英语原文共 24 页,剩余内容已隐藏,支付完成后下载完整资料
智能手机的选定室内定位方法调查
Pavel Davidson and Robert Picheacute;
摘要
本文概述了当代智能手机上最重要的室内定位方法。这些方法包括基于Wi-Fi和蓝牙的定位、磁场指纹识别、基于建筑平面图绘制辅助导航地图以及自成一体的传感器辅助导航。本次调查中研究的基于Wi-Fi和蓝牙的定位法是指纹方法,它们使用先前在已知位置收集的无线电信号强度测量数据来确定用户的位置。磁场指纹识别可用于信息融合算法,以改进定位。地图匹配算法的应用包括墙体约束、拓扑室内地图和构建几何形状以进行标题校正。最后,讨论了多层建筑环境下的步长、步数计算和方向估计、方向跟踪、运动分类、过渡模式检测和楼层变化检测的方法。
索引术语—室内定位、WLAN、BLE、磁力计、指纹识别、地图匹配、IMU。
I.引言
因为每部智能手机都配备了全球导航卫星系统(Global Navigation Satellite System,GNSS)或辅助GNSS接收器,服务于智能手机的街道导航无处不在。然而,没有一项技术可以提供可靠的室内定位。适用于智能手机上可实现的室内定位技术包括:
bull; 使用无线电频率(Radio Frequency,RF)信号,无论是已经存在的信号(如无线局域网(Wireless Local Area Network,WLAN)或蜂窝信号,还是由新的专用基础设施(射频识别(Radio Frequency Identification,RFID)/近场通信(Near Field Communication,NFC)、蓝牙)生成的信号定位。
bull; 自成一体的传感器:三轴加速度计、三轴陀螺仪、三轴磁力计、气压计
bull; 室内地图(建筑平面图)
bull; 磁场指纹识别
这些技术均不能完全满足大众市场设备的所有室内定位需求,其优缺点取决于每种技术的性质。例如,基于超宽带(Ultra Wide Band,UWB)和RFID的解决方案需要部署新的基础设施,并在智能手机中添加新的硬件组件。这些额外设备目前受限于蓝牙低能耗(Bluetooth Low Energy,BLE)解决方案的使用。
