英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
气动肌肉动力学特性的建模
摘要
研究了气动肌肉(PM)系统以确定三元素模型是否可以描述其动力学。就作者所知,这个模型还没有用来描述PM的动态。一个新的现象学模型由平行的收缩(产生力)元素,弹簧元素和阻尼元素组成。使用允许通过线性伺服阀实现精确且精确的致动压力(P)控制的设备来研究PM系统,PM的长度变化通过线性电位计测量,P的弹簧和阻尼元素函数通过静态微扰法在几个常数P值下确定。这些结果表明,在P常数下,PM的行为与平行的弹簧和阻尼器相同。P的收缩单元函数由对P中的阶跃输入的响应来确定,使用来自摄动研究的弹簧和阻尼元素的值。研究表明,三元素模型的结果系数函数精确地描述了P的阶跃输入的动态响应,表明静态扰动结果可以应用于动态情况。通过准确预测对三角形P波形的收缩响应,该模型得到进一步验证。所有这三个元件都具有压力P的压力相关系数,其范围为207 lt;P lt;621 kPa(30 lt;P lt;90 psi)。P(松弛PM)逐步降低的研究表明,松弛期间阻尼元件系数小于收缩。
关键词:人造肌肉,McKibben肌肉,气动执行器
介绍
气动肌肉(PM)是一种有趣的致动器(与动物骨骼肌非常相似),它具有两个显着的重要优点。
-
功率/重量比为1 W / g。
(2)功率/体积比为1 W / cm3。
这两个比率与电动机或液压致动器的相比,大约高出五倍。当然,整个PM系统必须包含气体供应,因此在比较系统性能时必须考虑到这一点。气动致动器系统可用于机器人技术中,包括灵巧操纵器,用于功能恢复治疗的物理治疗,以及涉及人体的强度增强装置,这些装置必须自行携带并远距离运行。原来,气动肌肉被开发为人体手臂的致动器,气压肌肉的工作方式与人类或动物肌肉的作用方式类似(力量或时刻仅通过收缩的作用而产生)。最近,菲利普斯及其同事制定了一个姿势控制策略,用于在大腿和髋部具有PM的人体外骨骼。在这个模型中,PM的一维收缩导致了外骨骼的二维运动。
气动肌肉系统技术的另一个优势在于其能够像“软性致动器”一样执行。在机器人学文献中,这指的是在结构失效的情况下,对人类(如果靠近产生力系统)的伤害风险非常低。对于液压和/或电动马达执行器来说情况并非如此,当致动器失效时,其对靠近该装置的使用者造成更大的伤害风险。
气动执行器的主要问题包括气动肌肉执行器的不准确和困难的控制,这主要是由于气体的可压缩性导致的高顺应性。在气动肌肉的情况下,包含在编织鞘内的气囊的非线性弹性和压力下的气囊/鞘结合的机械特性是额外的考虑因素。经典控制的方法需要一个系统模型来设计一个控制器。本文考虑了一种新型简单的气动肌肉模型,该模型可用于帮助控制系统的开发,以便气动肌肉执行器可以更好地在工业机器人以及假肢,矫形器以及人类辅助系统等中执行其预期功能。
