
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
预测肩胛运动学的机器学习算法
Kristen F. Nicholson, R.Tyler Richardson, Elizabeth A. Rapp van Roden, R. Garry Quinton, Kert F. Anzilotti, James G. Richards
摘要:本研究的目的是开发和验证一种非侵入性方法来估计个别患者的肩胛运动学。我们假设机器学习算法可以用运动捕捉数据,根据测量的肱骨方位和肩峰突位置准确估计动态肩胛骨方向。利用二维到三维透视/模型匹配过程,以双平面荧光镜的黄金标准来评估算法的准确性,建立了9例健康成人肩关节的个体化神经网络。将这些模型用于肩胛胸廓运动学的预测,并将预测的运动学与双平面透视法得到的运动学进行比较,以确定机器学习算法的准确性。结果表明,预测运动学与验证运动学之间存在相关性,估计运动学与验证运动学误差在10度以内。我们的结论是,个性化机器学习算法有望提供精确的、无创的肩胛胸廓运动学测量。
关键词:肩部力学;机器学习;神经网络;生物力学
- 研究简介
肩关节是一个复杂的系统,由多个关节组成:肩关节、胸锁关节、肩锁关节和肩胛胸关节。为了更好地理解和治疗肩关节病变,需要精确测量整个肩关节复合体。然而,ST运动学的精确测量是具有挑战性的。肩胛与皮肤表面相对独立的运动使肩胛运动的测量复杂化。以往关于肩关节运动学的研究,一般只描述肱骨相对于胸骨的方向,忽略了肩胛骨作为中间结构[1]的重要作用。肩胛运动异常是肩关节临床病理的重要因素,获得肩胛运动异常的临床测量手段具有重要的意义[2-5]。增进对健康和病理关节动态活动中肩胛运动学和肩关节运动的理解,将有助于肩关节损伤和病理的治疗和康复[6]。
尽管需要精确的肩胛运动学,但一种可用于所有患者和所有运动的临床测量技术尚未开发出来。目前用于测量肩胛骨方向的技术,要么对特定人群不准确,具有侵入性,耗时,限于静态位置,需要昂贵的设备,要么没有对所有运动进行验证,从而降低了其临床效用[7-13]。
肩胛骨的运动受两个约束条件控制:附着在锁骨上和由胸腔形成的接触面。由于胸腔的表面是非平面的,肩胛骨可以通过诸如仰角等位移间接改变方向,也可以通过将肩胛骨固定在躯干上的肌肉的活动直接改变方向。肩胛骨的主要功能是作为支撑肱骨的基础,因此肩胛骨的方向与肱骨的方向有关。因此,了解可测量的位移标志的位置,如肩峰突(AP),结合肱骨的方向测量,可能足以估计肩胛骨的实际方向。肩胛骨和胸腔之间的接触面可能因个体而异,这些变化在病理上可能被夸大。此外,这些病理可能对肩关节功能有深刻的不同影响。因此,以往的统计方法估计肩胛骨方向的基础上的群体措施是没有价值的,当检查一个单独的病人。本研究采用传统的运动捕捉技术,开发个性化的机器学习算法估计每个个体的肩胛运动学。本文所描述的方法利用肩胛位移和肱骨方向的静态测量来开发算法,为个体提供可靠和准确的肩胛位置测量。期望这些算法能应用于动态运动捕捉测量,提供肩胛运动的估计。
