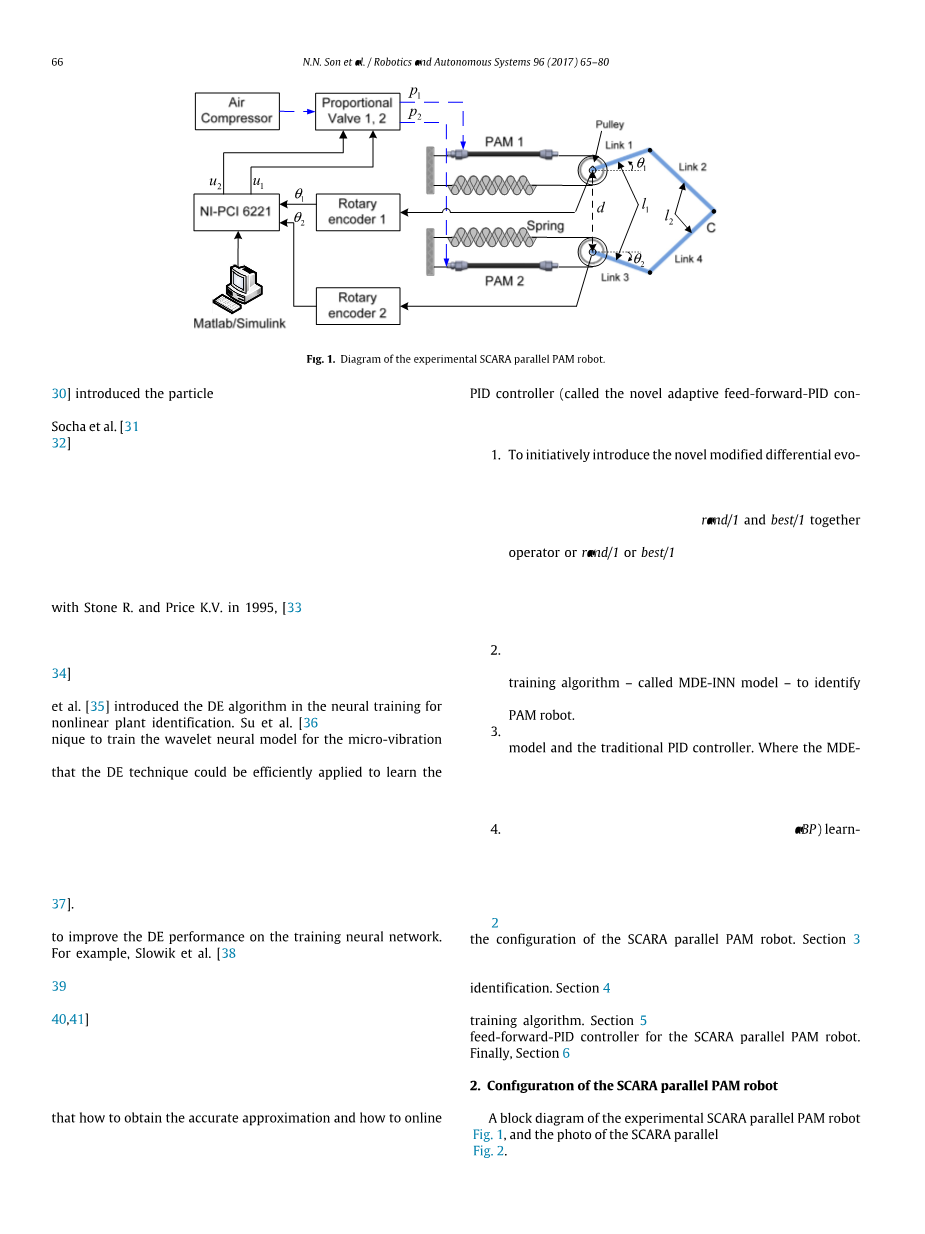
- 实验SCARA并行PAM机器人的框图架构如图1所示。
图1 SCARA机器人原理图
并且SCARA并联PAM机器人系统的照片如图2所示。
图2 SCARA机器人照片
SCARA并联PAM机器人是一种四杆机构,由两个气动人造肌肉(PAM)执行器构成,两个螺旋弹簧,两个旋转编码器,两个EV2500-008成比例阀门,NI PCI 6221卡,空气压缩机和电脑。SCARA并联PAM机器人的机械参数为如表1所示和SCARA并联的设备参数表2中描述了PAM机器人的关节角度旋转并行PAM机器人通过连接一个PAM来创建带有螺旋弹簧和比例阀。 两个旋转编码器直接安装在两个关节上以测量关节角度并联PAM机器人的位置。 PCI 6221卡用于数据采集和控制机器人系统。 所有的控制算法在Windows的实时Windows目标工具箱中实现Matlab和采样时间选为Ts = 0.01s。
3提出的神经NARX模型结构
所提出的神经NARX模型通过结合多层感知器神经网络(MLPNN)模型来实现
具有非线性自回归结构。用修正的差分进化训练算法对神经NARX模型的加权值进行最优选择。由于这种组合结构,新型神经NARX模型获得了MLPNN模型的有前途的近似特征和NARX模型的强大预测能力。用于非线性系统辨识的神经NARX模型结构如图3所示。
图3 用于非线性系统辨识的神经NARX模型
其中,神经NARX模型是完全连接的三层神经网络;u(k)表示非线性系统的输入信号;y(k)表示非线性系统的输出信号;和分别是输出y(k)和输入u(k)的阶数:q是后向时移算符,定义U(k)=U(k-1);Vji表示输入层的权值,Vjo表示偏置输入层的权重Wij和Wio分别表示隐层和偏置隐层的权值。fj(.) 和F (.)分别表示隐层的S形函数和输出层的线性激活函数。维数D是神经NARX模型的权重和阈值的总和。
最优化的目的是通过最优地选择适应度函数En
3.2传统的DE算法
R. Storn和K.V. 价格首先介绍了差异演化(DE)技术,[33]。 如今,它很受欢迎并发挥着优化算法的重要作用。 DE算法包括以下五个主要阶段初始化。假定它需要优化一个包含的函数D实参。 首先,选择人口规模NP。然后DE技术从产生NP N维的par hazard开始向量。 每个向量被视为一个个体,这被定义为 = [ x1,i,G, x2,i,G, . . . , xD,i,G ],G代表几代,G = 0,1,.....,Gmax,i =1,2,.....,NP。每个参数向量被限制在一个有界的寻求空间,
他们不能超越这些界限的任何一端。 较低和上限表示为X⃗min={x1,min,x2,min,...。。。 ,xD,min}和X最大={x1,max,x2,max,...。。。 ,xD,max}。 因此,第j个组件第i个矢量最初开始为xj,i = xj,min randj,i [0,1](xj,max-xj,min),0le;randj,i [0,1]le;1。
突变。在DE方法中,亲本载体也被认为是目的载体,然后通过差异变异程序出现的变异载体被命名为供体载体,并且通过重组供体和目的载体构建的后代载体被认为是试验向量。为了产生每个第i个目的的载体的供体载体,通常使用一些流行的变异操作。
3.3.1适应性突变阶段
