
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
基于微电机系统的动态定位船舶惯性导航:航迹推算
罗伯特·H·罗涅*托莱夫·H·布莱恩*托尔·I·福森*拖·约翰森
*挪威科技大学工程控制论系,挪威特隆赫姆7491(电子邮件robert.rogne@itk.ntnu.no,torleiv.h.bryne@itk.ntnu.no,
thor.fossen@ntnu.no,tor.arne.johansen@itk.ntnu.no).
摘要:如果航向和位置参考无法实现或丢失,航迹推算功能对于船舶导航至关重要。在对安全至关重要的海航作业(例如动态定位)中,国际海事组织和船级社要求船舶微电机惯性测量单元,对航迹推算能离进行了全面的实验验证和比较。在北海一艘附近海船船舶进行动态定位操作中,在陀螺罗经和位置参考系统的辅助下,利用两个非线性观测器实现了全面的实验验证。十分钟后评估航迹推算性能,而无助于位置参考系统的测量。
2016, IFAC(国际自动控制联合会),由Elsevier Ltd托管。保留所有权利。
关键词:惯性导航;导航系统;位置估计;航迹推算;非线性观察者;惯性测量。
- 介绍
航迹推算(DR)术语在导航社区中用于描述通过跟踪所覆盖的距离和行进方向来估计相对于某个出发点的位置的过程。DR作为表达式的起源尚不清楚,但一种可能性是它源自推算,推算的缩写Misra和Enge(2011.ch.1)。惯性导航系统(INS)通过基于角速度测量值和及速度计读数分别一次和两次的积分从先前已知的转台推导出位置,速度和姿态(PVA)。从而基于DR。由于惯性传感器中的误差(例如噪声和偏差),航迹推算不足以随时间保持准确的估计。为了应对INS随时间的漂移,引入了辅助功能。辅助INS通常背称为继承导航系统。
INS可以通过许多传感器和位置参考(PosRef)系统来辅助,例如无线电,激光,水声和基于卫星的系统。后者具有受益于全球范围的优势,被称为全球导航卫星系统(GNSS)。但是,这写系统会遭受自然退化和故意中断的影响。自然退化可能是由于附近物体反射引起的信号失真(称为多径),太阳风暴造成的信号损失或卫星的视线的损失引起的。故意中断的原因可能是信号干扰。在失去参考的过程中,良好的灾难恢复能离对于INS向目标设备提供准确的PVA估算对于用户至关重要。使用非线性观测器(NLO)的辅助INS的最新工作,例如Hua(2010),Grip等。(2013),bryne等人。(2014;2015),Grip等人(2015),以及Ronge等(2016),尚未讨论使用此类观察者设计的灾难恢复功能。Fusini等人是一个例外。(2016 ),但是这个结果使用视觉辅助的继承导航系统来改善航迹推算兵提供速度辅助,这又被用来改善DR的能力。对海洋水面船舶,特别是在动态定位(DP)中,由于船级社要求提供了多个航向参考,例如DNV GL(2011),而是使用INU和NLO的DR功能在船舶导航中得不到应有的帮助。
