英语原文共 11 页
This is the authorrsquo;s version of a work that was submitted/accepted for pub- lication in the following source:
Perez, Tristan, Smogeli, Oslash;yvind N. , Fossen, Thor I. , amp; Soslash;rensen, Asgeir
J. (2006) An overview of the marine systems simulator (MSS) : a Simulink toolbox for marine control systems. Modeling, Identification and Control, 27 (4), pp. 259-275.
This file was downloaded from: http://eprints.qut.edu.au/70833/
sect;c Copyright 2006 Norsk Forening for Automatisering
Notice: Changes introduced as a result of publishing processes such as copy-editing and formatting may not be reflected in this document. For a definitive version of this work, please refer to the published source:
http://dx.doi.org/10.4173/mic.2006.4.4
船舶系统模拟器(MSS)综述:船舶控制系统仿真工具箱
T. Perezlowast;⋆, Oslash;.N. Smogelidagger;⋆, T.I. FossenDagger;⋆, and A.J. Soslash;rensendagger;⋆
⋆ Centre for Ships and Ocean Structures—CeSOS
dagger; Department of Marine Technology
Dagger; Department of Engineering Cybernetics Norwegian University of Science and Technology—NTNU
NO-7491 Trondheim, NORWAY
摘要
海洋系统模拟器(MSS)是一种以控制系统设计为核心,为船舶系统数学模型的快速实现提供必要资源的环境。 模拟器针对不同的浮动结构及其执行各种操作的系统的模型(并提供了可模拟的示例)。 MSS开发所采用的平台是Matlab/Simulink。 这允许模块化的模拟结构,以及分布式开发的可能性。软件组件的开放性和模块化已经成为优先的设计原则,这使得知识能够系统地重复利用并产生用于研究和教育的有效工具。本文概述了MSS的结构、特点、当前的可访问性以及未来的发展规划。
介绍
