英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
中风的个性化交互式机器人治疗:肌电信号触发疗法
摘要
对肌电信号触发中风病人的机器人辅助治疗(被称为肌电游戏)的系统已经被提出。患者试图移动的动作是由通过选定的肌肉监测肌电信号,然后机器人协助他在水平面执行点对点的运动。除了提供定制的机器人辅助治疗,该系统可以记录信号,以更好地了解中风病人的恢复过程。初步实验旨在测试该系统并获得洞察肌电触发治疗的潜力,以及机器人辅助治疗的报告。
关键字:肌电控制,机器人辅助康复,中风
- 简介
中风是人类致残的主要原因,每年有超过600万人美国人中风,急性中风生还者的80%左右失去臂和手的运动技能。机器人辅助治疗中风患者康复的新兴疗法。一些研究表明,强烈的重复目标导向运动促进中风后的恢复。机器人可以持续和可控的执行重复性任务。他们还配备了传感器,可记录由患者所施加的位置,速度和力,可用于定量和客观地测量患者的电机性能。
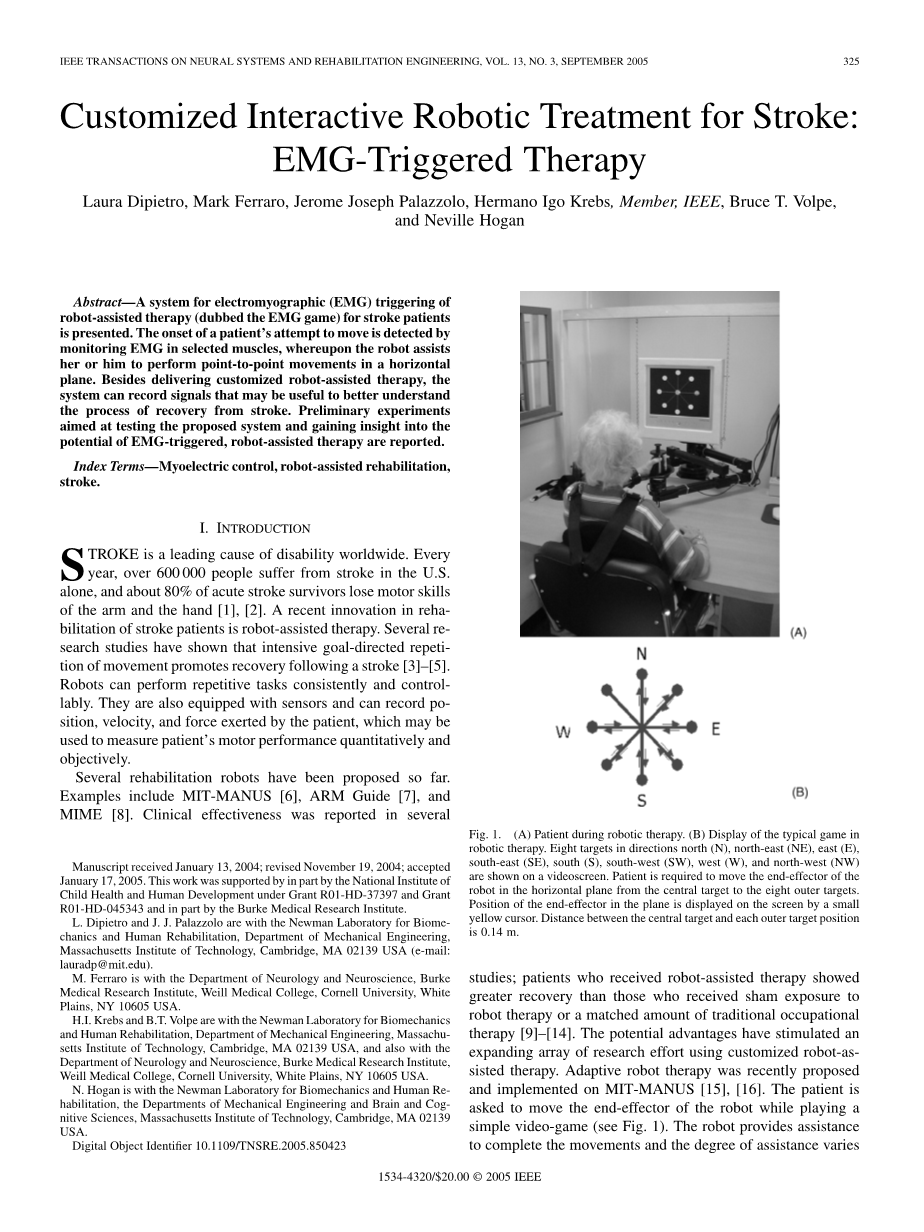
目前已经提出了一些康复机器人。包括MIT-MANUS 、ARM Guide和MIME。在几个临床研究报道中,接受机器人辅助治疗的患者比那些虚假的接触机器人治疗或传统的匹配治疗能够更快的恢复。这些潜在的优势刺激了使用自定义机器人辅助治疗研究工作的不断扩大。自适应机器人疗法是由MIT-MANUS最近提出和实施的。患者在玩一个简单的视频游戏时被要求移动机器人的末端执行器(见图1)。机器人提供帮助以完成运动和援助的程度因患者的运动能力而变化。当机器人末端执行器的速度超过某个阈值时,该病人的动作被检测到。我们研究使用肌电(EMG)信号,即肌肉电活动,触发由机器人提供的援助的可行性。使用肌电信号触发机器人的动作可以提供以下优点。
- 这将允许机器人的治疗是个性化的,例如,通过选择特定的肌肉触发机器人。这可以根据患者的需要用来训练特定肌肉。
- 它将提供一种方法来验证,在机器人辅助治疗过程中患者实际上是在试图产生运动(例如,不是为迎合他们的躯体,以产生超出速度的动作)。
- 在运动信号的基础上,它可能会触发机器人早于触发。
- 它可能允许高度受损的受试者激活机器人的援助,这样的患者可能会产生肌电图信号触发机器人,即使他们无法产生足够的运动。
图1 (A)机器人治疗期间的患者。(B)机器人治疗中典型的运动方向。8个方向,北(N),东北(NE),东(E),东南(SE),南(S),西南(SW),西(W),西北(NW),在屏幕上显示,患者需要移动端部执行器的机器人在水平面的中央目标到八个外部目标。在平面上的端部执行器的位置通过一个小的黄色光标在屏幕上显示。中心目标和每个外部目标位置之间的距离是0.14米。
