
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
使用线激光和视觉用于水下机器人导航的短距离传感器
Nicholas Hansen Mikkel C. Nielsen, David Johan Christensen Mogens Blanke
丹麦技术大学,丹麦Lyngby(电子邮件:{pnha,miconi,djchr,mb}@elektro.dtu.dk)
挪威科技大学自主海洋运行与系统中心(AMOS)
摘要:本文研究了一种基于激光的简单距离传感器,用于自主水下航行器(AUV)的水下检测。 该范围检测系统系统包括两个激光器,垂直线投影到环境中,与摄像机的观察轴平行。 使用两个激光进行距离估算,传感器提供对环境的三维解释。 这是通过使用霍夫变换从图像中提取的点的三角测量而获得的。 我们通过OpenROV平台在仿真和物理概念验证实验中评估系统。
2015年,IFAC(国际自动控制联合会)主办Elsevier有限公司保留所有权利。
关键词:自主水下航行器,机器人视觉,激光视觉,短程传感器,水下导航
1绪论
岸上安装可以带来海事技术的发展,并能应对日益增加的检查和质量控制任务。这些检查任务必须在日益苛刻的条件下进行,因为岸上的设施迁移到更深和更粗糙的水域,因此需要更多的工时和昂贵的设备。一种可能降低维护成本和重要的生产停机时间的策略是使用自主水下车辆(AUV)自主执行检查任务。目前,检查这些岸上设施的常见方式包括现场部署船舶,配备遥控车辆(ROV)或AUV系统来执行检查。这两种系统都有缺陷,例如通过ROV检查被限制的水下结构往往是耗时的,并且包括系绳缠绕的风险。大多数检测任务可以由AUV解决,无需操作人员的干预,但目前的AUV标准通常是一个相当大的容器,使其无法在较小的受限空间内导航。
理想情况下,一个完整的机器人检测系统由一个容错多机器人系统组成,能够自动处理长期的岸上检查任务以及人造受限结构。 为了使这种解决方案具有可行性,机器人必须能够长时间浸入水中并接触环境,因此机器人需要一个基站来收容和充电。 检查任务将由能够在结构周围和/或内部导航的小型机器人执行。 机器人在完成检查任务后将检查数据发回给岸上的工程团队。
在未知的小型水下环境中进行导航的技术很大程度上可以归为声学或基于视觉。 诸如长基线(LBL)或超短基线(USBL)系统等声学辅助导航系统使用已知声转发器的位置进行导航,而多普勒速度测井(DVL)提供相对于海平面的速度估计值 Kinsey等人,2006)。 声学系统常见的是水温,盐度,压力和环境结构的复杂依赖性以及相对较高的成本(Chandrasekhar等,2006)。
几位作者研究了基于视觉的导航。这包括(Bruno等人,2011),他们证明了一种成功的用于立体视觉和结构光的三维近距离重建的方法,同时(Carreras et al。,2003)和(Garcia et al。,2003)使用从位于池的地板上的已知镶嵌图案的相机图像中提取的数据显示导航和定位。在几篇论文中描述了描述使用激光进行水下距离估计的工作。在(Fournier,1993)中,作者提出使用激光来提高水下摄像机的图像质量,而不是计算图像中物体的距离,目标是提高图像的质量,使操作人员能够进行的物体检测距离更远。 (Chen和Lee,2000)描述了在激光点和相机框架之间使用三角测量的系统,结果显示亚毫米精度在450mm和1200mm之间。三角测量法扩展到两个激光器(Kondo和Ura,2004),作者利用附加信息对不同物体进行导航。在这种情况下,激光器相互平行安装。 (Karras和Kyriakopoulos,2007)研究了基于激光视觉的导航。然后将激光视觉数据与卡尔曼滤波器中的IMU数据融合以限制导航估计的漂移。
