英语原文共 14 页
文章
基于力反馈电阻的地面反作用力实时步态模式检测的可调方法及恒虚警率的统计分析Fangli Yu 1 , Jianbin Zheng 1 , Lie Yu 2,3,*, Rui Zhang 1 , Hailin He 1 , Zhenbo Zhu 4 and Yuanpeng Zhang 4
1 School of Information Engineering, Wuhan University of Technology, Wuhan 430070, China; yufangli_aewa@163.com (F.Y.); zhengjb@whut.edu.cn (J.Z.); zhangr@whut.edu.cn (R.Z.); windy@whut.edu.cn (H.H.)
2 School of Electronic and Electrical Engineering, Wuhan Textile University, Hongshan District, Wuhan 430073, China
3 Hubei Key Laboratory of Biomass Fibers and Eco-dyeing amp; Finishing, Wuhan Textile University, Wuhan 430200, China
4 AirForce Early Warning Academy, Wuhan 430000, China; zzbradar@126.com (Z.Z.); zhangyuanpeng312@163.com (Y.Z.)
* Correspondence: lyu@wtu.edu.cn
Received: 28 September 2018; Accepted: 31 October 2018; Published: 3 November 2018
摘要:
本文提出了一种新的方法,通过力敏电阻(FSR)测量地面接触力(GCFs),自适应地检测实时步态模式。已发布的基于阈值的方法通过设置固定阈值来检测步态模式,以将GCF划分为地面和地面状态。然而,文献中基于阈值的方法既不是自适应方法也不是实时方法。为了克服这些缺点,本研究利用恒定误报率(CFAR)来分析GCF信号的特征。具体地说,建立一个滑动窗口检测器来记录GCF信 号曲率的持续时间,一个完整的步态周期可以分为三个区域,如连续上升区域,连续下降区域和不 稳定区域。然后,不稳定区域中的GCF值用于通过CFAR计算阈值。最后,提出了新的步态模式检测规则,其包括滑动窗口检测器的结果和通过计算的阈值的除法结果。为验证这一想法,数据采集板旨 在从健全的受试者处收集GCF数据。同时,为了测试所提方法的可靠性,引入文献中的五种基于阈值 的方法作为参考方法,并通过比较所提出的方法的检测结果与参考方法的检测结果来验证可靠性。实验结果表明,与参考方法相比,该方法可用于实时步态模式检测,自适应地检测步态模式,获得较高的可靠性。
关键词:地面接触力;力敏电阻;阈值法;恒定误检测概率法
1. 介绍
步行是人类从一个步态周期转移到另一个步态周期的基本能力,这使人们能够开始日常生活[1]. 人类行走中一个完整的步态周期包括两个主要的步态模式,例如站立阶段和摆动阶段。具体而言,定义了站立阶段当脚与地面接触时,当脚完全离开地面时定义摆动阶段[2].步态分析是量化步态模式状态的有用手段, 这可以通过包括力传感器在内的大量传感器平台来实现[3,4],惯性传感器[5–8],气压传感器[1],测斜仪传感器[9],脚踏开关[10]和肌电图(EMG)传感器[11,12].
在所有传感器平台中,力传感器平台,如力敏电阻(FSR),可以代表步态分析的黄金标准方法 [13].FSR可以安装在鞋底中以测量地面接触力(GCF)。FSR的电阻变化与人脚引起的GCF成比例。如 参考文献[1],每个步态模式具有唯一的GCF模式,使得FSR的测量值变化可以直接与步态模式相关联。