- 它可以提供理解中风患者恢复过程中的关键数据和患者康复的额外措施,即从EMG信号导出的参数可用于定量、客观地评价患者的运动能力。
虽然使用肌电信号来控制机器人已被广泛研究,但使用肌电信号控制机器人辅助疗法迄今局限于监测前处理对肌肉活化处理后的变化,并确认在接受治疗的患者的肌肉活动或不活动。据我们所知,尚未探索使用肌电信号用于交互式和个性化机器人辅助疗法。
2 背景:肌电控制
在肌电控制中,肌电信号进行处理以生成一个信号,送入控制系统。2类控制信号通常来自肌电信号:1)连续信号:通常是肌电信号振幅,推测肌肉消耗的量度,被用来控制连续变量,如假体运动的速度,2)离散信号:其分析多通道输入的图案识别处理器的典型的输出被用来区分不同类别的肢体的运动,如不同的手势。从历史上看,康复工程是肌电控制领域最早的的应用。主要应用是在1940年代后期由于维纳控制论的探索,用于手臂截肢假肢的控制。最近,远程操作和虚拟现实已经使用肌电信号预测用户意图。
在中风患者康复过程中,最近应用肌电信号触发的神经肌肉电刺激,旨在通过训练对自愿运动的控制促进运动再学习。肌电信号是从给定的肌肉,通常是手腕或手指屈肌记录。一旦患者自愿试图移动和肌电信号超过阈值,神经肌肉刺激器有助于使肢体的充分扩展所经历的运动。这种技术的临床疗效的理论基础是神经生理学,替代运动通路可以吸收并激活,以协助中风损伤传出通路。这个解释是基于感觉整合理论,其中指出,患肢运动感觉输入直接影响后续的电机输出。
在上述许多应用中,肌肉收缩发作的检测是用于识别用户的意图的第一步。单阈值检测器的主要用于此目的的算法,虽然更复杂的方法已被提出。在单一阈值检测器,发病时间是处理后的肌电信号(通常是肌电图信号的包络)超过一个阈值,其被选择以辨别由活性肌肉产生的部件的背景噪声的时间。肌电信号处理和阈值滤波器的带宽等参数对算法的灵敏度和处理延迟都有影响,单阈值检测器易于实现;因为这个原因,它们被选择用于肌电信号运动的设计。
3. 肌电运动
A 硬件
该系统使用InNotion2(交互式运动技术公司,剑桥),后驱动治疗机器人和Bagnoli4(Delsys公司,波士顿)四个差分电极肌电信号采集系统。
B.控制系统
控制系统如图2所示。控制程序是在UNIX操作系统使用C 语言实现。
