
英语原文共 16 页,剩余内容已隐藏,支付完成后下载完整资料
基于离散曲线结构和应用的特征点检测
Hayat Nasser a , b, Phuc Ngo a , b, Isabelle Debled-Rennesson a , b,*
a Universiteacute; de Lorraine, LORIA, UMR 7503, Vandoeuvre-legrave;s-Nancy, F-54506, France
b CNRS, LORIA, UMR 7503, Vandoeuvre-legrave;s-Nancy, F-54506, France
摘要
在本文中,我们研究了数字曲线上的特征点检测的问题,其中包括寻找局部最大曲率的点。由于先前对曲线分解为离散结构序列的研究[1],[2],[3],即宽度为nu;[4]的最大模糊段,在[5]中提出了一种初始算法来检测特征点。然而,启发式策略仅用于识别主导点。我们现在提出一种修改的算法,没有使用启发式算法,只是使用了一个简单的角度测量。除此之外,我们还提出了两个应用方案:(1)通过对于权重的关联以简化多边形,从而减少检测到的特征点的数量;(2) 使用从减少的特征点发出的多边形的分类。实验结果证明了该方法的有效性和可靠性。
1.简介
离散曲线的特征点由Attneave [6]定义为曲线上的局部最大曲率点。这些点具有足以表征该曲线的丰富信息。特征点被认为是对象轮廓的代表性特点,因为它们保留了数字化图像曲线的重要特点。它们在曲线近似,图像识别和匹配以及计算机视觉等其他领域中发挥着关键作用[6]。特征点检测方法从数字轮廓中选择点,可以使用较少数量的点来有效地表示曲线。然后将数字曲线表示为多边形,其中特征点为顶点,将相邻特征点连接成的线段作为边。因此,可以使用特征点来分割轮廓。关于特征点检测,前人已经做了许多工作[5],[7],[8],[9],[10],[11],[12],[13],[14],[15], [16],[17],[18],[19],其中一些问题已经得到了确认:时间计算,参数数量,起点选择,噪声曲线导致的坏结果,......
最近的特征点检测方法可以归类为如下几种(更多细节见[20]):一些使用动态编程[21],[22],[23],[24],而其他使用分裂[25],[26]使用合并[27],使用数字直线段[5],[9],使用断点抑制[11],[13],[14],[28],运用曲率和凸状性进行检测[17],[29],[30] ]。
大量用于特征点检测的算法对曲线轮廓上的每个点都有一个支撑域(ROS)[11],[17],[28],[29],[31]的概念。曲线C的点的支撑域包含其在C上的相邻点。对于曲线C上的每个点,计算与其ROS相关的具体度量。通过抑制具有最低测量值的点来确定特征点。另一方面,存在许多使用曲率值的近似结果[17],[29],[30]来确定DP。其他方法使用抑制断点的原理[11],[13],[24],[25],[26],[28],[32]来获得DP。
Nguyen等人在[5]中提出了根据离散几何理论结果推导出的顺序方法,它只需要设置一个参数,它对起点的选择是不变的,它适用于可能有噪声或分离的离散曲线。它依赖于所研究曲线的几何结构,特别是曲线分解为给定宽度的最大模糊区段[2],[4]。然而,在所提出的方法的最后,特征点的选择是通过启发式策略完成的。
在本文中,我们将Nguyen的方法[5]改进为非启发式。我们使用单一宽度值将曲线分解为最大模糊段。通过简单的角度测量,提出了这种改进的主导点检测算法,其中有效地选择了特征点。
此外,本文还提出了一种多边形简化算法,以减少检测到的特征点的数量,同时保留离散曲线边界的主要角度偏差。我们提出了两种多边形简化策略。第一个是确定要获得的特征点的数量。第二种是根据错误标准对检测到的特征点进行自动选择。我们还证明了特征点检测方法在分类领域的有效性。