元启发式方法的成功是通过平衡两个相互矛盾的方法来显着确定的;全球探索和本地开发。通常情况下,具有良好全局探索能力的元启发式算法通常更糟糕,在DE中,进行变异操作在其求取能力和收敛速度上起着举足轻重的作用。目前已有至少四种突变程序被引入为不同目的的DE。例如,与突变程序rand / 1,DE在全球调查中表现强劲本地寻求薄弱。然后,它收敛到全局最优结果。否则,用突变过程最好/ 1,DE是在当地寻求优秀,但全球发现不佳。因此,它是容易陷入局部最优结果。对于这些原因,仅通过应用标准DE的性能用于NN训练的一个变异操作仍然很低。基于以上分析,在这项工作中,DE的变异阶段是通过组合两种突变策略rand / 1来修饰和最好的/ 1一起创建试验载体而不是仅使用一个变异操作符rand / 1或best / 1作为标准DE。该修改旨在平衡全球勘探与本地之间的关系开发能力。新的突变方案被描述为如下:
if rand[0, 1] gt; 0.3
vi = xr1 F ( xr2 minus; xr3 ) % use “rand/1”
else
vi = xbest F ( xr1 minus; xr2 ) % use “best/1”
End
从上面的机制,可以认识到,每一个目标矢量,只应用两个变异算子中的一个用于创建当前试验向量,取决于统一分布在[0,1]范围内的随机值。 对于每个目标向量,如果随机值大于0.3,则执行rand / 1。否则,最好/ 1是。 因此,用这个方案,在任何特定的一代,拟议的战略有机会增强勘探开发能力。 这很重要,要注意的是由于训练神经是一个复杂的非线性问题;它比开采能力更需要探索。在这项研究中,我们认识到rand / 1和best / 1的比率为0.7 / 0.3对勘探和开采来说是一个非常均衡的价值能力。
3.3.2与后向传播算法混合使用
在过去几十年中,反向传播(BP)算法被称为训练ANN [44]的流行方法。尽管如此,因为BP是基于梯度的优化方法,它只是当它的搜索过程从一个良好的初始点开始时是好的。许多研究人员已经认识到全球性的结合搜索方法,如GA,PSO,DE与本地搜索方法BP,Levenberg Marquardt(LM)等是一种有效的方法建立人工神经网络的近似模型。对于DE,有一些研究将其与基于梯度的方法进行了杂交在[40,41]中。遵循这种趋势,本文提出了一种新方法将BP集成到DE算法中。其中,BP通过搜索过程在选择阶段之后应用的DE,并且它只使用最好的个人作为初始点用于搜索。这种技术不会浪费太多时间,但它可能帮助提升每一代的本地解决方案并具有很高的水平完成搜索过程后获得一个好的解决方案的概率。
3.3.3控制参数设置
DE中的控制参数显着地为C,F和NP影响算法的有效性和性能。R. Storn和Price [45]建议F应为0.5一个不错的选择,C应该设置为0.1或0.9,NP应该是在5D和10D之间。 Gauml;mperle等人。 [46]提出NP应该在3D和8D之间,C应该是[0.3,0.9]和F = 0.6。Ronkkonen等人 [47]提出了更好的选择F = 0.9和对于不可分的多模态适应度函数,C应该设置在0.9和1之间,对于可分离的多峰值,C应该在0和0.2之间目标函数。
一些研究人员最近提出了新的调整方法控制参数在自适应或自适应。例如,刘
等人。 [48]引入了模糊逻辑来修改交叉和突变率。布雷斯特等。 [49]通过自适应提出了jDE算法控制将变量编码为个体和变量的变量通过DE更新它们。秦等人。 [43]介绍了一种自适应DE(SaDE)技术,其中既有试制策略并通过基于它们的训练来自适应控制参数以前的经验在生产好的解决方案基于上述分析,我们发现很难充分选择DE算法的所有参数。在这个提议中MDE算法,突变体F和交叉C不能像在中那样修复标准DE,它们是在范围内随机生成的[0.4,1]和[0.7,1]。这些参数被引用从[50]改进了许多MDE-BP的可搜索性不同的搜索方向。 NP参数没有改变在运行算法期间。
3.3.4MDE训练算法的流程图
本部分使用MDE算法通过
全文共9195字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[14084],资料为PDF文档或Word文档,PDF文档可免费转换为Word