气动肌肉的操作原则
如图1(a)所示,PM系统的基本操作原理是将一个薄壁橡胶囊(顺从材料)置于轴向刚性但径向柔顺的编织护套内。随着橡胶囊因压力增加而膨胀,组合鞘和囊组件的直径容易在径向上变化,并且肌肉在轴向方向上缩短。因此,施加在环境上的力沿轴向发生。作为这种相互作用的结果,所产生的大型收缩力可以以高速度(高功率)执行外部工作。然而,非线性存在于囊内的压力变化,因为它的面积与直径的平方成正比地扩大。另外随着外护套材料的移动,其长度取决于涉及非线性的外护套材料的三角关系。Chou和Hannaford和Caldwell给出了对环境产生的净力的理论估计。
背景
气动肌肉致动器,或者有时被称为McKibben气动人造肌肉,是在1950年代和1960年代早期作为矫形肢体系统的一部分开发的。McKibben显然没有公布他的原始工作,但Baldwin引用了这样一个方程式,即将具有轴向排列纤维的PM的收缩长度和收缩力与内部压力相关联。Baldwin延伸了McKibben对非零直径管理的理论。
尽管Baldwin声称轴向张力纤维可能具有较高的机械效率,但在二十世纪六十年代,使用双螺旋缠绕纤维作为内囊周围的壳体的设计变得更受欢迎。Schulte似乎是第一个分析由螺旋缠绕的PM产生的压力的人,而其他人基本上获得了类似的结果。最复杂的是:用方程将收缩力与压力联系起来,当螺旋纤维垂直延伸到管轴线时PM的直径,组合壳体和气囊的厚度以及螺旋角相对于轴向的三角函数。这种方程式适用于PM的机械设计,但由于方程参数在驱动过程中无法测量,因此无法对执行器控制系统进行建模,这对于经典非线性控制是必需的。
PM的控制问题似乎导致了PM研究近30年的停顿,最终以Inoue和Caldwell的研究结束。Caldwell将这种控制困难归因于位置控制和空气顺从缺乏准确性的相关问题,从而导致位置随负载变化而变化。其中后者的缺点和对压缩空气供应的需求也导致人工和矫正应用的PM被遗弃。
Inoue讨论了普利司通开发的编织气动致动器在机器人中的应用。他的设备使用一个激动剂/拮抗剂对(通过骨骼肌生理学的术语借助钢丝绳连接的致动器在滑轮上),他确实提出了滑轮旋转角度的二阶模型,强制函数与提供给执行器对的压力差成比例。在该模型中,存在一个与滑轮角速度成比例的摩擦项以及与滑轮角度成比例的弹簧项,后一项允许开环位置控制,这对于电机或气缸伺服系统是不可用的。尽管Inoue确实给出了收缩力和压力之间的关系,也被其他人使用,但是摩擦或弹簧系数和压力之间没有明确的关系。Inoue研究中的一个有趣点是,它使用PM对之间的压差而不是单个PM的压力。