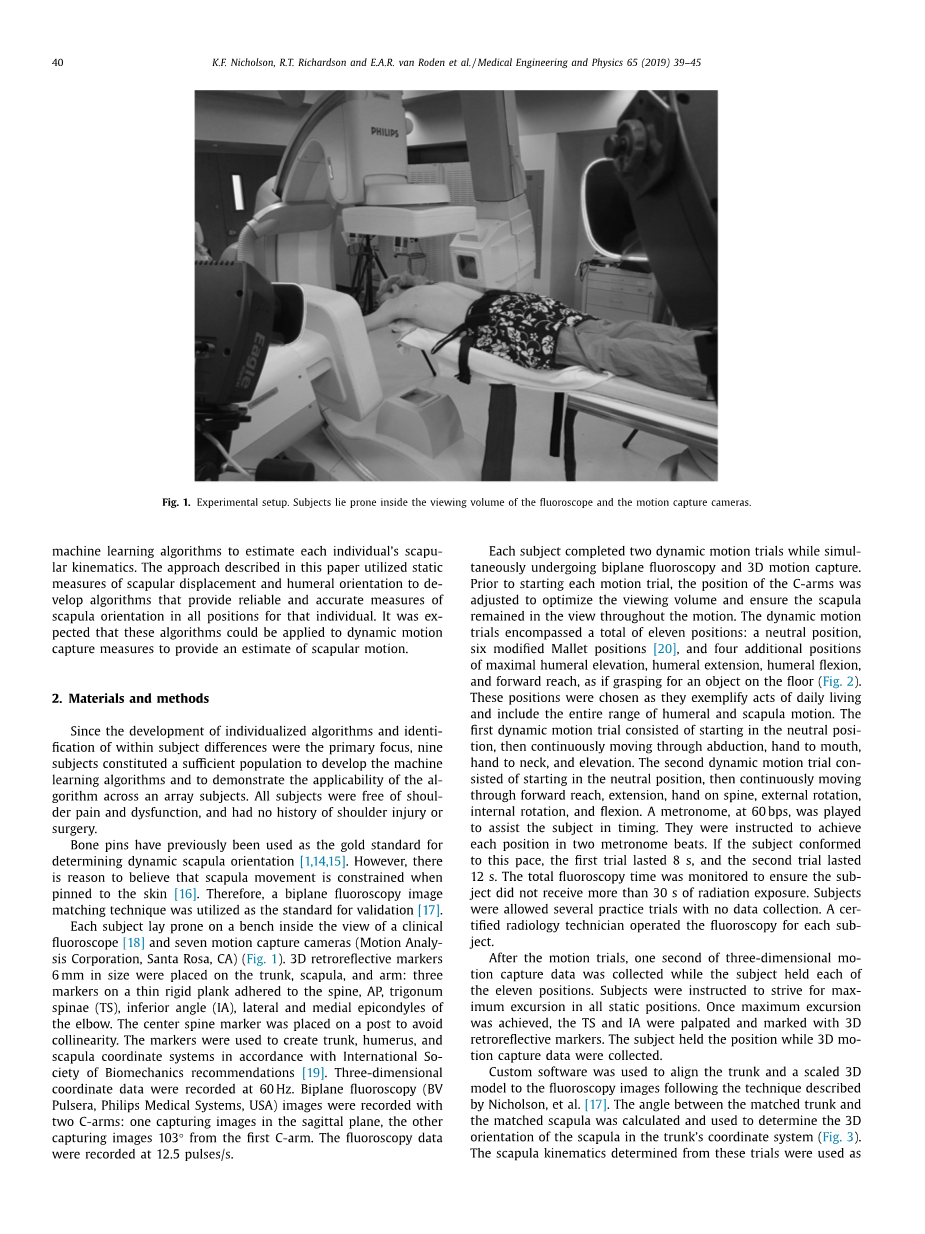
图1 受试者俯卧在透视镜和运动捕捉相机的可视范围内
- 研究材料和方法
由于发展个体化算法和识别受试者内部的差异是主要的重点,因此9个受试者构成了足够的群体来发展机器学习算法,并证明该算法在受试组中的适用性。所有受试者均无肩痛和功能障碍,无肩外伤或手术史。
骨针曾被用作测定肩胛骨动态定位的黄金标准[1,14,15]。然而,我们有理由相信,当肩胛骨固定在皮肤[16]上时,其运动受到限制。因此,采用双平面荧光图像匹配技术作为验证[17]的标准。
每个受试者俯卧在临床荧光镜[18]和七个动作捕捉相机(Motion Analys Corporation,Santa Rosa,CA)的视野内的长凳上(图1)。将尺寸为6mm的3D逆向反射标记物放置在躯干,肩胛骨和手臂上:在粘附于脊柱,AP,三角肌(TS),下角(IA),外侧和内侧上髁的薄的刚性板上的三个标记物。弯头。将中心脊柱标记放置在柱上以避免共线性。根据国际生物力学组织的建议[19],这些标记用于创建躯干,肱骨和肩胛骨坐标系。以60Hz记录三维坐标数据。用两个C臂记录双平面荧光透视(BV Pulsera,Philips Medical Systems,USA)图像:一个在矢状平面中捕获图像,另一个从第一个C臂捕获图像103。以12.5脉冲/秒记录透视数据。
每个受试者完成两次动态运动试验,同时进行双平面透视和3D动作捕捉。在开始每个运动试验之前,调整C形臂的位置以优化观察体积并确保在整个运动过程中肩胛骨保持在视野中。动态运动试验包括总共11个位置:中立位置,六个修改的槌位置[20],以及最大肱骨高度,肱骨伸展,肱骨屈曲和向前伸展的四个额外位置,就好像抓住地板上的物体一样(图2)。这些位置被选为他们的日常生活行为例证,包括整个范围的肱骨和肩胛运动。第一个动态运动试验包括从中立位置开始,然后通过外展、手对嘴、手对脖子和仰卧起坐持续运动。第二次动态运动试验从中立位开始,然后通过前伸、伸展、手按脊柱、外旋、内旋、屈曲等动作持续进行。一个60个基点的节拍器被用来帮助受试者计时。他们被要求在两个节拍器中完成每个位置。如果受试者符合这个速度,第一个试验持续8秒,第二个试验持续12秒。总透视时间被监测,以确保受试者不接受超过30秒的辐射照射。受试者被允许在没有数据收集的情况下进行几次实践试验。每位受试者均由一名合格的放射技师进行透视。
图2 运动测试包括11个姿势。一个中立的位置,六个修改过的木槌位置,仰角,伸展,弯曲,和向前延伸
运动实验结束后,在受试者保持11个姿势的同时,收集1秒的三维运动捕捉数据。实验对象被要求在所有静态位置上都力争最大限度的偏移。一旦达到最大偏移量,触诊TS和IA并用3D反反射标记。在采集三维运动捕捉数据时,受试者保持姿势。
