
英语原文共 7 页
鱼尾形自主水下航行器(AUV)稳性和操纵性的数值分析
G. da Silva Costa, A. Ruiz, M.A. Reis, A.T. da Cunha Lima,
M.P. de Almeida, I.C. da Cunha Lima
摘要: 本文旨在通过仿真模拟海水作用在船体上的阻力、升力和力矩,来研究自主水下航行器(AUV)的稳性和操纵性。这些是在远程操控不可行时的深水条件下的重要问题。本文基于三种不同鱼尾形状的船尾行为,考虑了几个攻角,利用由C 语言编写基于有限体积法(FVM)的开源软件OpenFOAM计算了N-S方程。最后在计算平均阻力、升力和力矩的基础上,分析了鱼尾形状对阻力和稳性的影响,并对力矩的傅里叶变换进行滤波,讨论了每种情况下的操纵性。
关键词:稳性 操纵性 AUV CFD OpenFOAM
介绍
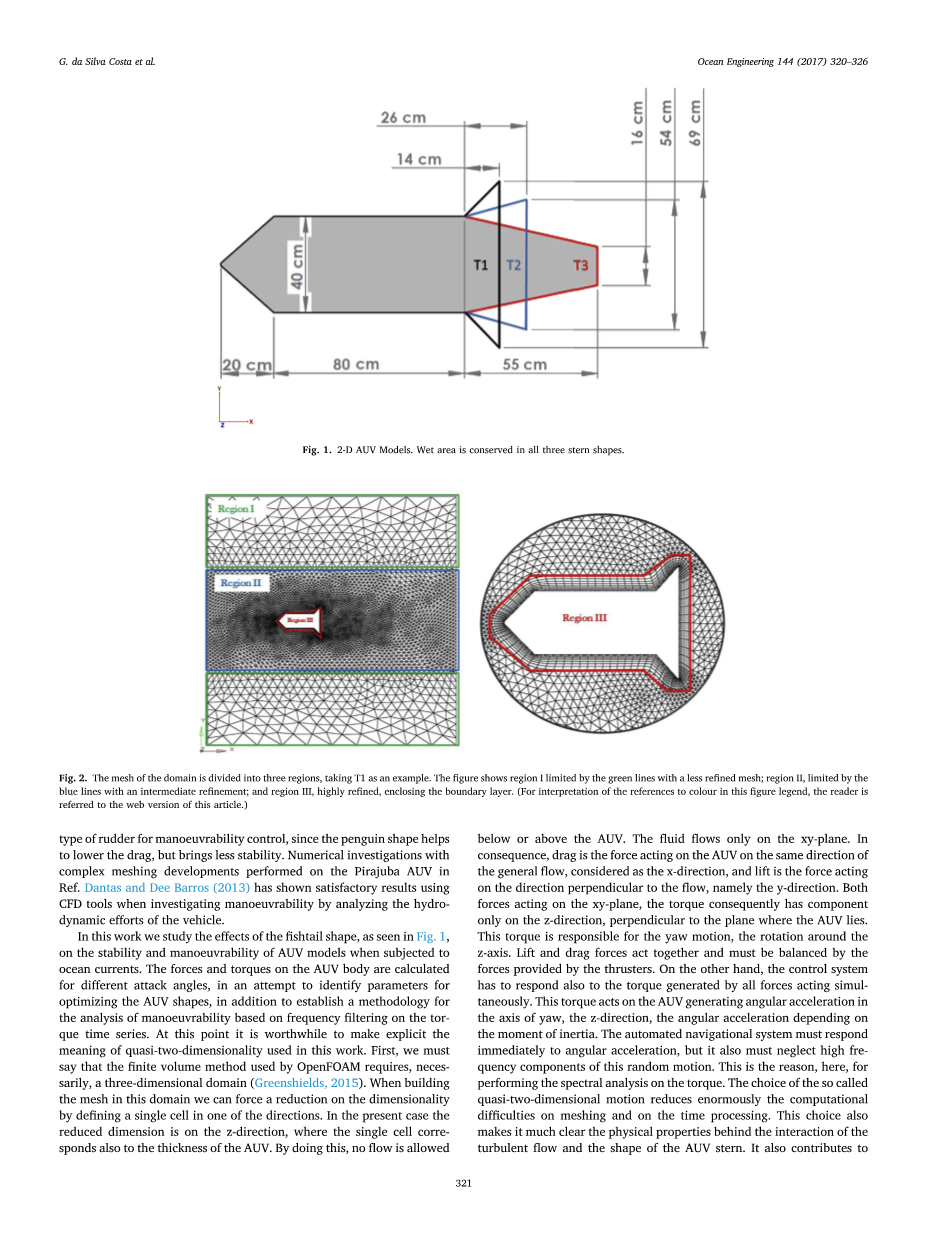
高性能计算的发展带来了用数值方法求解高难度微分方程的可能性,也带来了在相对较短的时间内需要较高处理能力的广泛问题。研究流体流动产生的力和力矩如何作用在自主水下航行器(AUV)上,是一个由N-S方程控制的湍流状态下的动力学问题(Schlichting and Gersten,2003)。本文的目的是了解船尾形状如何影响其稳定性和机动性,同时考虑到船尾的旋涡与AUV船体产生的湍流尾流的相互作用,并对不同的攻角进行了分析。我们对航行器采用了准二维模型,尾部采用鱼尾形状,如图1所示。我们研究了鱼尾形状的渐进式变化对流体作用在AUV船体上的力和力矩的影响,并在三种形状的计算中都保留了湿表面积。本文选择的准二维模型提供了一种更简单的方法来理解这些力和力矩的影响,同时也使得计算速度更快,也更容易处理。
图1 二维AUV模型。三种形状下的湿表面积相等
在近期研究中,(Seo等,2008;曹等,2014;吴等,2014)[1]探索利用CFD(计算流体动力学)工具分析水下航行器和其他水下结构的流体动力学成分。本课题在OpenFOAM平台上进行CFD计算。OpenFOAM平台已广泛应用于水下航行器的动力学评估。OpenFOAM是一款用C 语言编写使用有限体积法(FVM)求解微分方程的开源软件(Versteeg and Malalasekera, 2007;弗莱彻,2006) [2]。选择OpenFOAM是基于它与CFD中的多个平台交互的充分可能性、它对求解器定制的通用性以及它是开源和免费的。此外,还对受洋流影响的AUV模型进行了其他计算。Ref. Seo等人 (2008) [3]重点研究了是运动的纵摇程度,这是水下滑翔机的原始特性。在文献Mansoorzadeh和Javanmard(2014)中,除了实验步骤外,还对阻力和升力系数与相对沉没深度进行了评估。结合Chakrabarti等人(2014) [4]的实验和分析结果,强调了企鹅形状在减阻中的重要性,以及现代舵对操纵性控制的必要性,因为企鹅形状虽然有助于降低阻力,但稳定性较差。参考文献Dantas和Dee Barros(2013) [5]对Pirajuba AUV进行了复杂网格化发展的数值研究,通过分析航行器的水动力特性,利用CFD工具研究了飞行器的操纵性,取得了令人满意的结果。