Winters和Hannaford和Winters描述了对使用PM的假肢应用的兴趣。 Chou和Hannaford描述了编织PM的静态和动态特性以及气动回路动力学建模。 然而,没有提出PM的动态行为的现象学模型。
在本文中,我们描述了一个新的PM动力学现象模型。该模型是弹簧元件,阻尼元件和收缩力元件的并联布置。每个元件的系数是致动压力的函数。
理论
气动肌肉模型
该模型如图1(b)所示,它是弹簧元件,阻尼元件和收缩元件的平行布置,是Voight粘弹性模型的一种改进。在本文中,元素系数作为感兴趣的自变量函数的表达式,压力(P),是通过实验确定的。该模型与希尔的骨骼肌模型不同,它有一个平行弹簧,而不是弹簧串联和平行。
让y定位,所研究的运动方程就变成了
其中K是弹簧系数,B是阻尼系数,Fce是由收缩元件提供的有效力。对于这里给出的实验配置,图1(b)中的外力F是由重量(Mg)加上惯性负载(M)引起的负载。假设系统中的所有质量都处于负载M的垂直定向质量,注意,当Mg = Fce和零初始位移和速度[y(0)=(0)= 0]时,不会发生运动。对于小于这个的载荷,Fcegt; Mg和方程(1)的右边成为所研究系统的驱动函数。
由Chou和Hannaford给出的收缩力Fce也取决于鞘的几何因素以及鞘/囊组合的厚度,其他理论方法在收缩期间忽略肌肉弹性来预测PM的长度。最近,Klute和Hannaford在一个有关PM的输出力的理论中包含涉及到了囊的弹性。
在一个稳定的状态P,因此恒定的Fce下,PM进一步被模拟为一个弹簧元件和阻尼元件并联,或Voight模型。我们进一步推测,通过扰动常数P下的负载确定的弹簧和阻尼系数函数与动态条件下的相同。
方法
气动肌肉(PM)
两个几乎完全相同的PM由内部气囊构成,内部气囊由22.2毫米(7/8英寸)直径的自行车轮胎管(27-s-143尺寸)封装在用于支撑电缆的尼龙护套中(Astro
Industries, Inc., Dayton OH, Cat. No. SCGRP-120-1250-0)未拉伸未压缩时护套的直径为31.75毫米(1.25英寸),一端用软管夹紧在内部制造的适配器上,该适配器将管状连接器固定到比例控制阀(Festo Corp., Hauppauge, NY, model MPPE-3-1/8-10-010B),该阀连接到调节的气体压力源,如图2所示,将PM的另一端软管夹紧在一个封闭的适配器上,连接到一个重物堆上。注意,由于滑轮的2:1传动,PM上的负载是滑轮系统加上堆叠重量除以2。该管状连接器由9.50毫米(3/8英寸)螺栓和4.75毫米(3/16英寸)孔沿中心钻出。PM的无负载长度约为140毫米(5.5英寸),不带适配器的重量为0.059千克(0.13磅)。
实验仪器和数据收集