- 肌电信号预处理:肌电信号记录增益为1000V/V,带宽为205Hz到45050Hz,数字化采样频率为,16位量化(联合电子工业公司,广州,MA)。信号进行高通滤波器(二阶巴特沃斯,截止频率10Hz),全波整流和低通滤波,估计肌电信号包络(均值,长度为,当d=1hellip;4,表示一个数据采集通道)。
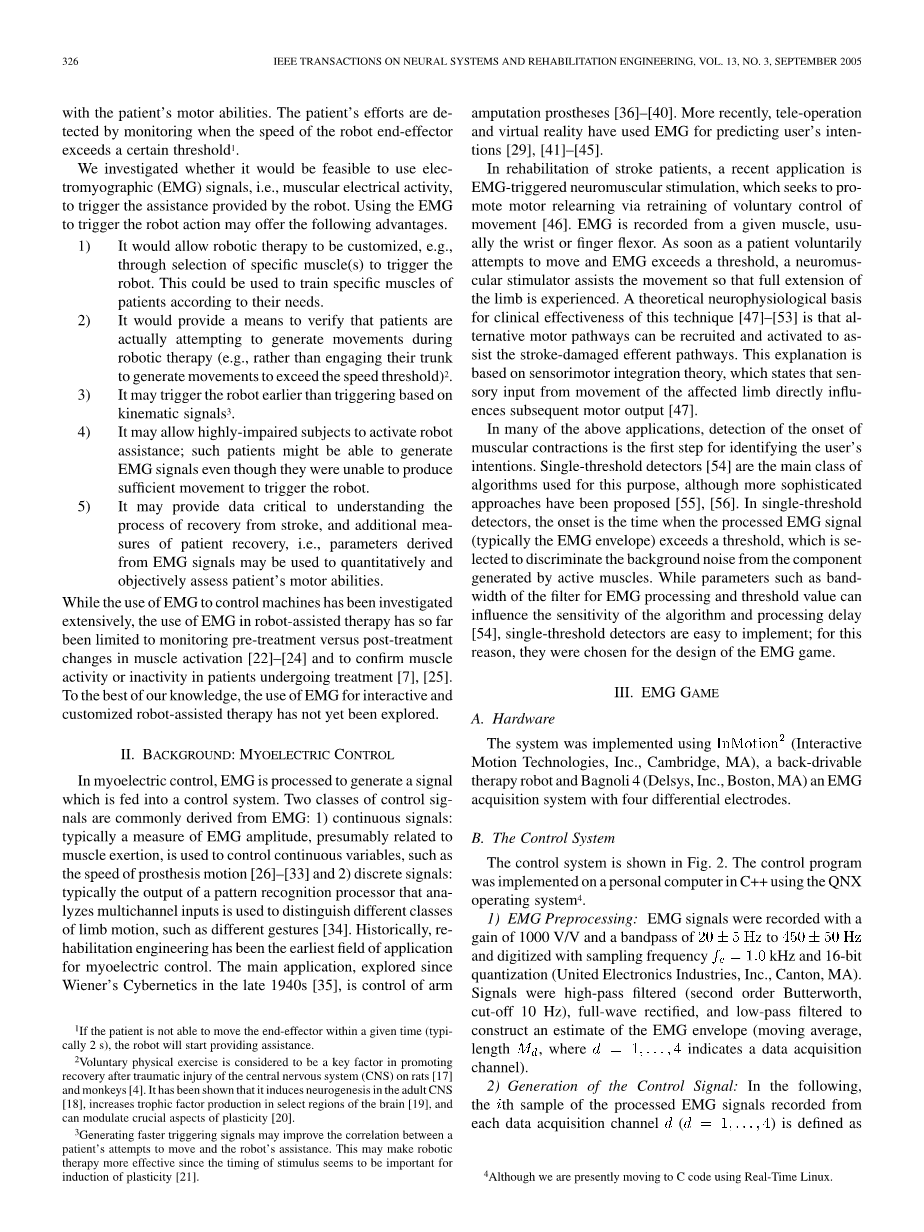
图2 触发肌电信号的算法。给定四个通道的肌电信号,每个信号单独处理,以确定肌电信号的发作,产生一个二进制信号(肌肉变得活跃为1,否则为0)。触发信号TR被由每个信道生成的二进制信号的逻辑或产生。C是机器人的阻抗控制算法生成的肩部(TS)和肘部(Te)的扭矩。
- 控制信号的生成:在下面,第i个样本的肌电信号来自每个数据采集通道d(d=1hellip;4),定义为,当启用机器人布尔控制信号TR,机器人动作被触发(成为1)。
(1)
其中||是逻辑或,是与每个肌电信道相关联的二进制触发信号,定义如下:
(2)
(3)
(4)
(5)
其中N是用于计算上述参数(见下文)的样本数。等式(2)—(5)实现单阈值检测:对每个通道d,检测到发作时超过至少个连续样本(如平均值加倍的标准偏差计算)。如果在任何的肌电信号通道的未检测,机器人的控制信号TR分别保持在0和没有机器人的动作被触发。只要在任何四个通道的检测开始时,机器人的控制信号TR成为1,从而触发机器人的动作。
单阈值检测器的性能可以通过调整的参数,以及的值而改变。这些参数调整对该应用程序提供满意的起始点检测(例如,拒绝那些影响了一些肌电信号的痕迹心电图)。
- 肌电信号运动的控制时间:控制器生成一个视频屏幕上的目标,类似于以前机器人治疗(参照图1),图3表示出了肌电运动控制器的定时。
- 阻抗控制器:一旦机器人的动作被触发,机器人阻抗控制器辅助病人的手臂动作,在其他地方以相同的方式,进行自适应运动。可以移动的控制器使患者独立的达到目标,但它给不能达到目标的患者提供了援助。援助的量根据患者的性能来提供。
病态的受试者中的肌肉张力过大,可能会导致不自主的手臂动作,可以导致机器人的末端执行器的动作,从起始位置之前触发机器人动作。为了防止病人手臂的突然运动的导致机器人被触发,机器人刚度在150牛顿/米初始化以确保温和的手臂定位。
- 选择性触发:以不同的方式来产生所述信号TR可以通过修改(1)来实现。作为一个例子,让通道1的记录从三角肌前(ADD)采取的肌电信号和修改(1)目标相关的方式如下:
图3 肌电游戏控制器对于每个时隙,即运动从中心目标各外目标和背面的定时。病人的手臂被定位在机器人的工作区,其对应于在视频屏幕上的中心目标的中(参照图1(b)中,B部分)。在,外目标被显示给对患者;控制器触发机器人的动作,如果病人没有试图移动之前等待秒。游戏一旦检测到患者的移动就尝试启动。患者必须达到秒内的目标位置;如果需要的话,机器人辅助患者的手臂移动。在外部目标达到后,控制器等待秒,然后显示病人的中心目标,必须在秒内到达。秒后,控制器在一个新的方向显示一个新的目标。每个通道的阈值()在长度为N个采样(1秒)的时间窗口中的时间段结束之前进行计算。对于目标北,在之前计算;对于其余七个目标,在第二个时间结束时计算。
对于目标。 (6)
对于每一个i,机器人行动将只有当EMG1超过T1时被触发。这样的选择(目标方向在本示例中,N,NE,W,NW)对训练肌肉AD发出的指示可能是有用的。目标和肌肉可以选择一个不同的方式为每个病人实施个性化的治疗。
4 实验
我们进行了三个不同的实验。实验Ⅰ旨在探索中风患者的肌电信号特征,以更好地了解EMG触发,机器人治疗(机器人辅助关闭)的潜力。实验II和III(分别为机器人的援助和关闭),目的是测试无助和辅助条件下肌电运动。类似于正在进行的机器人治疗,受试者在机器人面前坐在舒适的椅子上,用肩带当做安全带,他们的肘垫木支架固定在尼龙搭扣带肘支撑。他们被要求移动机器人的末端执行器在水平平面到位于它们前面的视频屏幕上显示的目标。目标被以顺时针方向顺序地呈现,从目标北开始(参照图1)。该序列重复5次。在无人帮助的实验中,如果患者无法移回中心目标,治疗师轻轻引导病人的手臂回到中心位置。
在所有的实验中,用于肌电信号记录电极是由一个职业治疗师根据已建立的建议放置。同意受试者参加在伯克康复医院,纽约州White Plains进行了测试。实验知情同意程序是由麻省理工委员会麻省理工学院和伯克康复医院机构评审小组批准,在使用人类作为实验对象。
A 实验Ⅰ:肌电信号探查
两个不受影响的受试者(正常人1和2)和五例中风患者参加了本次实验(病人1–5)。患者1和2分别为门诊病人中度和轻度偏瘫;例3,4和5分别为在治疗重症偏瘫(严重偏瘫的上肢Fugl-Meyer(FM)组件入院时分别为18/66,30/66,8/66,0/66和4/66)。对于未受损害受试者和门诊病人,脑电信号由以下肌肉记录:胸大肌锁骨部分(PEC),背阔肌(LAT),三头肌长头(TRIC),中三角肌(MD),肱桡(BRA),大圆肌(TM),冈下/小圆肌(INF),前三角肌(AD)肱二头肌(BIC),后三角肌(PD),上斜方肌(UT),低级斜方肌(LT),以及中间的斜方肌(MT)。这些肌肉被选中是因为根据以往的研究他们的活跃程度不受受试者的影响。为了从所有的肌肉所记录数据的收集,巴尼奥利4记录四通道的协议必须重复四次。对于患者,由于可以通过康复方案了解他们治疗时间表,肌电信号仅来自述肌肉的一个子集记录:PEC、BIC、TRIC和UT。这些肌肉被选中,因为他们在被期望的肌肉中显示最高的调幅度。