本文的其余部分如下所示:在第2部分中,我们回顾了本文中用于分析曲线在离散几何中的结果。然后,在第3节中,我们提出了对先前特征点检测算法的改进[5]。在第4节中,我们提出了实验结果,并与以前的方法进行了比较。在第5节中,我们介绍了两种多边形简化策略,以及我们提出的方法与其他一些多边形简化算法之间的比较。在第6节中,我们提出了分类的申请。在第7节中,对主要结论进行了总结。
2. 离散曲线分析的几何工具
下面我们回顾一下本文中用到的关于离散线[33]、模糊段[1]和最大模糊段[4]的几个概念。离散线(a,b,mu;和omega;是整数,gcd ( a , b ) = 1)是用来验证mu; le; ax minus; by lt; mu; omega;的整数点的集合。
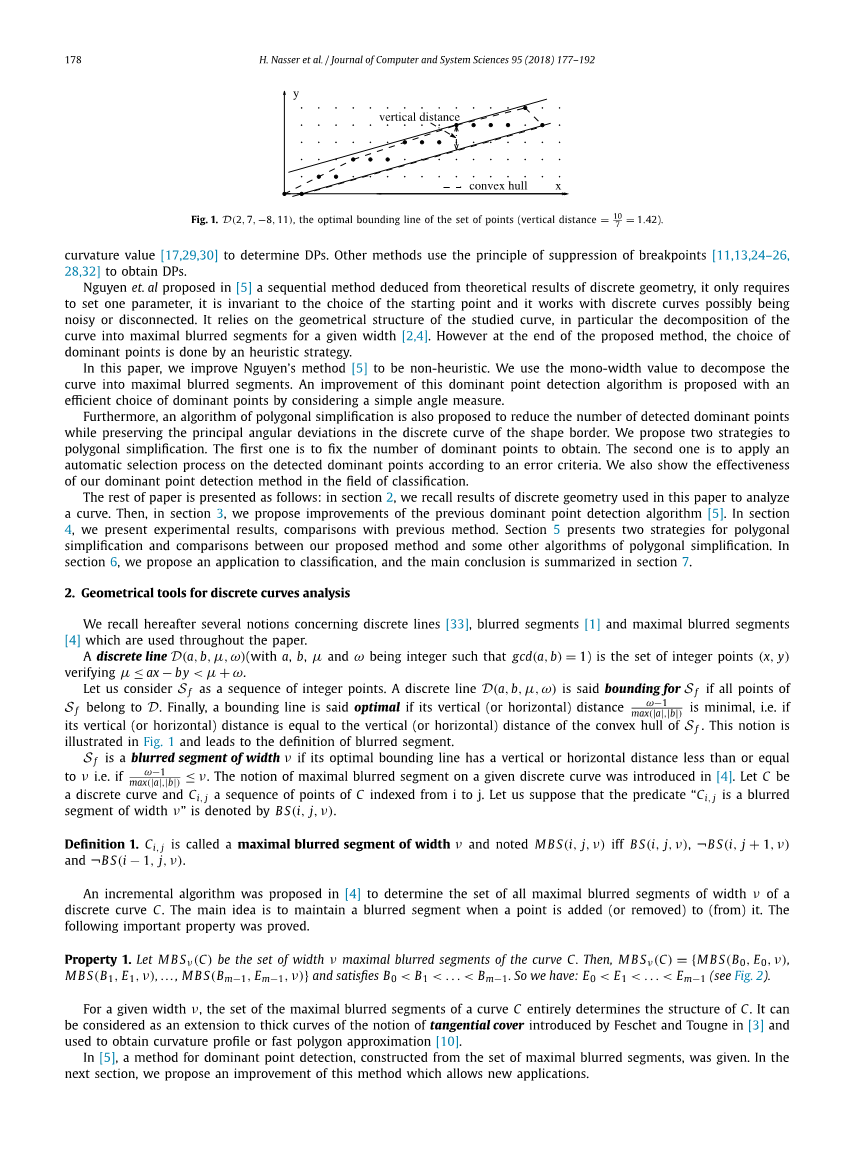
让我们考虑Sf作为整数点的序列。如果Sf所有点都属于D,则称Sf为离散线D的边界。 最后,如果边界线的垂直(或水平)距离最小,即如果其垂直(或水平)距离等于Sf凸包的垂直(或水平)距离,则边界线被称为最佳边界线。这个概念在图1中示出并且导出了模糊段的定义。
图1 d(2,7,-8,11),点集的最佳分界线(垂直距离= 10/7 = 1.42)
如果其最佳边界线的垂直或水平距离小于或等于nu;,则Sf是一个模糊的宽度段。在[4]中引入了给定离散曲线上的最大模糊段的概念。 设C是离散曲线,Ci,j是从i到j索引的点序列。让我们假设Ci,j “宽度为nu;的模糊段”由BS(i,j,v)所表示。
定义1
Ci,j被称为宽度为 nu;的最大模糊段并且被注明MBS(i,j,v)当且仅当BS(i,j,nu;),not;BS(i,j 1,nu;)和not;BS(i-1,j, nu;)。
在[4]中提出了一种增量算法来确定离散曲线C的宽度nu;的所有最大模糊段的集合。主要思想是当一个点被添加(或移除)到(来自)它时需保持模糊段。它证明了以下重要性质。
性质1
将MBSnu;(C)设置为曲线C的宽度nu;的最大模糊段的集合,然后,MBSnu;(C)={MBS(B0,E0,nu;), MBS(B1,E1,nu;), hellip;, MBS(Bmminus;1,Emminus;1,nu;)} 并且满足B0lt;B1lt;hellip;lt;Bmminus;1.所以我们有:E0lt;E1lt;hellip;lt;Emminus;1。(见图2)
图2.具有灰色像素的曲线的宽度1.4最大模糊片段的集合(每个红色框界定宽度为1.4的最大模糊片段的像素)。 指示四个第一最大模糊段的开始(Bi)和结束(Ei)点的索引(B0 = 0且E0 = 15,B1 = 5且E1 = 17,......)。 具有蓝色框架的点是公共区域中的点 - 交叉区域 - 由这四个第一最大模糊区段定义。(有关此图例中对颜色的引用的解释,读者可参考本文的Web版本)
对于给定的宽度nu;,曲线C的最大模糊段的集合完全决定了C的结构。它可以被认为是Feschet和Tougne在[3]中引入的切向覆盖概念的粗曲线的扩展。用于获得曲率轮廓或快速多边形近似[10]。
在[5]中,给出了由最大模糊段集构成的特征点检测方法。 在下一节中,我们建议对此方法进行改进,以允许使用新的应用情景。
3.特征点检测
曲线的最大模糊段的集合提供关于所研究曲线的几何结构的重要信息。最大模糊段的宽度允许使用不同的比例并考虑可能存在于曲线C中的噪声。
在[6]中,Attneave将曲线上的特征点(角点)定义为局部最大曲率点。 以类似的方式,[5]中提出的方法使用离散曲线C中的点的支撑域(ROS)的概念,用一系列离散点定义, C=(Ci)i=1..n。
定义2
宽度nu;最大左侧和右侧的模糊点构成其支撑域(ROS)。 它们之间的角度称为此点的ROS角度。