入将近20年前在工业环境中所提出的,的DP中应用继承导航系统远非新颖(Vickey,1999)。在随后的几年中,其他类型的产品被推向市场,Faugstandmo和Jscobsen(2003)和Paturel(2004)。所有这些产品都是基于环形激光陀螺(RLG)或光纤陀螺(FOG)技术开发的高端IMU。此外,在将这些产品用作DP估计器中的Posrsf信号,其中Faugstandmo和Jscobsen(2003)的集成INS解决方案仅与水声位置参考(HPR)系统连接。此外,其中一些INS长聘也受到出口限制,限制了市场潜力,并且由于安装前可能徐娅萍很长的审批过程,因此增加了安装成本。
尽管安装成本非常高,但近年来,DP中的INS集成 在业界受到了相当大的关注,Stephens等人。 (2008年),卡特(2011年; 2014年),罗素 (2012年)和威勒姆森与哈尔斯(2013年)。从 后者可以说,出口限制很少有问题,因为“声学 系统由相同的规则所涵盖”。但是,该声明不适 用于不受此类限制的GNSS技术。此外,当前市场 上存在许多不受出口许可证约束的基于MEMS的IMU。 这种装置具有很大的潜力,可用于海上和海上标 记。因此,对用于船舶导航的,使用高速MEMS IMU的GNSS辅助INS的DR功能的研究引起了极大的兴趣。
1.1主要贡献
本文介绍了使用基于高速率的GNSS辅助INS获得的 DP中的DR功能的初步研究
MEMS IMU。进行研究:
bull; 基于两个NLO设计,Mahony等人。(2008)和 Rogne等。(2016),分别与
平移运动观测器(TMO)。
使用两种类型的MEMS IMU。
在位置和方向上评估灾难恢复功能。
对于使用NLO和高速率MEMS IMU进行姿态确定的研 究,Bryne等人。(2016)是可以建议的。
- 初步设计
2.1表示法
欧几里得向量范数表示为2。nn单位矩阵表示为In,而向量或矩阵的转置则表示为(·)
T。坐标系 用{·}表示。S(·)isin;SS(3)表示偏度对称矩阵使得S(z1)z2= z1times;z2 向量z1,z2isin;R3。另外,zaisin;R3表示a;向量z,相对于{c}帧{c},在{a}中分解。此外otimes;sa表示哈密顿四元数乘积。饱和度由sat表示,其中下标*表示饱和度极限。 旋转矩阵描述两个之间的旋转
给定帧{a}和{b},并表示为Rbisin;SO(3)。qba= (s, r) sisin;R是四元数和risin;R3是矢量部分。
滚动,俯仰和偏航分别表示为phi;,theta;和psi;。
2.2坐标参考系
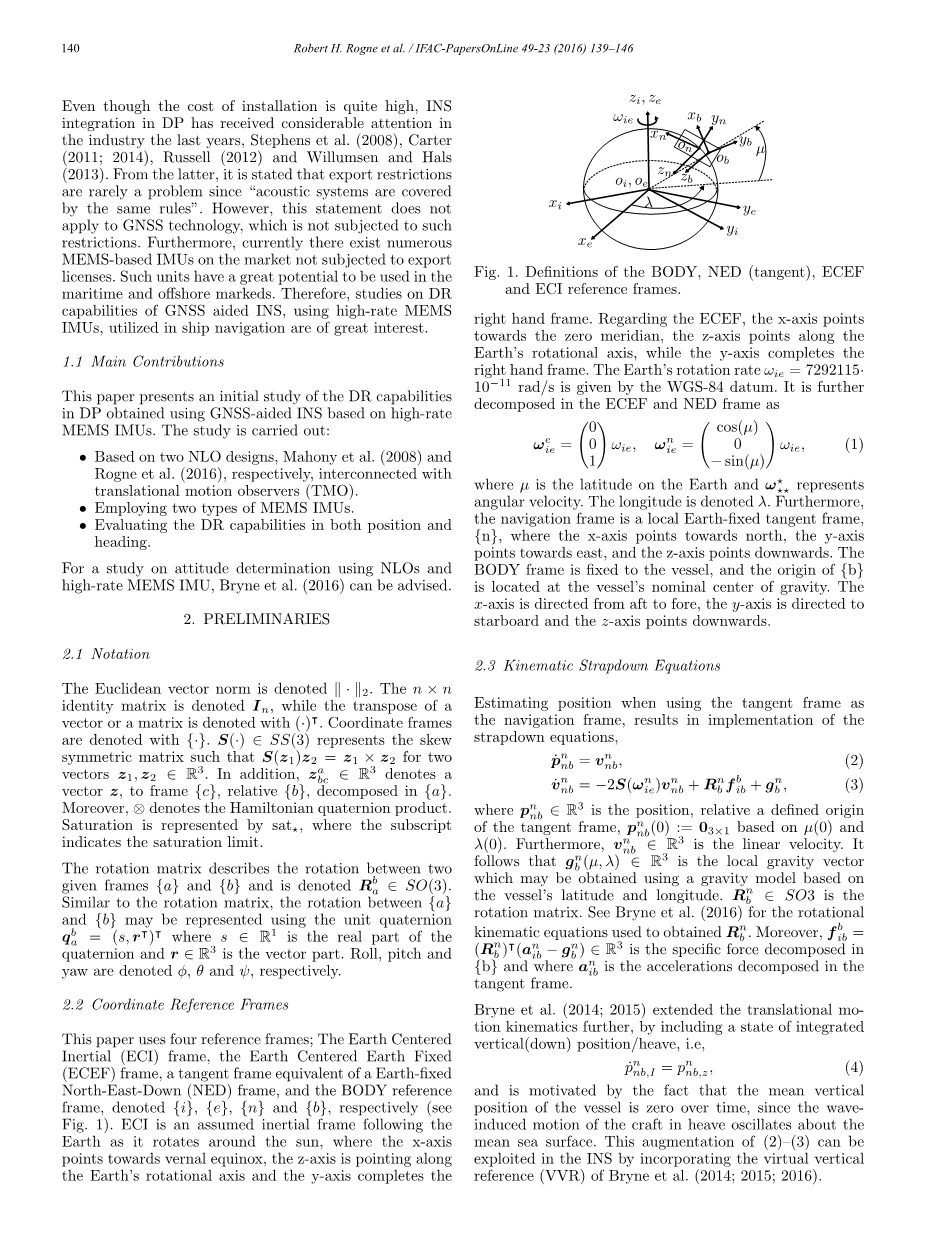
本文使用四个参考系。以地球为中心惯性(ECI)框架,以地球为中心的地球固定 (ECEF)框架,等效于固定地球的切线框架 东北(NED)框架和BODY参考框架,分别表示为i, e,n和b(见图1)。ECI是地球绕太阳旋转时跟随 地球的一个假定惯性坐标系,其中x轴指向春天的 春分点,z轴指向地球的旋转轴,而y轴完成地球的旋转。
