基于期望压力分布的AUV船体形状设计
摘要:
自主式水下潜器(AUVs)的作用在探索深海的过程中在现在比以往任何时候都更为重要得多。AUV的船体形状对应各自的特殊要求而有所不同。因此,应用于这类船舶的船体形状设计的不同类型算法每天都在发展。在目前的工作中,一个新的程序已经被提出用来设计AUV的船体形状。使用这种基于所需压力分布的方法,可以获得所需的船体形状设计。人工神经网络算法已用于此目的。通过对Hydrolab500 AUV主体周围的流动进行CFD模拟,获得了网络训练和测试的初步数据。在这方面,通过改变AUV的鼻部和尾型轮廓对每个样本船体周围的压力分布进行了评估。从这项研究获得的结果表明,与期望压力相关联的船体能被设计得更合理。
关键字:
自主式水下潜器、船体设计、期望压力分布
1.简介:
今天,考虑到世界的快速发展,人口和粮食资源短缺,矿产资源短缺,材料和化石燃料短缺,海洋资源的可获得性已变得十分重要。自主式水下潜器(AUVs)在对海洋矿物和生物的探索和保护方面变得越来越重要[1-4]。一个典型的AUV必须能够以尽可能低的功耗在海中执行特定任务。这需要特定的船体设计与流体动力学方面的流动条件相适应。因为AUV的鱼雷形状,使AUV具有较小的阻力系数,进而使AUV能够以同样的速度行驶更长的距离。设计一个轴对称体让阻力尽可能小是设计师的主要目标。当粘性流场中的层流状态占主导地位时,可以获得更多有效的结果。使用AUV主体的流线形状是实现最佳形状体的解决方案之一[5,6]。将船体外形分为三部分(鼻部,中体和尾部)并为每个部分提供一个参数可能是可行的。然后,可以评估船体外形对相应操作条件下产生的曳力的影响。通过广泛的调查,研究人员已经提出了在实际操作雷诺数下可能的最小阻力的流线型物体。这种具有特殊形状的船体的一个主要设计目标是用于将部件集成在期望的布局中的建筑学设计过程,这使得制造既具有挑战性又昂贵[7-9]。因此,轴对称体的轮廓必须符合与内部组件布置有关的其他要求。由于包括附加质量和二次或线性阻尼在内的流体动力学系数可以通过计算AUV的体形参数来计算,船体外形特性对于从事AUV船体设计阶段工作的研究人员至关重要[10,11]。此外,在钝鼻部上发生的最终气蚀以及旋转体上流体分离和旋涡脱落的控制也很大程度上取决于局部压力分布[13]。 Myring的参数是最着名的参数,并已被用于设计几个AUV的鼻部和尾部[12]。然而,在设计船体所需条件时,尚未考虑由于部件的布置而造成的限制。幂函数可以用来描绘AUV中鼻子和尾巴的轮廓[13]。开发适当的方法来探索AUV的优化体形是目前需求,而这一需求引起了一些算法的开发,这些算法同时考虑了体系结构和制造要求以及流体动力学要求[14]。最小阻力,鼻部的最小压力,最小流体噪声,制造成本的降低以及设备效率的提高通常被认为是AUV船体形状的优化算法的传统的目标函数[15,16]。由于CFD结果的实现成本要低于实验成本,因此这些算法提供了实用的方法来将CFD仿真的结果引入最优化算法中。然而,由于需要大量的仿真,这种方法有些昂贵,所以已经开发了替代算法来降低这种方法的成本。在这些算法中,实验设计(DOE)和替代模型被用来为水下航行器的形状优化生成精确的近似值[17]。此外,代用方法被用来计算便宜的低保真度模型来构建一个准确的,但CPU密集型高保真度模型的替代品[18]。