如图2所示,PM垂直放置在一个透明的塑料室内。通过皮带轮,挂钩和链条直接悬挂在PM下方,可变重量堆栈被悬挂。另一个PM平行放置在皮带轮周围,可以用作拮抗剂PM,如图2所示,但没有加压,因此在本研究中只是被动的。然而,图2中显示的另一颗PM单独用于一组类似的实验中,其结果在此处被报道,其中前者是被动的。滑轮,吊钩和支撑设备的重量为26.7 N(6 lb)。
肌肉的长度变化通过连接到PM的移动下端的低摩擦线性电位计(Duncan Electronics Inc.,Costa Mesa CA,50kV Slideline)测量。PM的顶部(带有气体入口连接器)固定在水平支撑梁上。
压力传感器(Omega Engineering, model PX906-500-GV, 0-500 psi)测量PM的入口压力,并位于入口上游约150 mm(6 英尺)处。如前所述,称重传感器(A.L. Design Inc., model ALD-DLC, 250 lb)放置在PM测量负载的上方和下方,也可以通过堆叠和滑轮系统的一半重量来确定。
使用基于多通道PC的数据采集系统收集数据。该程序被编程为打开伺服阀到调节气体供应,提供到PM的压力逐步增加(伺服阀时间常数为0.3s)。数据运行由每个通道800个点组成,因此,在64Hz采样频率 ,收集了12.5s的数据。
研究了207-621kPa(30-90psi)范围内的压力和57.8-898N(13-201.8lb)范围内的负荷。在较低压力下,由于PM的缩短能力有限,因此不能使用全范围的负载。
结果和讨论
摄动(“Bell Ringer”)研究
为了提供B和K的独立估计值作为压力的函数,在压力达到稳定状态后,我们突然从较大的重量堆中减少重量,因此,描述如何由两名技术人员同时拉动一部分负载的“Bell Ringer”在绳索上。这是以68.9kPa(10psi)的步长在207-621kPa(30-90psi)的恒定压力下完成的。414 kPa(60 psi)的结果示例如图3所示。曲线的第一部分归因于414 kPa的肌肉收缩,负荷为347 N(78 lb)。在约6秒时,突然移除了111N(25磅),肌肉又收缩了5.6毫米。请注意,这代表了Caldwell早些时候提到的负载变化时的长度变化。选择347 N的负载是因为它是一个代表性负载,大约是PM可以提升的最大负载的一半。突然移除的负载约为初始负载的三分之一。从称重传感器数据中估算出去除重量的时间,并且在所有情况下小于0.1s,或者约为所得长度变化的时间常数的三分之一。由于负载减小导致的PM没有立即位移,也没有因为压力保持恒定而引起的收缩力Fce的变化,所以在部分负载移除后的长度变化由弹簧和阻尼元件平行适当地调节,如前面提到的。弹簧和阻尼系数K和B分别通过将数据拟合到Voight模型来确定。这个实验在每个压力下重复三次。结果如图1和2所示。