通常,力传感器平台中的步态模式的划分基于阈值方法,该阈值方法设置阈值以将GCF划分为地面和 地面状态。如Smith等人所述[14]使用FSR的80%的检测错误是由于阈值的设置,因此许多研究人员提出了计算适当阈值的方法。Mariani等人[4]将阈值定义为5%体重,方法是在实验前应测量每个受试者的体重。Lopez-Meyer等人[15]和Catalfamo等人[16]利用步态周期的最大和最小GCF来计算 阈值,这意味着GCF应在数据采集后进行后处理。但是,Lie Yu等人[17]和Jing Tang等人[18]声明参考中的方法[4,15,16]不适应不同的人和不同的步行速度。一方面,对于Mariani方法[4]不同的受试者通常具有不同的体重,因此应该针对不同的受试者计算不同的阈值。同时,无论受试者走的速度如何,在所有实验中都为同一受试者设定了一个恒定的阈值。另一方面,Lopez-Meyer方法[15]和 Catalfamo方法[16]不能用于实时步态模式检测,因为在数据后处理中获得了最大和最小GCF。因此,Lie Yu等人提出了比例法(PM),其计算了用于步态模式检测的GCF的总和和比例。在所有实验中 对所有受试者使用两个比例因子,并且该PM实现了高平均可靠性。Jing Tang等人[18]提出了自调整三阈值算法(STTTA),可以实时搜索最大和最小GCF。在所有实验中为所有受试者设定三个初始阈值, 并且将调整三个阈值以适应人类行走。然而,PM中存在明显的缺点,参考文献中的一个参数[17]由鞋和脚之间的连接决定,这将降低整个系统的检测精度。此外,参考文献中提出的STTTA [18]使用三个阈值来计算未来步行步态周期的新阈值。然而,计算公式非常简单仅依赖于当前步行步态周期中的最大和最小GCF。
在本文中,恒定误报率(CFAR)被用来分析GCF信号的特征。具体地说,建立一个滑动窗口检测器来记录GCF信号曲率的持续时间,一个完整的步态周期可以分为三个区域,如连续上升区域,连续 下降区域和不稳定区域。然后,不稳定区域中的GCF值用于通过CFAR计算阈值。最后,提出了新的步态模式检测规则,其包括滑动窗口检测器的结果和通过计算的阈值的除法结果。为了测试所提方法的 检测可靠性,先前的五种方法[4,15–18]在文献中选择参考方法来获得比较结果。
本研究的目的是开发一种自适应地检测步态模式的实时方法。 具体而言,该提出的方法与受试者的体重和步行速度无关。为了评估所提方法的可用性和可靠性,引入了五种已发表的方法作为参考。将所提方法的检测结果与参考方法进行比较。
2. 方法
2.1. 主题
本研究包括12名男性和10名女性,平均年龄23.1plusmn;3.2岁,平均体重68.2plusmn;7.6 kg,无足部疾病或 局限性病史。在实验之前,受试者给出了参与本研究的书面知情同意书,因为每个人都详细解释了目 的,并且可以确保他们的安全。这些科目选自武汉理工大学的研究生,他们批准了我们的研究。
2.2. FSR传感器的测量原理
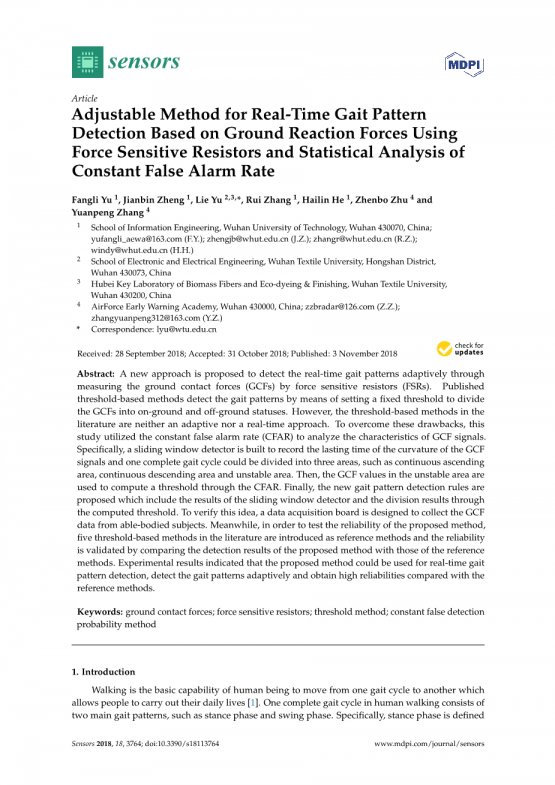
为了验证我们的研究,我们设计了一个步态相位检测系统,如图所示1.两套FSR(LOSON LSH-10, LOSON Instrumentation,Nankin,China)分别嵌入每只鞋的球和鞋跟的鞋垫中。FSR信号通过高分辨率的16位AD转换器以1000Hz的采样频率进行数字化。每个FSR具有0-200 kg的宽测量范围,具有 plusmn;0.5%满量程(FS)的高精度(包括线性和可重复性)。由于FSR传感器输出弱微电压电平信号,输出信号应放大为电压电平信号。同时,使用压力测试仪(TLS-S1000W,济南中创工业测试系统有限公司,中国济南)校准FSR,使得在0-5V范围内的放大输出信号与测得的0-200kg的质量相关。
图片1 放置在球内和后跟内的每个鞋内的FSR,数据采集板用于收集GCF信号
数据采集后,采集的FSR信号通过Butterworth低通滤波器进行滤波,截止频率为200 Hz,以消除不必要的高频噪声。
2.3. 步行实验的描述
在传感器校准之后,实施实验以测试CFAR用于步态模式检测的可靠性。然后,要求每个受试者进行5次试验以穿上所设计的鞋子步行。五次试验在跑步机上进行,每次试验30秒,指定的恒定速度为2km/h,3km/h,4km/h, 5km/h和6km/h。
2.4. 步态模式检测算法
对于人类行走,完整的步态周期可以分为两个主要阶段,例如站立阶段和摆动阶段。站立阶段意味着脚与地面接触,而摆动阶段意味着脚离开地面。由于两个FSR传感器分别安装在鞋后跟和球的内 部,因此只会有一个点(即球或脚跟)接触地面而另一个点离开地面。结果,单点接触可以导致两个 阶段之间的转换检测。具体而言,从摆动阶段到站立阶段的过渡是脚跟打击,而从站立阶段到摆动阶 段的过渡是脚跟离开。为了与两个转换不同,立场阶段被重命名为Full-Stance(即,两个点接触)。 为了区分这些步态模式,提出的算法如下所示。