根据Nicholson等人描述的技术,使用定制软件将主干和缩放的3D模型与荧光图像对齐。计算出的匹配躯干和匹配肩胛骨之间的角度被用来确定躯干坐标系中肩胛骨的三维取向(图3)。肩胛骨运动学决定从这些试验中被用作验证由运动捕捉数据创建的机器学习算法的标准。
图3 最上面的两张图像显示了两张双平面透视图像。第二行是一个将3D三元组与图像匹配以获得主干方向的示例。第三行是将三维肩胛骨模型与图像进行匹配以获得肩胛骨方向的例子。
算法开发基于肩胛骨定向是肱骨定向和肩峰过程位移的函数的原理。对于任何给定的肱骨定位和AP位移,无论用于到达该位置的运动路径如何,预期肩胛骨定向都是一致的。使用来自11个静态位置的数据为每个受试者创建数学算法。使用每个静态位置的所有60帧数据,创建660点输入数据集。肱骨定向和AP位移是算法输入。肱骨定向计算为胸主动脉螺旋角,即躯干和肱骨之间的螺旋角,AP位移计算为AP标记沿Y轴(下/上)和X轴(前/后)的位移。后)。由于AP附着在锁骨上,因此沿Z轴的位移预计可以忽略不计,并且不用作算法开发的输入。预测值是肩胛骨取向,计算为ST螺旋角的X,Y和Z分量,即躯干和肩胛骨之间的螺旋角。算法是使用人工神经网络开发的。
人工神经网络是受大脑中生物神经网络启发而产生的统计机器学习算法。它们目前被用作分析、预测、控制、识别和/或数据处理的工具。人工神经网络由神经元层组成。典型的网络具有输入神经元层、隐藏神经元层和输出神经元层。人工神经网络具有自适应特性,使其具有学习和模式识别的能力。得到的网络可以从输入计算值,类似于多元线性回归算法,但是输入和输出之间的关系不一定是线性的。人工神经网络可分为类型、结构和学习算法。在本研究中,我们使用了一个前馈、反向传播的人工神经网络程序(aNETka 2.0版,由英国加的夫大学沃夫森磁学中心的Stan Zurek创建)来为每个单独的ST X分量、ST Y分量和ST Z分量创建预测网络。隐层中的每个神经元收集与权重矩阵相乘的输入值,并用一个激活函数对其进行处理(图4)。
将源自神经网络的算法应用于从动态试验期间收集的运动捕获数据获得的AP位移和肱骨定向测量。 使用线性插值算法将得到的ST角度内插到每秒300帧。 提取每24个角度,因此算法确定ST角度与荧光镜收集的每秒12.5帧对齐。 然后将所得子集的每个第四角度与将3D模型匹配到每个第四荧光透视帧所获得的角度进行比较。 通过比较从算法得到的肩胛骨定向估计值和使用验证标准测量的相应肩胛骨定向,可以直接评估与估计值相关的误差。
通过相关性和绝对平均差异确定每个神经网络的准确性。 根据埃文斯评估相关的强度(0.00 0.19:非常弱,0.20 0.39:弱,0.40 0.59:中等,0.60 0.79:强,0.80 1.0:非常强)[21]。 如果算法的估计ST角度与透视确定的ST角度之间的绝对平均差异在每个轴周围小于10度,则认为算法在临床上是准确的。