在目前的研究中,Hydrolab500的船体是通过结合逆算法设计的。为此,使用了人工神经网络的方法,而目标函数是船体期望压力分布。通过确定船体上的压力分布,可以确定粘压阻力和鼻部上的最小压力。因此,适当的船体设计可以实现上述参数。仿真结果仅用作算法开发的初步数据;因此,基于Hydrolab500的船身设计约束,初步的参数已经在第一步中考虑到。通过改变鼻部和尾部的轮廓,然后通过对它们周围的流动进行数值模拟来评估船体。这些模拟的结果已被用作逆算法中的初步数据。换句话说,船体周围的压力分布已经考虑了所需的条件,并且将在根据该压力分布使用船体的逆算法之后得到检验。
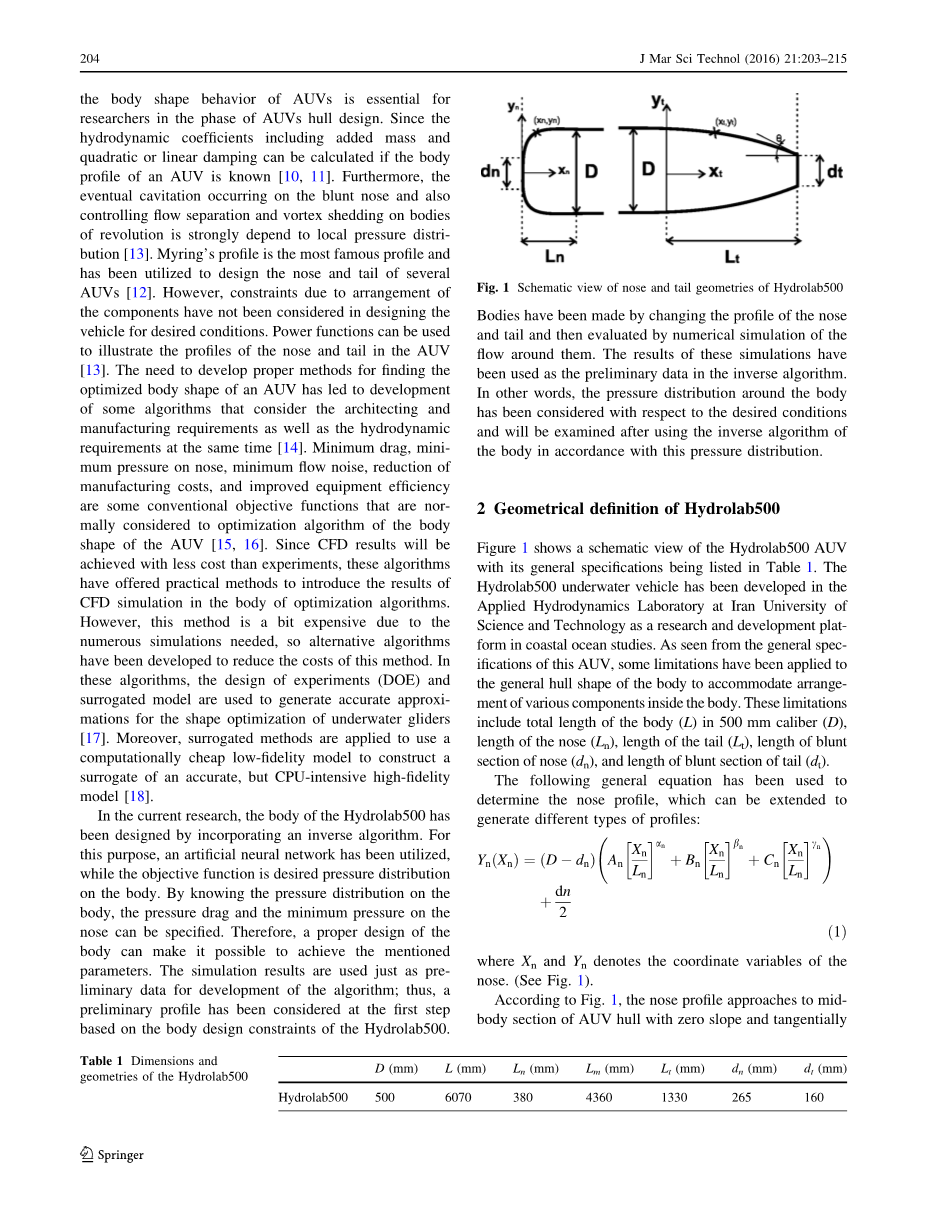
图1.Hydrolab500的鼻部和尾部的几何示意图
Hydrolab500的几何定义
图1为Hydrolab500 AUV的示意图,其一般规格列于表1中。Hydrolab500 AUV已在伊朗科技大学应用流体动力学实验室开发,作为沿海海洋研究工作的研究和开发平台。 从该AUV的一般规格中可以看出,对船体的一般船体形状应用了一些限制,以适应船体内各种组件的排布。这些限制包括在500毫米直径(D)中的船体总长度(L),鼻部长度 Ln),尾部的长度(Lt),鼻子的钝头部分的长度(dn)和尾部的钝头部分的长度(dt)。以下通用公式已被用于确定鼻部参数,该参数可以扩展以生成不同类型的参数:
表1.Hydrolab500的几何尺寸
根据图1,鼻子轮廓接近中等身体部分的AUV船体,零斜率并切向附着于中体。 通过将Hydrolab500的鼻子上的几何约束应用于鼻部的方程,该方程的未知参数数量将减少,如下所示:
因此,通过应用几何约束,鼻部剖面方程的未知系数就会减少。 同时,其他未知系数必须定义为生成鼻部考虑的形状。 因此,通过考虑一定范围内的独立系数并使其离散化,可以确定最终的系数集,使得鼻剖面具有正斜率和负凹度。 这些最终系数集可用于生成设计人员所需的鼻部轮廓。 同时,下面的通用方程已被用于确定尾部特征:
其中Xt和Yt表示尾部的坐标变量。 (见图1)通过在Hydrolab500的尾部应用几何约束,可以减少未知参数的数量,如下所示:
因此,尾部轮廓的独立未知系数被定义为使得期望的最终尾部轮廓具有负斜率和负凹度的系数。 表2列出了考虑Hydrolab500的鼻部和尾部特征的剖面系数。
表2.考虑Hydrolab500的鼻部和尾部特征的剖面系数
Hydrolab500周围的流体模拟
数值模拟已被用于当前研究中以产生逆算法中的初步数据。 因此,使用数值方法检查了Hydrolab500主体周围的不可压缩流体。 关于不可压缩流体的控制律涉及质量和动量守恒方程。 这些不可压缩流体方程的一般形式如下[23,24]:
其中q和ui表示i方向的流体密度和速度分量,xi表示i方向的空间坐标分量,而i =(1,2,3)。 p,dij和l表示牛顿流体的静态压力,克罗内克三角形和动态粘度。-rho;ursquo;iursquo;j是雷诺应力,可以从下面的公式得到:
在上面的等式中,mu;t代表湍流粘度,它应该使用湍流模型来模拟。 可实现的k - e [19]的湍流模型已被用于当前的流动湍流建模研究。