海洋系统模拟器(MSS)是一种基于Simulink,以控制系统设计为核心,为船舶系统数学模型的快速实现提供必要资源的环境。它的发展始于挪威科技大学(NTNU),目前1在其他群体的帮助下进行。
自上世纪90年代初以来,大量资源被分配给挪威科学和技术大学的海洋控制系统领域。这使得学生和研究者们开发和使用了许多模型和仿真工具。MSS提供了这些分散成果的集成,并且允许在NTNU之外的研究人员和学生使用它,进
lowast;Corresponding author; Email:
一步的发展做贡献。 MSS的名称是在2004年确定的,用于描述实现海洋系统仿真的三个工具箱的合并:海洋 GNC 工具箱、MCSim和DCMV。
海洋GNC工具箱最初是由T.I.Fossen和他的学生开发的,作为其关于海洋航行器的导航和控制这门课程以及出版书(Fossen, 2002)的辅助工具。 这个工具箱为MSS提供了核心库。 MCSim是一个完整的模拟器,主要面向动力定位(DP)海上作业。 这个工具箱是由A.J. Soslash;rensen发起的,由挪威科学和技术大学海洋科学系的Oslash;.N.Smogeli和硕士生开发,作为新的硕士和博士学生的共同知识来源,见Soslash;rensen等人(2003)。 MCSim在各个级别(装置和执行器)都包含了复杂的模型,这些模型现在已经被重构到MSS的两个库中。 DCMV工具箱由Perez和Blanke(2003)开发,是一套面向自动驾驶仪设计的简化的Simulink模块。MSS包含了一小部分来自DCMV的模块和与波谱相关的功能,以及执行器。
自合并出MSS以来,作者和其他人一直在NTNU致力于提供一个用户友好的环境,该环境可以在不同的海上作业所需的复杂程度下针对不同的仿真场景—一些目标已经成功实现,但工作仍在进行中。 本文的其余部分描述了MSS的当前结构、特点、可访问性以及未来的发展规划。
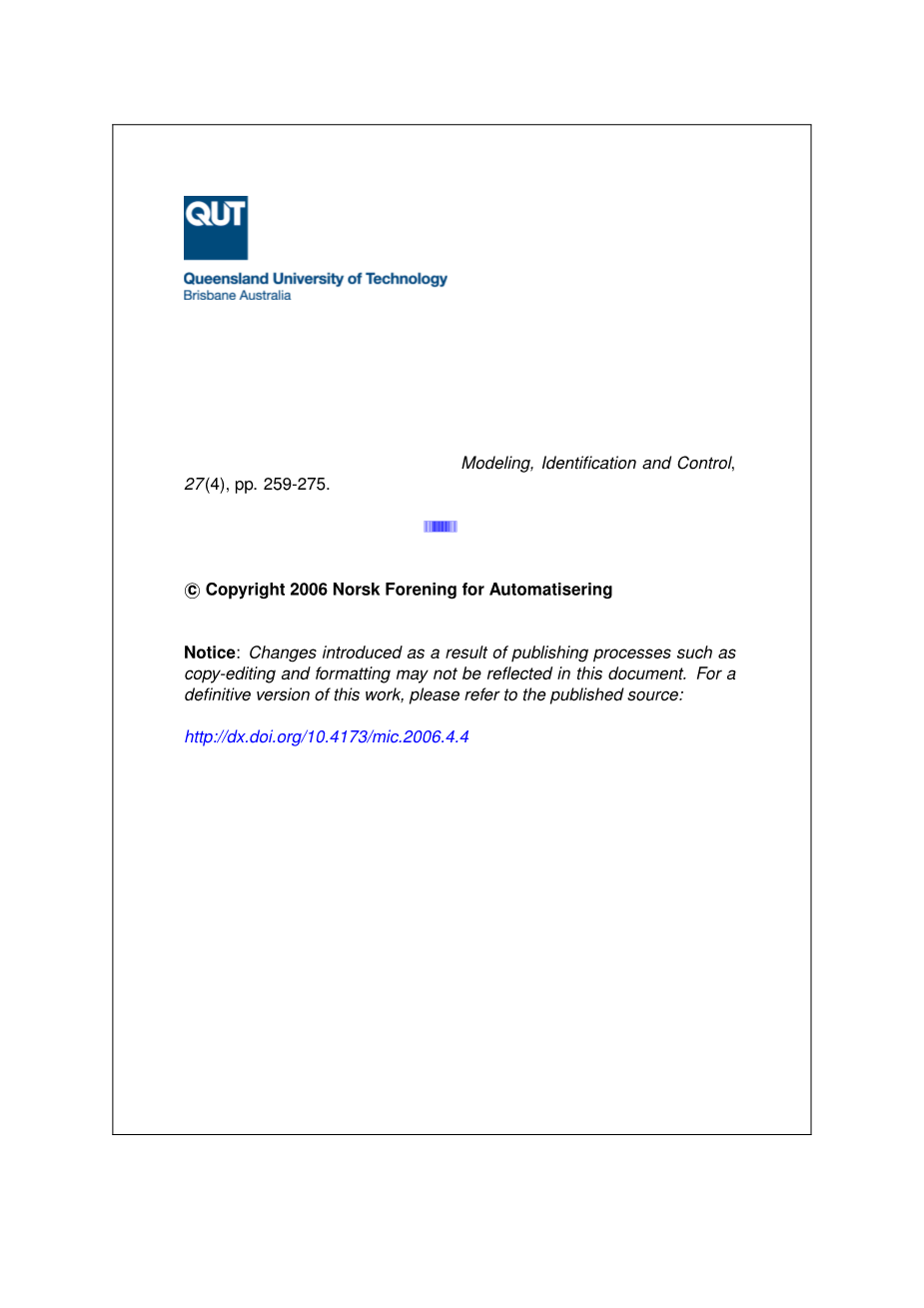
Model complexity
Process plant models Control plant models
Low level (actuator) models
件模型的需求。 例如,考虑离岸船舶的动力定位(DP)情况。在平静到中等的海洋中,动力定位系统的主要控制目标可以是通过抑制由于平均波浪力、海流和风引起的缓慢变化的距离来调节位置(北、东和航向)。随着海况的严重性增加,波浪引起的振荡运动通常需要作为扰动包括在内,纵摇和横摇引起的波浪振荡运动的减少可以作为附加的控制目标。
User
Education Research Industry Research Academic
Simulation
Scenario
Implementation Felxibility
Elementary components Full systems
这需要改变观测者和控制系统使用的模型(自由度数量和扰动模型)。
图1:仿真场景空间
MSS 范围
模拟器的范围是根据它可以处理的不同的仿真场景来定义的。这些不同的场景可以根据以下几点进一步指定:
-
- 模型复杂性,
- 执行灵活性,
- 用户熟练程度.