我们研究了鱼尾形状(如图1所示)对AUV模型在洋流作用下的稳定性和操纵性的影响。计算了不同攻角下AUV船体的力和力矩,试图确定优化AUV外形的参数,并建立了基于力矩时间序列频率滤波的操纵性分析方法。在这一点上,有必要明确在项研究中使用的准二维的含义。首先,我们必须知道OpenFOAM使用的有限体积法需要一个三维域(Greenshields, 2015)。当在这个域中构建网格时,我们可以通过在一个方向上定义一个单元格来强制降低维数。在本例中,降维是在z方向上,其中单个单元也对应于AUV的厚度。这样做,水流就不会被允许低于或高于AUV,只会在xy平面上流动。因此,阻力是作用在AUV上与一般水流方向相同的力,即x方向;升力是作用在垂直于水流方向上的力,即y方向。这两个力都作用在xy平面上,所以力矩只在z方向上有分量,垂直于AUV所在的平面。这个力矩导致首摇运动,绕z轴旋转,而升力和阻力共同作用,必须由推进器提供的力来平衡。另一方面,控制系统还必须对所有同时作用的力所产生的力矩作出响应。这个力矩作用在AUV上,在首摇轴z方向产生角加速度,角加速度取决于惯性矩。自动导航系统必须对角加速度立即作出反应,但也必须忽略这种随机运动的高频分量,这就是对力矩进行频谱分析的原因。拟二维运动的选择极大地降低了网格划分和时间处理的计算难度,也清楚地说明了湍流相互作用和船尾形状背后的物理特性。这也有助于了解船尾对稳定性和机动性的作用。但是,必须指出,关于其他转动运动(横摇和纵摇)的信息没有考虑在内。
数值仿真
2.1前处理
使用OpenFOAM平台时,第一步是模型的建立,在控制体中对域信息进行离散化。在本例中,数值仿真是在一个长度为7米、宽度为7米、厚度为10厘米的板形风洞内进行的,需要一个基于有限体积法的模型,该模型将整个空间划分为小的体积单元。虽然这个模型实际上是二维的,但是为了使用OpenFOAM,我们需要在真实的三维空间中创建一个“准二维”域,在z方向上有单层,在前后平面有特殊的边界条件。我们的研究使用了一个由Altair公司(HyperMesh)提供的软件,该软件专门用于网格的预处理,在商业上称为HyperMesh。该工具允许创建和连接不同类型的元素,这些元素构成了所研究的控制体的离散化。这里提出的模型具有两种类型的三维元素:六面体和五面体。这种组合元素的策略对于提高仿真的精度和性能是必要的(Jasak, 1996)。因此,将表面划分为三个参考区域,每个参考区域定义了不同程度的细化,如图2所示。可以注意到区域II和III中的细化程度。这些区域是造成AUV船体周围湍流的最重要因素。因此,必须仔细计算速度场的导数,特别是船尾后的湍流尾流内,靠近AUV壁面,包含湍流边界层的区域。由于这些原因,只在区域III中使用了六面体单元,这些单元具有偶数个节点,允许构建结构化和更精细的模型。在图2中,我们注意到这些单元遵循线性结构,并且在各个方向上的生长速度是一致的,这对于确保在后处理过程中以一种平衡的方式观察到这些现象是很重要的。图3展示了这三个模型的离散空间。
图2 以T1为例,将计算域网格划分为三个区域。图中绿线内的区域I,网格较粗糙; 蓝线内的区域二,中间网格细化;红线内的区域III,包括边界层,网格高度细化。
图3 从左到右可视化几何图形T1、T2和T3的网格
2.2计算
本文采用大涡模拟湍流模型和瞬态解(pisoFoam求解器)进行了数值模拟。除了定制解决方案的原方法的可能性的问题,用户只需要用C 语言编写代码,就可以用OpenFOAM平台提供的多种选择来替代上述选择。