使用智能手机进行室内导航的典型工作包括在大学、商场和机场等公共建筑或在体育赛事、会议等活动中定位人员和地点,跟踪儿童和老年人,并自动标记帖子和图片。为了满足这些要求,特定办公楼的定位精度必须达到精确定位到每个房间的等级,并且整层必须正确识别。在大型开放空间(如机场和购物中心)中,几米的精度足以建立视觉联系并找到所需位置,例如机场登机口。对于一些应用程序,如商店导航或博物馆的导游系统,更好的定位精度是必需的。当信标密集地放置在所需区域时,可以通过基于BLE的定位来实现。
目前,大多数智能手机都使用基于WLAN的室内定位,通常可以满足WLAN路由器丰富地区的定位精度要求。但是,准确性在很大程度上取决于WLAN路由器的密度和无线电地图的质量,这些地图的精度通常会随着时间的推移而下降,所以必须定期更新。使用额外的传感器和信息源可以改进基于WLAN/BLE的定位,例如一体化传感器可以提高WLAN位置更新之间的准确性和可靠性,以及WLAN/BLE覆盖范围间隙。其他常用的改进方法是地图匹配和磁场指纹识别。它们可以与WLAN/BLE和传感器融合,提高位置精度。基于磁场的定位在概念上与军用飞机和潜艇的地形导航系统相似,通过其高度或深度与地图相匹配,估计位置;在磁性室内定位中的特点是主要是由建筑结构中的钢结构引起的磁场局部失真。
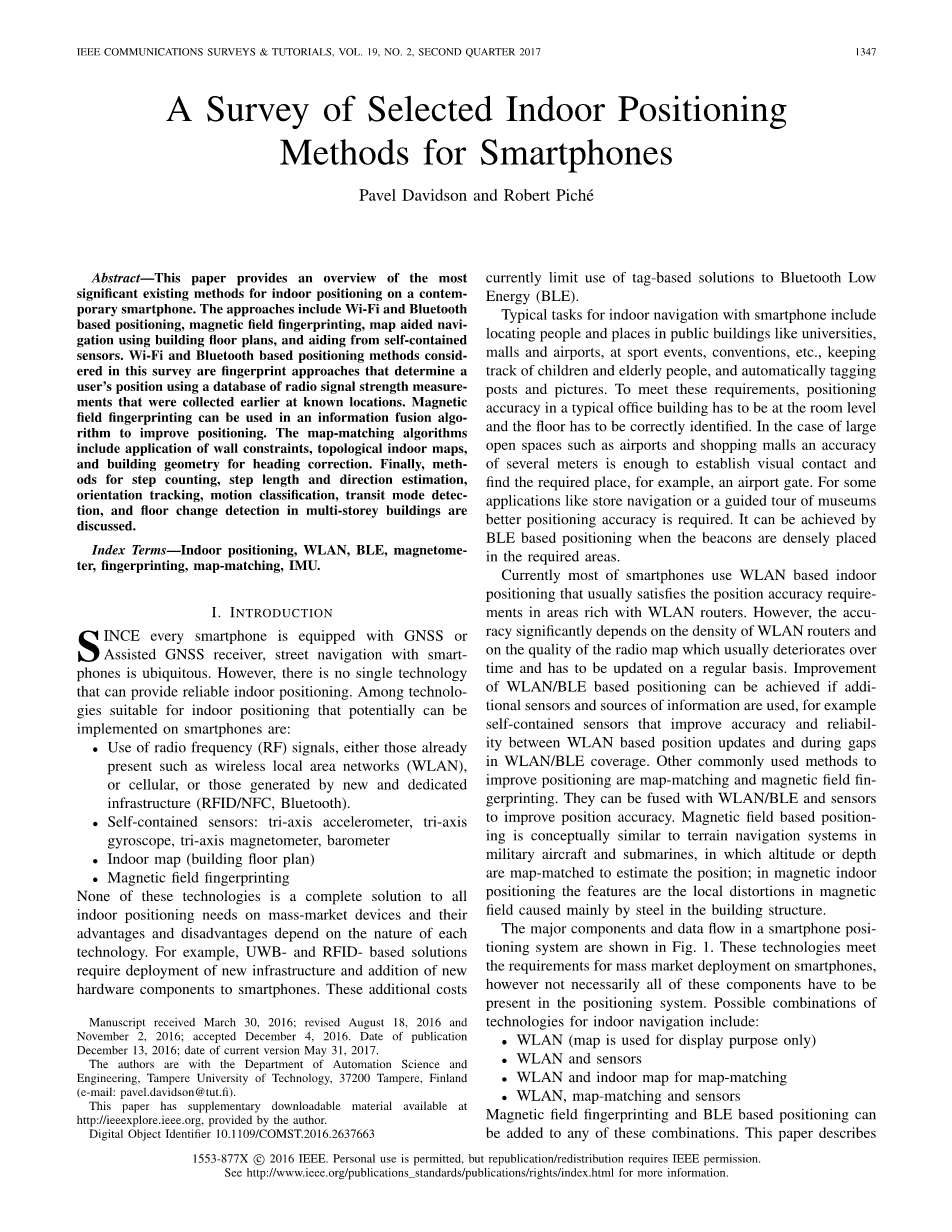
智能手机定位系统中的主要组件和数据流以图1显示。这些技术满足了智能手机大规模市场部署的要求,但并非所有组件都必须存在于定位系统中。室内导航技术的可能组合包括:
bull; WLAN(仅用于显示目的地的地图)
bull; WLAN和传感器
bull; 用于地图匹配的 WLAN 和室内地图
bull; WLAN、地图匹配和传感器
磁场指纹识别和基于BLE的定位可以添加到其中任何一个组合中。本文描述了这些技术组件的技术和位置估计方法。
论文组织如下。第二节讨论基于WLAN和BLE的定位系统。磁场指纹在第三节中解释。适合在室内环境中实施的地图匹配方法在第四节中介绍。第五节调查智能手机传感器的使用,以改善定位以及弥合WLAN和蓝牙覆盖之间的差距。最后,第六节和第七节总结了这项使用智能手机进行室内定位的方法的调查,并为今后在这一领域的研究提供了建议。
图1. 智能手机室内定位系统的主要组件
II.基于WLAN和BLE定位