图1. BODY,NED(切线),ECEF和ECI参考系的定义。 右手框架。关于ECEF,x轴指向零子午线,z轴指 向地球的旋转轴,而y轴则完成右手框架。地球的 旋转速度omega;即= 7292115 10minus;11 rad / s由WGS-84基 准给出。更进一步 在ECEF和NED框架中分解为
(1)
其中micro;是地球上的纬度,而*表示 角速度。经度表示为lambda;。此外, 导航框是本地固定于球的切线框n,其中x轴指 向北方,y轴指向东方,z轴指向下方。身体框架 固定在船上,b的原点位于船的标称重心处。x轴从后到前,y轴指向右舷,z轴指向下方。
2.3运动捷联方程
使用切线框架作为导航框架时估计位置会导致捷 联方程的实现,
(2)
(3)
其中是相对于定义原点的位置 的正切框架基于mu;(0)和
表示饱和度极限。 lambda;(0).此外是局部重力矢量是局部重力矢量 其可以使用重力模型获得,该重力模型基于 船只的纬度和经度。是 旋转矩阵。见布莱恩等人(2016) 或者旋转用于获得的运动学方程此外 特定的力分解成 {b}和下落是在中分解的加速度 切线框架。
见布莱恩等人(2014; 2015) 通过包含集成的状态,进一步扩展了平移运动运动学 垂直(向下)位置/升沉,即,
(4)
这是因为平均垂直 随着时间的推移,船只的位置是零,因为船只在升沉中的waveinduced运动围绕着 平均海面。(2)-(3)的增加可以是 在惯性导航系统中利用虚拟垂直 Bryne等人的参考文献(VVR)(2014年;2015年;2016年)。
3.惯性测量单元和船用传感器配置
3.1 惯性测量单元和错误源
捷联惯性测量单元是测量三轴的传感器单元 单位的角速度和三轴比力 相对于惯性框架的主干框架,
,,
其中下标x、y和z表示向前, 主干框架中的右舷轴和向下轴。除了特定的力和角速度,每个 测量被传感器偏差、误差 和噪音。传感器误差可能包括非线性、标度 因素、交叉耦合和g灵敏度误差,其中 后一种误差只影响角速度传感器读数.除了内部噪声源,外部噪声 可能是由于例如电和磁干扰,或者 源于振动形式的机械源。在 本文假设误差源与传感器有关 非线性、比例因子、交叉耦合和g灵敏度 由制造商在校准中补偿, 或者其他方面都是可以忽略的。传感器偏差也可以是 由制造商校准,但是某些时变偏置不稳定性和运行不稳定性通常 与微电子机械系统集成模块一起展示。因此,我们将角速度和加速度计测量值建模为
(5)
(6)
其中和是真实的角速度和具体的力。此外,相应的传感器 偏差表示为和,而和代表传感器噪声和振动引起的噪声 包含在各自的测量中。假设角速率/速率陀螺仪和加速度计都存在偏差常数,
(7)
3.2船舶传感器配置