2.4.1. 统计特征分析
步态模式检测主要通过设置阈值来关注地面和地面状态的划分。因此,本文对两种状态进行了特 征分析。首先,设置虚拟阈值以将GCF划分为地面和地面状态。数字2a演示了完整步态周期中虚拟阈 值的划分。该完整周期中的最大值将区分为地面状态的GCF分为两个区间,包括[AB]和[BC],如图2a. 数字2b描绘了GCF的差异。参考[AB]区间的曲率基本上是正的,持续时间很长。同时,参考[BC]区间 的曲率主要是负的,也持续很长时间。然而,参考[CD]间隔中的曲率极性(即,正或负)是不稳定的, 并且短时间内确定的曲率极性将改变。
图2(a)使用虚拟阈值将GCF划分为地面和地面状态
(b)差分GCF用于识别参考文献[AB],[BC]和[CD]
基于这些原因,可以构建滑动窗口检测器以记录GCF信号曲率的持续时间。给出两种类型的滑动 窗口,例如上升窗口和下降窗口,可以描述为
其中Aw是上升窗函数,NA是Aw的大小。同时,Dw 是下降窗函数,ND 是Dw的大小。
当GCF信号的当前点(即,标记为F)到来时,计算其导数并记为dF。当dF值为正时,上升窗口将滑动,但下降窗口保持不变,可写为
另一方面,当dF值为负时,下降窗口将滑动,但上升窗口保持不变。
然后,计算两个窗口中的“1”的数量,它们分别标记为Ca 和 Cd.Ca 是升序窗口中的“1”的数字,而Cd 是用于下降的窗口。
最后,分别为Ca 和Cd设定计数限制La 和Ld 。当Ca (或Cd)大于La (或Ld)时,可以认为曲率持续 很长时间。另外,当Ca 小于La 并且Cd 小于Ld时,可以认为曲率持续很短的时间。当为这些参数选择适 当的值时,可以在图中处理GCF信号3.但是,[A#39;B#39;]和[B#39;C#39;]间隔不能视为地面状态。结果,这种统计特征分析将导致错误检测,从而应该进行进一步的研究。
图3.滑动窗口检测器将GCF分为三个部分
2.4.2. 恒虚警率和门限计算
对于所有相关研究,设定阈值更接近于作为地面状态区分的GCF。因此,应在使用滑动窗口检测 器搜索[C#39;D#39;]间隔之后进行阈值计算。点D#39;处的GCF值与计算的阈值之间的误差将导致错误检测。结 果,CFAR用于弥补这一缺点。
假设H0 是GCF的检测结果,被确定为真实的离地状态和H1 GCF的检测结果被确定为真实的地面状态。同时,D0代表了GCF被检测为离地状态,而D1 表示GCF被检测为地面状态。在本文中,阈值是基于[C#39;D#39;]区间的分析计 算的,该区间可以区分为离地状态。因此,将通过计算的阈值获得的除法结果检测为地面状态,而真 实的检测结果是地面状态。然后,在这种情况下的错误检测概率可以表示为
其中Pf 是错误检测概率,P(D1| H0)是判断H0 为D1的概率。同时,x是[C#39;D#39;]区间内发生的GCF,T是 检测阈值,P(x | H0)是概率密度函数。
如图所示4,[C#39;D#39;]区间中未过滤的x受正态分布的影响。 但是,滤波后的x遵循Rayleigh分布,如图所示5.因此,P(x | H0)可以描述为
其中sigma;是x的信号密度。将等式(5)代入等式(4),可以将错误检测概率重写为
然后,可以在下面获得检测阈值T。
当通过滑动窗口检测器搜索[C#39;D#39;]间隔时,将立即在点D处计算检测阈值。在瑞利分布中,sigma;与x 的平均值成比例,可表示为
其中x是参考[C#39;D#39;]区间中x的平均值。将D#39;点后的GCF值与检测阈值T进行比较,以将GCF分成地面和 地面状态。如图所示6,[A“B”]和[B“C”]分别是下一个步态周期的连续上升和下降区域。同时,A和D 是相同的点。在点A(或D#39;)中,根据等式(7)计算阈值。然后,可以进行状态划分,其可以如下陈述。
其中F是D#39;(或A)点后的GCF。对于S,“1”表示地面状态,“0”表示地面状态。如图所示6,该计算出 的阈值将下一个步态周期除以得到两个交叉点E#39;和F#39;的结果。基于等式(9)中的除法公式,[A“E”] 和[F#39;C“]间隔都被判断为离地状态。然而,Pf 值将根据等式(7)影响阈值,其可以在图中精确