k - e模型的k - emodeldevelopmentment和k - emodel的两个主要特征有所不同。利用均方涡量波动传递方程推导出了湍流粘滞系数和耗散率运移方程。 可实现的k-e模型的好处是,它可以更准确地预测平面喷射和圆形喷射的传播速率。它也可能提供优良的性能,包括旋转,强烈逆压梯度下的边界层分离和再循环。 在可实现的k - e模型中,使用两个输运方程来模拟kande。使用该方法模拟轴对称体周围的流体与实验数据吻合[20]。
图2. DARPASuboff 船体周围压力系数(Cp)的分布
图3.计算域和边界条件
为了评估数值方案,对雷诺数为1.2 times;107的DARPASuboff潜艇进行了模拟。在图2中显示了DARPASuboff主体周围的压力系数分布(Cp),并比较了模拟得到的结果 与现有的实验结果[21],其中Cp由下式给出:
其中P是在压力系数评估点处的压力,Pinfin;是自由流压力,rho;是流体密度,Uinfin;是自由流速度。在当前的工作中,有限边界条件下的轴对称问题可以通过有限的计算域求解。计算域扩展到轴对称体前缘上端1L,体表1L以上,后缘5L。这里,L是身体的整体长度,如图3所示。该解决方案在结构化网格上评估。在目前的工作中,发现网格大小为60,000个单元格对于模拟是足够的,第一个网格点位于y+asymp; 30.因此,.因此,结合湍流模型,使用了基于墙法则的墙功能[22]。一个典型的近似船体的网格布局如图4所示。在数值解中,SIMPLE(压力连接方程的半隐式方法)算法[23,24]被用来计算压力场。 SIMPLE算法由20世纪70年代早期在帝国学院的Spalding和Patankar开发[24]。从那以后,它被研究人员广泛用来解决不同类型的流体流动和传热问题。输送湍流量的数值方案被设定为一阶迎风和二阶中心方案的压力和速度。模拟在雷诺数为3.0times;107时进行,其中雷诺数由下式给出:
其中U是自由流速的大小,L是AUV长度,v是流体运动粘度。 图5显示了从数值模拟获得的船体周围的压力场的轮廓。 船体周围的压力分布如图6所示。这些区域的压力分布已用曲线坐标表示,以使结果在鼻部和尾部更清晰,因为位于鼻部和尾部的压力的突然变化在这种坐标里可以显示得更光顺。
图4.船体周围的网格视图
图5.船体周围的压力场轮廓
图6.船体周围的压力分布a.整个船体b.曲线坐标中鼻部周围c.曲线坐标中尾部周围
4.结果和讨论
人工神经网络是一种功能强大的数据建模工具,可以捕捉和表示复杂的输入/输出关系和特征,如关联性,自组织性,泛化性和噪声和容错性[25-30]研究以获得设计师所期望的船体形状。最终的船体形状设计将为设计师提供他/她所需的压力分布。很明显,当船体周围的压力分布被确定时,鼻部上的最小压力和船体所产生的粘压阻力等参数也是已知的。网络训练和测试的初步数据将从数值模拟的结果中提取。此处选择Hydrolab500的鼻部和尾部的样品参数,并对每个参数的效果进行评估。首先,选择样本文件用于生成不同体积的鼻部。表3总结了考虑调查鼻子轮廓变化的系数。该表的最后一列给出了每个参数生成的卷。从该表中可以看出,这些参数是根据从最大到最小的生成体积进行排序的。