WLAN的接入点(Access Points,AP)广播信标帧,包括AP的媒体访问控制(Media access control,MAC)地址,通常每100毫秒宣布其在特定区域的存在[1]。移动节点接收这些信号,并可以根据其MAC地址识别AP。虽然WLAN不是为定位而设计的,但它可用于利用接收到的信号强度(Received Signal Strength,RSS)测量来估计用户位置。这项技术对定位非常有吸引力,因为WLAN APs在大多数建筑中都随处可见,而且每部智能手机都具有WLAN连接功能。但是,WLAN定位需要生成和维护无线电地图,这是一项耗时且耗费大量劳动力的任务。使用众包绘制无线电地图是很困难的,因为参考数据的位置通常不在室内,因此无法在用户设备的后台进行定位数据的收集。基于WLAN定位的智能手机实施通常基于RSS方法。由于测量的RSS数据非常嘈杂,只有包含训练数据集采集阶段初步状态的两段式方法才能提供所需的定位精度。
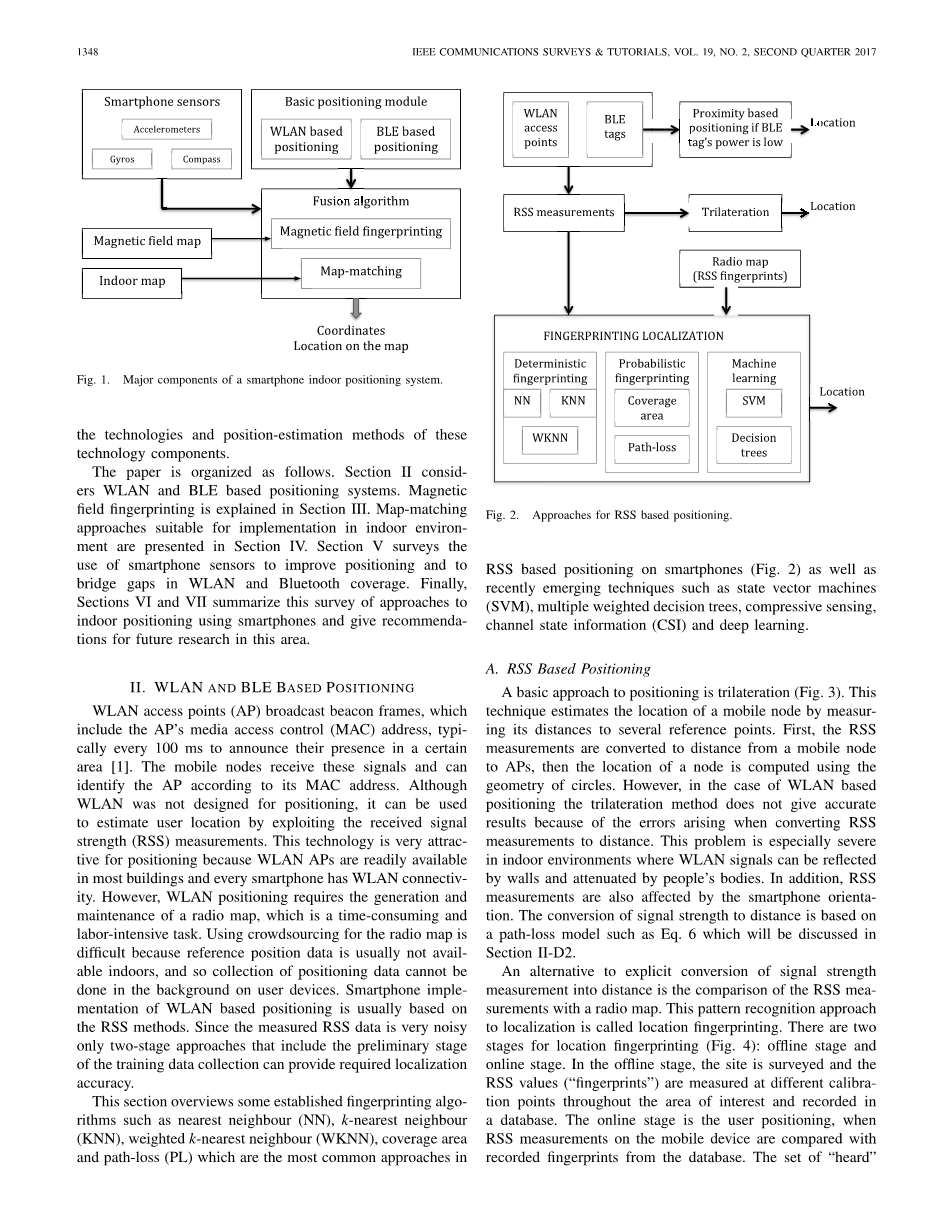
本节概述了一些已建立的指纹算法,如nearest neighbour(NN),k-nearest neighbour(KNN),weighted k-nearest neighbour(WKNN),coverage area和path-loss(PL),这是图2中最常见的方法。基于RSS的定位方法。基于智能手机的RSS定位(图2)以及最近出现的技术,状态矢量机(State Vector Machines,SVM)、多重加权决策树、压缩传感、通道状态信息(Channel State Information,CSI)和深度学习。
图2. 基于RSS的定位方法
- 基于RSS定位
一种基本定位方法是三边形(图3)。该技术通过测量移动节点与多个参考点的距离来估计其位置。首先,将RSS测量转换为从移动节点到AP的距离,然后使用圆的几何原理计算节点的位置。但是,在基于WLAN的定位中,由于将RSS测量结果转换为距离时出现的错误,三边法测量不能给出准确的结果。这个问题在室内环境中尤为严重,WLAN信号可以通过墙壁反射,并被人体衰减。此外,RSS测量也受到智能手机方向的影响。信号强度转换为距离基于路径损失模型,如Eq. 6,该模型将在第二节D2中讨论。
将信号强度测量结果明确转换为距离的替代方案是将RSS测量结果与无线电地图进行比较。这种识别定位方法称为位置指纹识别。位置指纹识别有两个阶段(图4):离线阶段和在线阶段。在离线阶段,对站点进行调查,并在感兴趣区