该方法首先选择宽度nu;并计算MBSnu;(C),C为最大模糊段的集合。该方法的主要思想是,特征点C中的连续最大模糊段的共同区域C被局部化(参见图2)。此后,我们回顾[5]中使用的属性和启发式策略。我们将证实可能会出现问题并提出解决方案。
3.1. 启发式方法策略[5]
现在让我们考虑超过2个连续的最大模糊段的公共区域。
命题1
连续宽度nu;最大模糊段的最小公共区域,其斜率增加或减少,包含一个候选特征点。
命题2
最大模糊段包含最多2个特征点。
基于先前的命题,Nguyen等人提出了算法。在[5]中,在于找到由宽度为nu;的连续最大模糊段引起的最小公共区域,其具有增大或减小的斜率。据说这样的区域包含候选特征点,因为该区域中的点具有最小的ROS角度。通过启发式策略,特征点被确定为该区域的中间点。
中间点的选择是启发式的,在下一节中,我们提出了一种与曲率相关的新策略,以识别公共区域中的特征点。
3.2. 新的主导点检测算法
在本节中,我们提出了一种改进的算法[5],用于高精度地检测离散曲线的主导点。
由于主导点检测的目的是检测具有曲率极值的重要点,我们提出了一种新的公共区域中主导点的决策策略。为此,我们使用一个简单的度量作为伪曲率,估计位于感兴趣区域中的每个点。受 k -cosine测量[31]的启发,我们使用适合分解为宽度nu; 的角度测量输入曲线的模糊部分。更确切地说,它是所考虑的点与左和右最大模糊区段的左右两个末端之间的角度,涉及所研究的公共区域的定位并且穿过该点。应该提到的是,这种角度测量在ROS中通常不对称,与k -cosine测量相反。显然,角度越小,曲率越大,因此点的主导性越高。因此,主要点被识别为在公共区域中具有局部最小角度度量的点。
修改后的算法在算法1中给出。除了如上所述的主导点的选择之外,它类似于[5]中的那个。此外,我们简化了过程,因为我们不需要将位于公共区域中的最大模糊段的斜率分解为单调序列。实际上,角度计算允许很好地定位每个公共区域中的主导点。
算法1 特征点检测
特别地,在该算法中,每个公共区域由线6计算,其中q是公共区域中涉及的第一最大模糊区段的索引。p-1是最后一个的索引。公共区域中的点是点Ci对于iisin;[[Bp-1,Eq]]
而且,在第7行,功能Angle对于公共区域中的每个点,计算该点与其两个末端之间的角度。然后,在公共区域中,主导点是具有局部最小角度的点。然后,通过考虑前一个区域的最后一个段(索引p-1)作为下一个公共区域的第一个段(索引q)来计算下一个公共区域。该过程允许检测曲线的点,最大数量的最大模糊段通过该点(参见图3)。
图3 利用宽度为1.4的最大模糊曲线段获得的感兴趣区域(具有灰色像素公共区域)
如果曲线C没有关闭,第一和最后点C是占主导地位的点,必须将它们添加到d。
该算法如图3所示 ; 通过算法分析曲线C。计算MBS1.4(C)的集合得到12个最大模糊段(图中名为s 0到s 11)。它们在曲线中的定位由属于所考虑的最大模糊区段的每个点的一个星(⁎)表示。算法检测到四个公共区域(曲线上的暗像素)C14 至 C15, C22 至 C26, C49 至 C52 和 C59 至 C62。图中的粉红色框允许计算通过公共区域的每个点的最大模糊段的数量。通过考虑公共区域中涉及的第一最大模糊区段的起始点和最后涉及的最大模糊区段的终点来计算角度。在表1中示出了在共同区域和许可证的各个点的角度来推断特征点(极小值以粗体显示在表中的对应点是在红色中图3)。在公共区域4中,所选择的特征点不位于公共区域的中间。
表1 公共区域每个点的角度(见图3)
全文共20182字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[1912]
|
公共区域 |
点 |
角度(度) |
|---|---|---|
|
共同区1 |