在流体动力学中,流动问题由速度场的N-S方程控制
以及连续性方程,或者质量守恒方程
式中:为流体密度,为流体速度矢量,为压力,为粘性系数,为外力
为了将深海流体定性为盐水,建立了微分方程解所必需的系统参数和初始条件,通过调整无扰动速度来调整洋流和运动物体的相对速度。AUV典型的对地运动速度在1-2节之间。在这些仿真中考虑的相对流动速度是3米/秒,相当于1.5节。在区域边界和AUV壁面均采用了防滑条件。
利用OpenFOAM对AUV表面的应力张量积分,在求解N-S方程的过程中,分别计算了力矩T、阻力D和升力L,并将其投影到阻力、升力和力矩方向上。阻力、升力和扭矩的水动力系数定义为:
式中:为模型外表面的面积,为长度,风洞入口的速度,为流体密度
系数、和都是无因次的。这些系数都与流体速度有关,决定了阻力、升力和力矩是流体速度的多少次方,也就是说,它们决定了这些量如何偏离平方关系。
计算了每个AUV几何形状和每个攻角的三个系数,即水流和AUV首尾轴之间的角度,范围从0到15。力矩是分析稳定性和操纵性的基础,在所有情况下,我们都观察到了两种不同频率范围的时间振荡,如图4所示为升力系数。这些振荡起源于AUV尾部湍流的旋涡,如图5所示。
图4 来流下T1几何形状的典型的升力系数振荡
图5 攻角为10°时AUV模型中由湍流引起的速度(U)振荡
2.3后处理
输出数据的分析从ParaView工具包(OpenFOAM平台的后处理工具)开始。在这里,可以详细地看到流动时间线的一般条件,如图6所示的特别说明的速度矢
量场。然后用FORTRAN语言编写的程序对仿真后的阻力、升力和扭矩进行了统计分析。
图6 T1模型在攻角为0°时流场中速度矢量场(U)的副视图图像
图7所示的直方图表示T1鱼尾形船尾在攻角为10时的升力系数分布。值得注意的是,在这种不对称条件下,我们仍然得到一个高斯分布。另一方面,图8显示了相同攻角为10°下AUV模型上力矩的直方图。在这种情况下,我们观察到分布剖面上的不对称性。这种不对称性和力矩谱分析对于研究稳定性和操纵性至关重要。
图7 T1模型在攻角为10°的升力系数直方图
图8 T1, T2和T3模型在攻角为10°的扭矩系数直方图
虽然在经过AUV的水流的湍流状态中表现出很大的频率范围,但是远离船体的水流的稳定特性保证了遍历假设的假设(Tennekes and Lumley, 1972)。事实上,在大量的迭代()过程变得稳定。我们的意思是,对于任意给定的字段,例如的平均时间
不依赖是否大于等于。在这种情况下,集合平均lt;hellip;gt;(Lumley, 1998)可以被从开始的大时间间隔内的时间平均所代替:
通过方程(6)得到的结果,我们将所有后处理计算的起点对应迭代10000,区间T对应迭代40000,取平均值。
结果与讨论
图9显示了三个系数的平均值作为攻角的函数。重要的是要强调这一事实,即假定水流通过其左舷到达AUV。因此,该攻角在顺时针方向上逐渐增大。x轴从左到右沿水流方向移动。当攻角为零时,y轴从左舷指向右舷,因此z轴指向“上”,在图中所示的平面外。这意味着攻角越小,力矩越大,反之亦然。
图9 T1、T2和T3模型的阻力、升力和力矩系数关于攻角的函数