B 实验II和III:无辅助和辅助运动触发肌电信号
一个未受损害的主体(未受损害的主体3)和两个中风严重偏瘫患者(患者6和7;在病历11 / 66和无法接纳FM上肢部分)参与这些实验。肌电信号来自PEC,AD,BIC和PD。这些肌肉被选中是因为实验1中,它们在其他肌肉之间显示最高调制幅度以及它们比其他13个肌肉更容易记录(即在UT中,实验1更容易)。
5 结果分析
- 个性化治疗需求:所有除了患者5(见下文)受试者能够朝向外的目标移动,并且反回。对每一个主体,朝向特定目标移动,发现几个肌肉有活性(EMG显示调制)。对不受影响的受试者,肌肉激活模式是跨学科相似的、与以前的研究结果相一致。在中风患者中,不同的高度跨学科的模式,即患者完成类似动作的不同时间激活不同的肌肉。例如,从患者2胃肌信号显示在任何方向几乎没有调制,但患者1、3、4显示调制。从中心到目标北运动,患者1,BIC的发现是高度活跃的,而不受影响的受试者,BIC被发现主要在从目标北回到中央目标的运动是活跃的。
这些研究结果表明,不同的患者可能需要重新学习如何激活不同的肌肉。肌电信号可以让特定的肌肉选择性训练。
- 高度受损的受试者的肌电触发:图4显示了病人5的数据。这名患者是不能够在任何方向移动。然而,在不移动的情况下,她的肌电信号的数据显示一些调制。在其余的患者中,有几个肌肉呈现比受到损害个体相应的肌肉较弱或更慢的激活。例如,在患者1朝向目标北运动,AD包络信息缓慢增加(而在受到损害受试者之前迅速增加或尽快移动发起)。然而,它仍然能够触发所述机器人
动作(见表1)。
表1
<td
剩余内容已隐藏,支付完成后下载完整资料</td
资料编号:[152562],资料为PDF文档或Word文档,PDF文档可免费转换为Word
|
alpha; |
编号 |
|
|
|
|
|
alpha;=1 |
正常1 |
0.0790.117 |
-0.0640.129 |
0.0810.116 |
-0.0600.130 |
|
正常2 |
-0.1130.228 |
-0.1750.224 |
-0.0660.270 |
-0.1720.222 |
|
|
患者1 |
0.4192.999 |