图1通过与我们熟悉的三维空间类比来说明这个概念。
模型的复杂性是由模型的目的和仿真结果决定的。 在数学建模中,高度复杂的模型和简单的模型之间有一个基本的平衡,前者能对真实系统的许多方面做出高度精确的描述,后者捕捉了系统的基本前景,在数学上易于分析( Naylor和Sell,1982 )。在控制文献中,复杂模型(过程装置模型)用于评估控制策略,而基准模型(控制装置模型)用于设计控制策略分析(例如,鲁棒性、稳定性、基本局限性) (Goodwin 等, 2001; Soslash;rensen, 2005b; Soslash;rensen, 2005a; Perez, 2005).
海洋系统模拟器(船舶、离岸设施、水下航行器、渔业等)。)需要进一步考虑模型根据船只执行的特定操作、海洋状态和速度的可变性。这些系统属性的变化导致海洋系统的响应、致动器的响应和控制目标的变化,这又可能导致不同类型的软
模拟器的实现灵活性描述了现有的模型和仿真场景是否可以很容易地适应于使用分配的资源来实现新类型的系统。 由于船舶和海上结构及其操作的多样性,这是海洋系统模拟器的一个特别具有挑战性的方面。因此,软件组件的开放性和模块化必须优先作为知识系统重用的设计原则。就MSS而言,由于以下原因,Simulink被用作开发平台:
-
- Simulink提供了灵活模拟器所需的必要模块化和易于实现的特性。
- Matlab和Simulink已经成为教育和研究中广泛使用的工具;这增加了MSS的灵活性,因为许多学生和科学家都可以使用这个开发平台。
- Matlab有一个巨大的优势是解决了许多底层问题:数值积分例程、绘图工具、数据交换和导出工具。
- Matlab/Simulink的实时车间设施提供了一种基于Simulink图快速生成原型控制器的方法,这些控制器实时运行在独立的计算机系统上,用于对比例模型或全比例系统进行测试。这也提供了实现半实物仿真的可能性。这对我们NTNU的学生来说尤其重要,因为学生可以很容易地在海洋控制论实验室的比例模型中实现他们的控制器——参见http://www.itk.ntnu.no/marinkyb/MCLab/