在所有的攻角下,T1模型的阻力要比其他两个模型大得多,这是因为在这个模型中,阻力作用的横截面积最大,从而产生了维持运动所需的高功率。观察T2的行为,我们注意到在攻角接近6度时的阻力略有增加,T2和T3都有随着攻角增加阻力的共同趋势。这说明鱼尾形状对有效横截面的影响增大。事实上,当以顺时针方向测量角度时,底部的尾部增加了横截面,而顶部的尾部在一定角度后进入船首的阴影区。
另一方面,当AUV的几何形状为较大的“鱼尾”时,模型T1和T2的升力值最小。与阻力系数相反,T1和T2的升力随着攻角的增大而减小,在攻角接近6度时有局部最小值。这个最小值的原因与阻力系数的局部最大值相同。值得强调的是鱼尾形状对减小升力系数的起着重要作用。
图9的最后一张图显示了与之前图表相同条件下的力矩系数。要注意的是,仿真假定攻角增加的方向对应于绕船头-船尾的顺时针旋转轴。正礼矩使首尾轴逆时针旋转,绕轴通过质心。因此,增加攻角,施加在AUV上的正力矩可以减小首摇,实际上,当攻角增加时,通过流体对AUV船体施加正力矩,就可以达到稳定(在无舵的情况下)。换句话说,给定攻角下的稳定性是由力矩与攻角的正导数决定的。攻角的正偏差意味着水动力(阻力和升力)共同作用,如果导数为正,则产生一个恢复力矩。对于中性舵,当AUV不受控制时,正的流体动力矩将船首转向当前方向。考虑到上述因素,我们可以看到,例如,当AUV正面面对水流时,T3是稳定的,而T1和T2是不稳定的。
另一个问题与操纵性有关。在这种情况下,AUV尾流产生的旋涡至关重要。鱼尾形船尾影响产生的旋涡大小(Patil and Tiwari, 2008),因为障碍物在高雷诺数流动中会产生大量旋涡(da Cunha Lima et al., 2017)。图10为三种模型在AUV尾流中产生旋涡的模拟图片。
图10 由左至右分别为T3、T2、T1三种模型所产生的湍流
在这部分工作中,我们考虑了保持航向所需的每分钟舵上的运动次数,以此作为操纵性的度量。就AUV而言,这反映在频率和振幅范围上,控制系统必须干扰以保持航向。
为了获取这样的指标,我们采取了以下办法。首先,我们得到了力矩在一个足够大的周期内的时间序列,然后我们对这个时间序列进行傅里叶变换。注意到在实际运动中,AUV存在惯性,我们又通过自平均过程消除了液压力矩的高频分量对首摇的影响。因此,我们手动选择截止频率,只考虑低频区域内的分量(小于截止频率)。利用这些分量,我们进行反变换以获得力矩的滤波时间序列,在此基础上我们分析了操纵性。我们选择的截止频率是3赫兹。结果如图11所示,我们观察到模型T1比其他两个模型需要更少的频率和更规律的控制干预。
图11 来流下T1上力的波动和滤波后的力矩
总结
本研究的目的是是了解湍流对AUV在不同攻角下,以3m/s的速度运动时的稳定性、可控性和操纵性的影响。为了控制尾流湍流的产生,同时观察船中后的旋涡对AUV船体的影响,我们设计了三种不同形状的鱼尾形船尾,并保持湿面积不变。基于上述数值模拟,我们可以得出以下结论:
(1) T1形船尾具有最大的横剖面积,于是在小攻角的情况下提供了更大的阻力。随着攻角的增大,T1形船尾和T2形船尾的阻力几乎相等,除了T2形的振荡是由于船尾的遮蔽效应。在大攻角下的情况下,由于遮蔽效应相同,模型间的差异减小。
(2) T3形船尾使AUV接近机翼的形状,而机翼的升力随着攻角的增大而增大
资料编号:[4748]