几个惯性测量组合安装在一艘近海船只上,在北海作业,配备一辆劳斯莱斯船用动力定位系统。这艘船是我们的 由法尔斯塔德航运公司经营。在本文中,我们将介绍使用一个STIM300和一个ADIS16485获得的结果。辅助中使用的传感器配置捷联惯导系统,基于运动学公式布莱恩等人(2016年,eq .(3))、(2)–( 3)、(4)用于融合惯性测量单元,罗盘、全球导航卫星系统和VVR测量:
bull; 1x 差分全球导航卫星系统位置参考测量,
在1赫兹
bull; VVR:对于所有t在大于等于0到1000赫兹范围内。通过使用VVR,基于测距的其他垂直参考,由于垂直测距几何形状而导致的精度降低,例如基于全球导航卫星系统和基于水声的定位参考系统。有关的更多详细信息 VVR测量原理,见布莱恩等人(2015)。
bull; 2x惯性测量单元(ADIS16485和STIM300),提供
bull;三轴角速度测量,
bull;基于三轴加速度计的特定力测量,
表1惯性测量单元规格
|
ADIS16485 |
STIM300 |
|
|
运行中陀螺速率偏差稳定性 |
|
|
|
角随机浮动 |
|
|
|
运行中的加速度计偏置稳定性 |
0.032mg |
0.05mg |
|
速度随机浮动 |
|
|
表2非线性观测器参考向量配置
|
矢量 |
矢量 |
|
|
非线性观测器A |
单位矢量北 |
|
|
非线性观测器C |
单位矢量北 |
通过来自VVR的反馈和虚拟速度注入 |
两者都连接在1000赫兹上。
bull; 3x来自陀螺罗盘的偏航测量,在五赫兹。
海上安装的惯性测量组件的规格 血管显示在表1中。
4.非线性观测器
在本文中,我们使用两个非线性观测器,每个都与一个TMO使用这两个评估灾难恢复能力 微机电惯性测量系统。正在讨论的无法律约束力文书是观察员 Mahony等人(2008年)和罗格尼等人(2016年),其中 后者基于Mahony等人的结果。 (2008年),Grip等人(2012年;2013年)和Bryne等人(2014年; 2015年)。在本文中,对于非线性观测器A我们将参考Mahony等人(2008) 对于非线性观测器C和罗格尼等人(2016年)NLO 同时使用交流电和交流电的姿态确定性能 Bryne等人(2016年)中进行了评估,因此类似这里选择命名惯例。概述用于估计的模块化非线性观测器结构聚乙烯醇如图2所示,适用于非线性观测器A和C但是在A对于TMO没有帮助。主要区别对于非线性观测器A和C之间的关系都在表2概述出来了、详情见布莱恩等人. (2016)。这两个非线性观测器是基于相同的观察者方程,
其中,Proj表示Grip等人(2012年)的角速度偏差投影算法及其参考,以及是与角速度偏差估计相匹配的增益。非线性观测器A和C之间的差异,见表2插入项中,,给出为
, (9)
取决于所讨论的观测器设置,其中j isin; [A,C],
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[241400],资料为PDF文档或Word文档,PDF文档可免费转换为Word