从图7中可以看出为数值模拟选择的鼻部形状。不同鼻部的摩擦力,压力和总阻力系数的值如图8所示对应由它们引起的体积变化。人们可以看到增加鼻部体积并不会显着改变摩擦阻力系数,但粘压阻力系数会增加,这导致鼻部体积增加时鼻子的整体阻力系数更大。鼻子部的最小压力的变化如图9所示对应与不同的鼻部体积。可以看到增加鼻部的体积减少了鼻部上的最小压力,这将增加鼻子前面的气蚀的可能性。为了探索改变尾部对Hydrolab500船体压力分布的影响,我们选择了不同体积的尾部样本。表4列出了考虑调查尾部轮廓变化的不同样本,将不同样本从最大体积分类到最小体积。
表3.研究鼻部参数改变时的系数
图7.为数字模拟选择的鼻部参数图
图8.不同体积的鼻部对应摩擦阻力系数、粘压阻力系数和总阻力系数
图9.不同体积的鼻部对应最小压力的改变
表4.研究鼻部参数改变时的系数
图10显示了选择用于数值模拟的尾部形状的示意图。
摩擦阻力、粘压阻力和总体阻力系数的值根据所形成的体积对不同的尾部进行了描绘。很明显,增加尾部体积导致了粘压阻力系数的小幅下降,而摩擦阻力系数却增加了,结果总体阻力系数因为尾部体积的扩大而增加(见图11) 。仿真结果表明,流体内运动船体周围产生的压力分布取决于船体形状的轮廓。换句话说,如果所有关于船体周围压力分布的有效参数都保持不变,那么压力分布的压力,压力导数和曲率将因为体型的改变而改变。因此,必须沿船体指定压力分布以识别船体轮廓,以便可以在任何给定点获得压力分布曲线的斜率和曲率。这个问题中未知的是船体特征任何一点的x-y坐标。S被定义为从船体的任何一点到定义的坐标原点的距离,其与x和y的关系如下给出:
其中S表示曲线坐标中任意一点与原点的距离,n表示标记点的索引,x和y表示笛卡尔坐标系中每个点的坐标。 在本文中,主要目标是在船体上的压力分布已知时,使用神经网络确定具有明确特征的船体特征。 为此,神经网络(包括100个神经元层)被定义为神经网络的输入定义如下:
其中P表示压力,Prsquo; = part;P /part;S表示压力导数,Gamma;表示压力曲线的曲率。
然而,神经网络的输出是:
其中x和y代表船体轮廓中每个点的确切坐标。 为了训练神经网络,压力的分布可以通过50个不同的船体模型获得,所有这些模型都遵从第一节中所述的等式。 2.为了验证所提出的方法,考虑了四种不同的鼻部和尾部轮廓,而不是用于训练网络的轮廓,并且围绕船体的压力轮廓通过模拟它们周围的流动来获得。
表5给出了与每个鼻部概况相关的系数,这些方程被选定用于验证所提出的方法。另外,
表6总结了尾部轮廓系数,该系数被认为验证训练网络用于预测船体轮廓的准确性。
图10.为数字模拟选择的尾部参数图
图11.不同体积的尾部对应摩擦阻力系数、粘压阻力系数和总阻力系数
表5.用于评估神经网络表现的鼻部系数
表6.用于评估神经网络表现的尾部系数
图12.用于评估神经网络表现所选择的鼻部压力分布
模拟船体鼻部轮廓周围流体的压力分布见图12。
通过模拟船体尾部轮廓流体所获得的压力
全文共6953字,剩余内容已隐藏,支付完成后下载完整资料
英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[16163],资料为PDF文档或Word文档,PDF文档可免费转换为Word