图3. 利用三个AP测量的信号强度(范围)进行三边测量
图4. 基于无线局域网接入点和BLE信标信号的RSS测量的位置指纹方法
域的不同校准点测量RSS值('指纹'),并记录在数据库中。在线阶段就是将移动设备上的RSS测量结果与数据库中记录的指纹进行比较,进行用户定位。特定位置的AP可能与存储在无线电地图中的一组AP不同,因为可以删除某些APs,并且可以更改添加或传输新的APs电源设置。因此,AP选择过程包含在在线定位阶段中。最符合观测到的信号强度的位置被确认为用户位置。指纹识别的一个挑战是,由于环境和APs中设置的变化,以前记录的RSS值可能与当前值大不相同。在所感兴趣的领域删除或添加新的AP需要在数据库中进行修改。RSS测量也可能受到移动设备类型和及其型号的影响。尽管有这些限制,指纹识别技术可以达到合理的准确性,并已成为WLAN定位的主流方法。指纹识别算法可能是决定性的或概率性的。在确定性匹配中,发现一个或几个调查位置与记录的指纹最匹配观察到的RSS值。在概率匹配中,信号强度值表示为概率分布,该算法根据在线测量和RSS数据库数据计算用户位置的概率。
B.无线电地图
无线电地图是作为离线学习阶段的一部分创建的,它包含已知图5的测量RSS值。称为校准点的位置。这种方法的优点是可以捕捉室内环境中信号传播的特点,避免建模困难复杂的信号传播。然而,无线电地图生成所需的数据收集是一个耗时和劳动密集型的过程。无线电地图生成从根据平面图将被调查区域划分为单元格开始。对于每个单元,由不同AP传输的RSS在一定时间段内在校准点进行测量,并存储在无线电地图数据库中。无线电地图中的i-th元素可以表示为[2],[3]:
|
(1) |
||
其中Bi是i-th细胞中心在i-th校准点,阵列由来自的RSS测量组成,Ni是所有传输APs的集合,可以在ith校准点测量到,参数矢量包含在定位阶段任何有用的附加信息,例如天线方向、一天中的时间等。由于人体以2.4GHz频率强烈衰减信号,RSS值可能受智能手机在测量过程中与用户身体的取向和位置、设备差异性以及此时建筑物内人员密度的影响。由于WLAN APs传输功率变化和其他环境变化(如家具和墙壁的位置),无线电地图的精度也会随着时间的推移而降低。因此,必须定期收集新的指纹,以保持无线电地图的精度。
图5. 无线电地图的例子,从[4](转载)
C.决定性指纹算法