图4 表现最好的神经网络配置有一个包含11个神经元的隐含层,使用sigmoid/logistic激活函数,学习率为0.1。STx、STy和STz都有自己的神经网络
- 研究结果
研究了前馈-反向传播神经网络的几种结构。用户定义的选项包括层数、每层神经元数、激活函数(线性、sigmoid/logistic或双曲正切)、学习率、最大迭代次数、停止标准(可接受的RMSE)以及训练与测试点的数量。表现最好的网络配置有一个包含11个神经元的隐含层,使用sigmoid/logistic激活函数,学习率为0.1。将每个网络的输入数据分为训练用例和测试用例,其中90%的数据点作为训练用例,10%作为测试用例。当满足三个条件之一时完成网络训练:完成最大迭代次数(10000次),满足停止准则(RMSE为1),或者训练误差减小,测试误差增大。这里给出的结果来自上面描述的神经网络配置。
表1给出了神经网络估计值与荧光定位的相关系数。平均来看,ST X相关性很强,ST Z相关性很强(r = 0.85, r = 0.78), ST Y相关性较弱(r = 0.32)。表2为神经网络估计ST角与荧光法确定ST角的绝对均值差值。虽然所有受试者的X、Y和Z的平均绝对平均值差异小于10度,但有几个受试者的绝对平均值差异大于10度。
表1 透视确定的肩胛骨胸骨角与神经网络估计的肩胛骨胸骨角之间的相关系数
|
透视与神经网络的关系 |
|||
|
ST X |
ST Y |
ST Z |
|
|
1 |
0.91 |
0.49 |
0.91 |
|
2 |
0.89 |
0.64 |
0.59 |
|
3 |
0.86 |
-0.33 |
0.91 |
|
4 |
0.78 |
0.26 |
0.77 |
|
5 |
0.90 |
0.55 |
0.86 |
|
6 |
0.86 |
0.59 |
0.46 |
|
7 |
0.75 |
0.13 |
0.87 |
|
8 |
0.88 |
0.17 |
0.69 |
|
9 |
0.85 |
0.41 |
0.94 |
|
平均 |
0.85 |
0.32 |
0.78 |
0.00 0.19:非常弱,0.20 0.39:非常弱,0.40 0.59:中等,0.60 0.79:非常强,0.80 1.0:非常强。ST= Scapulothoracic
表2 透视确定的肩胛骨胸骨角与神经网络估计的肩胛骨胸骨角的绝对平均差值
|
透视与神经网络绝对平均差(度) |
|||
|
ST X |
ST Y |
ST Z |
|
|
1 |
7.87 |
6.87 |
5.56 |
|
2 |
7. 全文共12440字,剩余内容已隐藏,支付完成后下载完整资料 资料编号:[3026] |
||