图4和5.K和B都随着压力线性增加,但B的结果变化较大,相关系数较小,为0.733,而K为0.971。然而,每个拟合在0.01的水平上都很显著。B中的变化可能是由于实验过程所致,因为B完全依赖于曲线的瞬态部分,而K主要取决于去除的负载和肌肉的位移。由于剩余载荷的弹跳而引起的振动可能是B中的散射源,特别是在图5中的550kPa(80psi)时明显.B和K可能是负载的功能,并且移除的负载是也可能。如下一节所示,三元模型(K和B仅依赖于压力)密切预测整个阶段对压力响应的瞬态部分表明这种影响并不显着。
收缩研究:对压力的阶跃响应
额外的收缩研究在207,345,483和621kPa(30,50,70和90psi)下完成,负荷分别为57.8,80.1,125,169,236,347,458,570,681,792和899N(13,18,28,38,53,103,153,178和202lb)。57.8和80.1N的载荷仅用于207kPa两个肌肉中的一个,一些较重的载荷只能在较高的压力下提升。
图6显示了在483 kPa(70 psi),347 N(78磅)载荷下研究的两块肌肉之一收缩的典型示例。这些曲线在形状和大小上与预期类似。收缩开始之前有一段时间延迟,所有曲线都在此延迟后进行分析。这个延迟是根据采样数据确定的,即从压力传感器测量的压力阶跃的初始上升到由电位计测量的PM的初始运动之间的时间。 随着负荷的增加,延迟增加,随着压力的增加,延迟增加,对于所研究的两种PM,收集的所有数据平均为0.23plusmn;0.185 s。这种延迟在文献中已经注意到,归因于库仑或鞘与囊之间的静摩擦(“静摩擦”)。附加的小震颤信号(抖动)可以减少这种粘连。
收缩曲线符合模型长度变化的过阻尼解决方案,用于逐步增加压力。使用上一节描述的铃声或扰动研究中的K和B,以便由曲线拟合确定的唯一参数是收缩力Fce。 请注意,如此确定的Fce不依赖于收缩曲线的瞬态部分,而仅依赖于稳态部分。
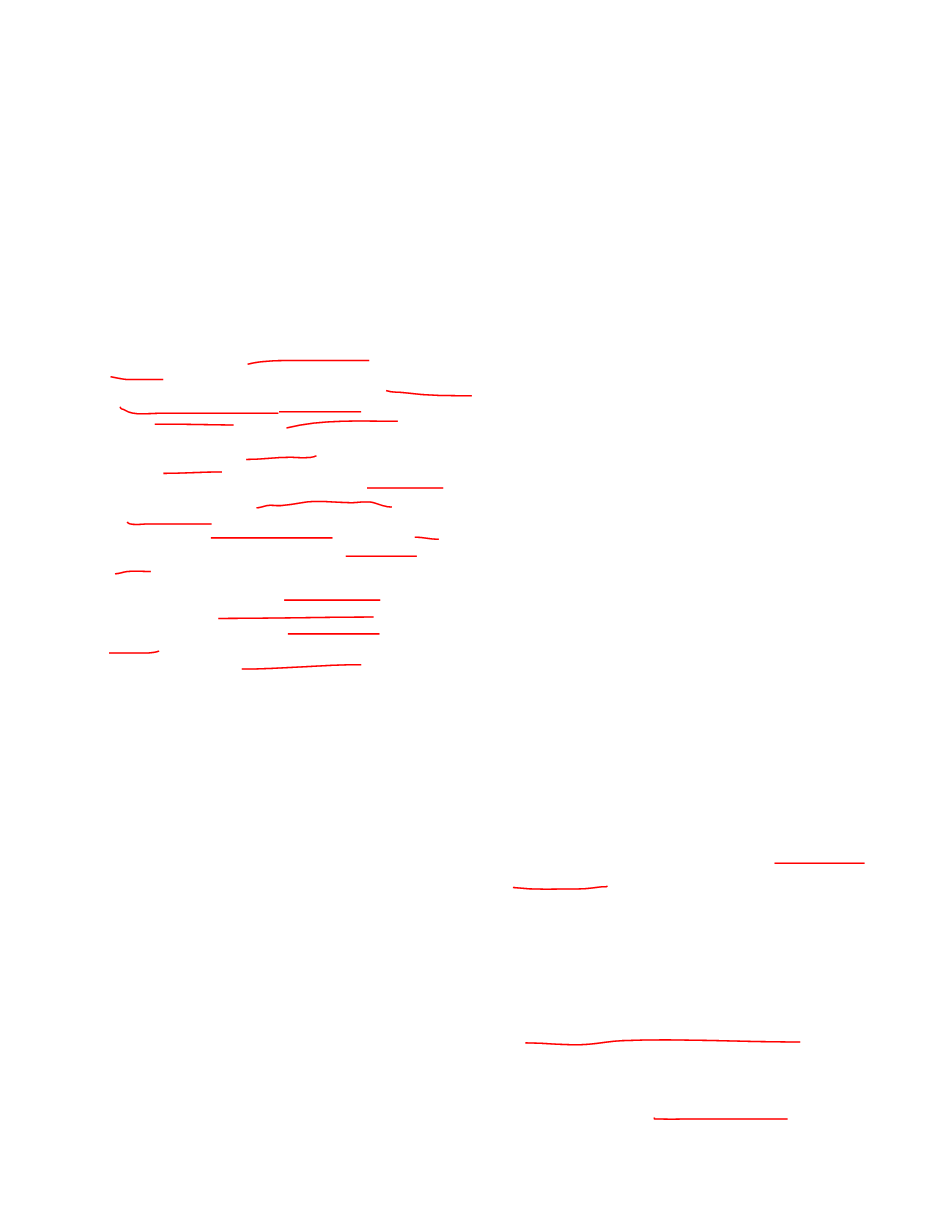
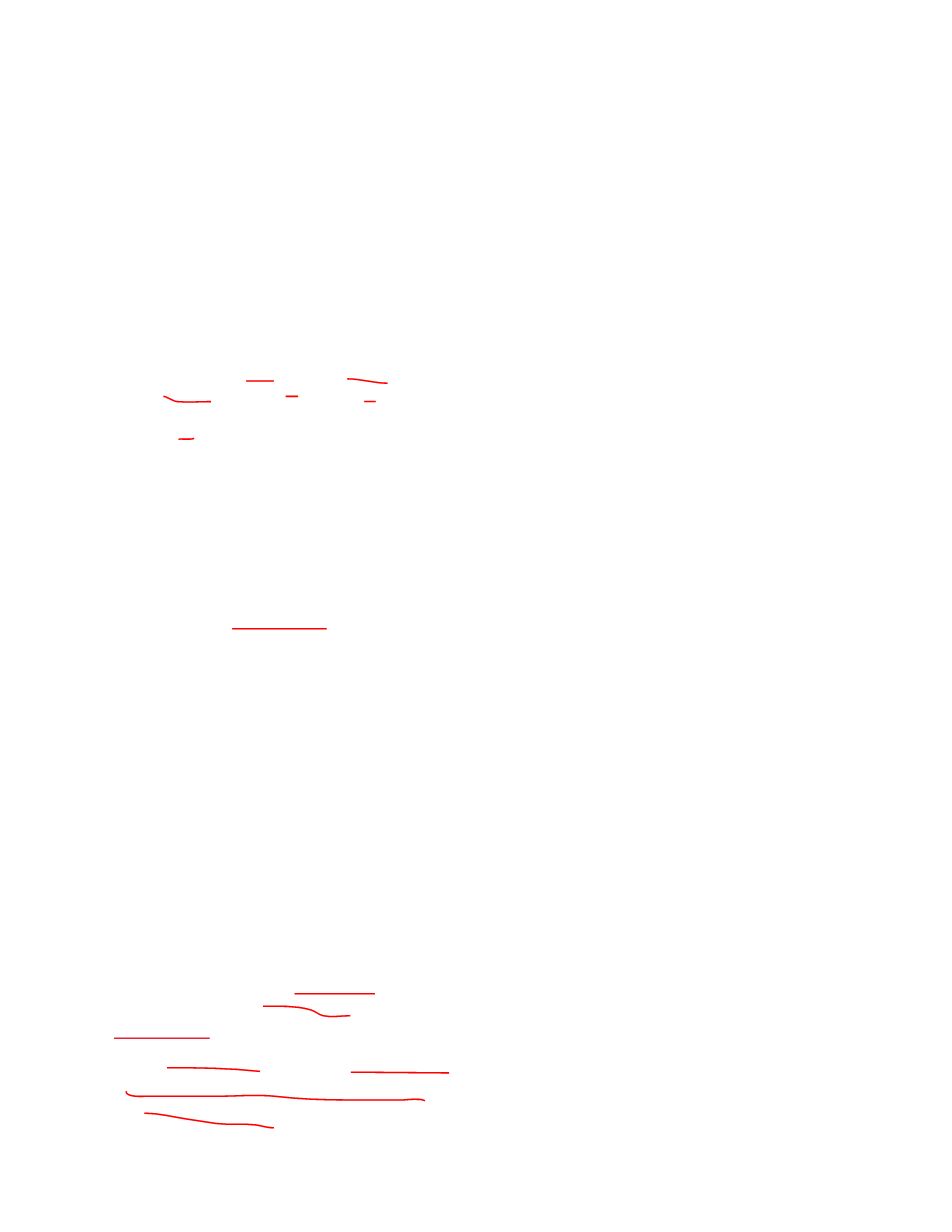
图7所示为在多个负载下两个相似但独立测试的肌肉的估计Fce。所示的水平线表示在给定压力下的平均值。虽然两种PM的结果之间的差异在621 kPa(90 psi)时对于小于681 N(153 lb)的载荷是显而易见的,但在较低的压力下,结果实际上是一致的并且难以在图中加以区分。估计值与负载变化不大,但随着压力增加。除了在621千帕(90磅
全文共7796字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[16688],资料为PDF文档或Word文档,PDF文档可免费转换为Word