大多数确定性指纹识别方法在RSS测量空间中根据欧几里德距离的最小化计算位置,考虑所有'听到'的AP[5]。用户位置估计被选为最近的校准点(Eq.2),即
|
(2) |
||
在在线定位阶段,是来自i-th AP的测量RSS,是i-th AP在站点调查阶段j-th校准点测量的RSS指纹。确定位置指纹算法示例包括NN算法及其概括KNN和WKNN[3], [6],[7]。这些方法通过将数据库中记录的RSS值与移动节点测量的RSS值进行比较来确定移动节点的位置。选择具有最相似RSS值的k校准点。在此方法中,k是一个可以实现更高精度的设计参数。通常,当无线电地图密度高时,k应该很小。对于典型情况下,最佳k值约为3-4。
计算估计出的用户位置对所有k指纹同等重要。概括来说就是将不同的权重分配给指纹,即所谓的加权KNN。加权的常见选择是给在RSS空间中更靠近目标位置的指纹更大的权重。NN是非参数化方法。其优点是简单、稳健且精度相当好。
D.概率指纹算法
许多方法应用概率指纹算法[5],[8],[9]通过估计测量的RSS值的概率分布,鉴于用户的位置的价值,将最有可能的用户的位置概率最大化。因此,问题可以制定为
|
|
(3) |
|
位置分布的后分布通常使用Bayes规则计算:
|
(4) |
首先会分发p(x)包含有关个人用户配置文件的其他信息,例如,倾向于某些特定位置[8]。在大多数出版物中,假设没有关于用户位置的优先信息,并且可以访问所有位置概率相等,即前者是等概率的。分母也不取决于位置,可视为规范化常数。在这种情况下,问题相当于最大可能性估计
|
(5) |
图6. 通过指纹估计覆盖区域,从[11](转载)
此问题的解决方案需要了解描述指纹数据在所有可能位置分布的概率函数。概率函数可以通过直方图或某些参数分布(例如高斯分布)来近似。如非参数化或参数概率化方法。参数算法或基于模型的算法使用少量参数的模型来描述指纹数据。与非参数化方法相比,它们有一个主要优势——数据传输量减少。概率参数位置指纹算法两个广泛使用的例子是覆盖图6。从指纹中估计覆盖区域。(转载自[11])。区域模型和路径损失模型[3],[7],[10]。前一种方法使用椭圆概率分布来建模接收AP信号的区域
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[259164],资料为PDF文档或Word文档,PDF文档可免费转换为Word