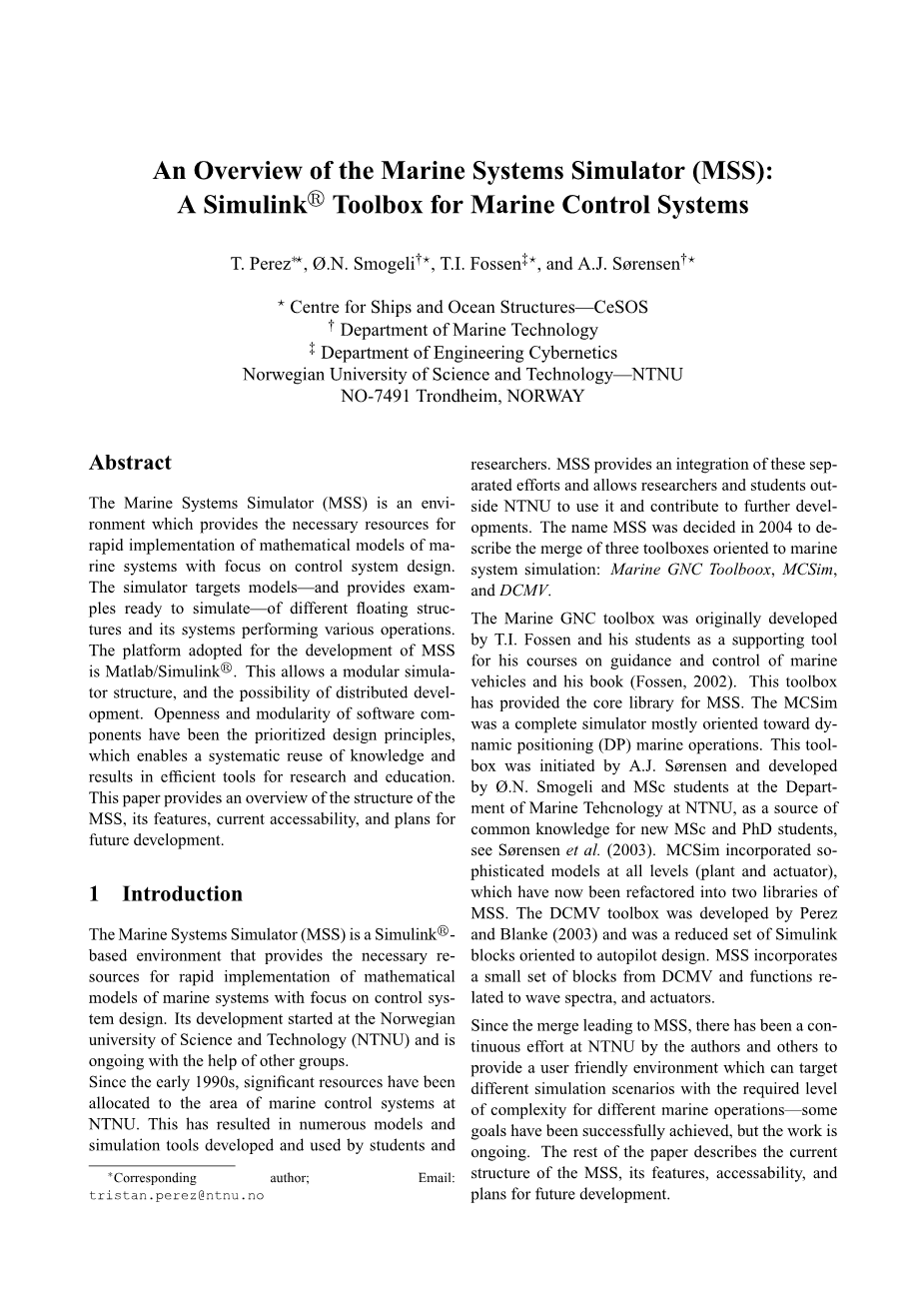
xn North
on
yn East
x ob
p Surge
xb, u
原点, on,位于平均自由水面的适当位置。这个框架被认为是必要的。
-
- 船身固定坐标系(b坐标系;向前-右舷-向下). b坐标系 (ob,xb,yb,zb )
h q b b b b
zn Down
oh
r
yh
Heave
zh zb, w
Sway
yb, v
固定在船体上。正xb轴指向船头,正yb轴指向右舷,正zb轴指向下方。对于船用航行器,选择该坐标系的轴线与惯性主轴重合;这决定了坐标系的原点ob的位置。
图2:船舶运动描述的符号和符号约定.
对于用户,MSS提供不同的选项。MSS最初是作为一种增加NTNU学生和研究人员获取和重用知识的方式而发展起来的。现在的MSS的不同组件已经在教育和研究中使用了几年,并且在特定的操作中集成了几个完整系统的演示。然而,由于它的模块化和组织性,MSS提供了一个基本模块和功能的核心库,这些模块和功能可以结合起来生成新的系统,以满足行业和学术界的搜索需求。
MSS中的数学模型
为了理解MSS的软件组织,让我们简要回顾一下建模系统的主要组件。与此同时,我们将介绍MSS采用的主要公约。
参照系和幅值
为了描述海洋系统的一般运动,我们需要考虑三个坐标来定义平移,以及三个坐标来定义方向(6自由度)。这些坐标使用两种类型的参考框架定义:惯性框架和船身固定框架。图2显示了MSS中采用的不同参考框架,这些参考系将在下面进一步说明(Fossen, 2002; Soslash;rensen, 2005b; Soslash;rensen, 2005a; Perez, 2005):
-
-
- 东北向下坐标系(n-坐标系). n-坐标系 (on,xn,yn,zn)固定在地球上。正xn轴指向北方,正yn轴指向东方,正zn轴指向地球中心。
-
流体动力坐标系(h型坐标系 ;向前-右舷-向下). h型坐标系 (oh,xh,yh,zh) 没有固定在船体上;它以船只沿其路径的平均速度移动。xh- yh平面与平均无水表面重合。正xh轴指向前
资料编号:[4158]