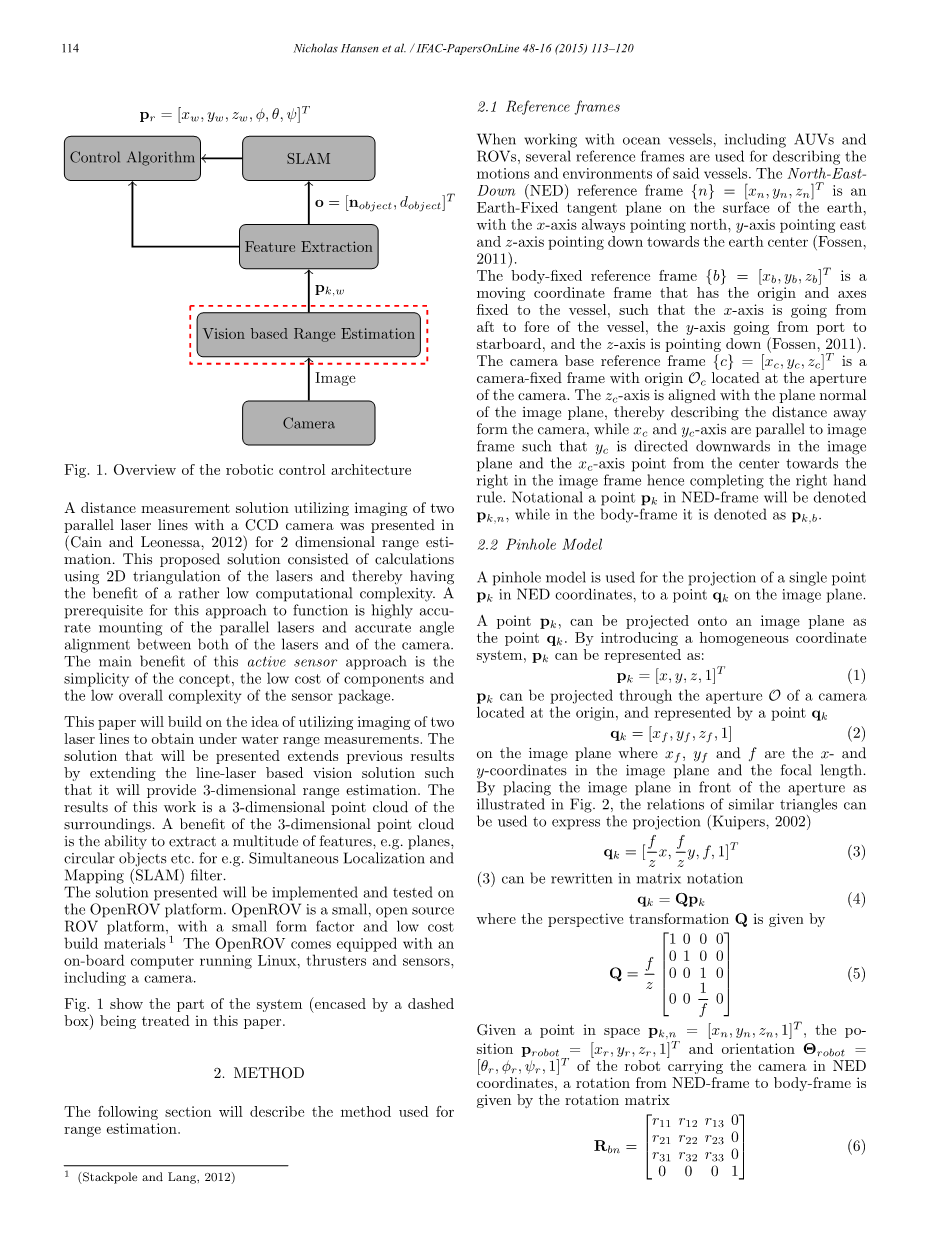
控制算法
相机
基于视觉的距离Range Estimation
特征提取
映射
图1.机器人控制体系结构概述
(Cain and Leonessa,2012)提出了一种利用CCD摄像机对两条平行激光线进行成像用于二维范围估计的距离测量解决方案。 这个提出的解决方案由使用激光的二维三角测量的计算组成,因此具有相当低的计算复杂性的好处。 这种方法的一个先决条件是高精度地安装平行激光器和激光器和相机之间的准确角度对齐。 这种有源传感器方法的主要优点是概念简单,组件成本低,传感器封装整体复杂度低。
本文将基于利用两条激光线成像来获取水下测量范围的想法。通过扩展基于行激光的视觉解决方案扩展先前的结果来呈现解决方案,使得它将提供三维范围估计。 这项工作的结果是环境的三维点云。 三维点云的好处是能够提取多种特征,例如, 飞机,圆形物体等用于例如 同时定位和映射(SLAM)滤波器。
所提出的解决方案将在OpenROV平台上实施和测试。 OpenROV是一个小型的开源ROV平台,具有小巧的外形和低成本的构建材料1 OpenROV配备了一个运行Linux的机载计算机,推进器和传感器,包括一个摄像头。
图1显示了本文中正在处理的系统部分(用虚线框包围)。
2 方法
以下部分将介绍用于范围估计的方法。
2.1参考框架
在与包括AUV和ROV在内的远洋船舶一起工作时,使用若干参考框架来描述所述船舶的运动和环境。 东北向下(NED)参考系{n} = [xn,yn,zn] T是地球表面上的固定地球的切平面,其中x轴总是指向北,y轴指向 东和Z轴指向地心(Fossen,2011)。
身体固定的参考系{b} = [xb,yb,zb] T是一个移动的坐标系,它的原点和轴固定在血管上,这样x轴从血管的后部到前部, y轴从端口到右舷,z轴向下(Fossen,2011)。 摄像机基准参考系{c} = [xc,yc,zc] T是一个摄像机固定帧,其原点Oc位于摄像机的光圈处。 zc轴与图像平面的平面法线对准,由此描述相机的距离,而xc和yc轴平行于图像框,使得yc在图像平面中向下指向,并且xc轴 从图像框中心向右指向,从而完成右手规则。 NED帧中的点pk的记号将表示为pk,n,而在身体帧中则表示为pk,b。
2.2针孔模型
针孔模型用于在NED坐标中将单点pk投影到像平面上的点qk。 点pk可作为点qk投影到图像平面上。 通过引入一个齐次坐标系,pk可以表示为:
pk =[x,y,z,1]T (1)
pk可以通过位于原点的照相机的光圈O投影,并由点qk表示
qk =[xf,yf,zf,1] (2)
在图像平面上,其中xf,yf和f是图像平面中的x和y坐标以及焦距。 如图2所示,通过将图像平面放置在孔的前方,类似三角形的关系可以用来表示投影(Kuipers,2002)
qk = x ,T (3)
(3)可以用矩阵符号重写:
Qk = Qpk (4)
透视变换Q由下式给出:
(5)
给定空间点pk,n= [xn,yn,zn,1] T,位置probot = [xr,yr,zr,1] T和方位theta;robot= [theta;r,phi;r,psi;r,1] T 在NED坐标系中携带相机的机器人的旋转矩阵给出从NED帧到身体框架的旋转
(6)
图2修改的针孔模型
其中Rbn是从NED帧到物体的旋转矩阵,定义为:
Rbn = RT nb (7)
以及由平移矩阵Tbn给出的平移:
(8)
需要在体帧坐标pk,b = [xb,yb,zb,1] T中表示NED帧中的点pk,n = [xn,yn,zn,1] T。 用翻译和旋转重写(4):
qk,b = QRbnTbnpk,n (9)
其中pk,n和qk,b分别是NED和body-frame中的第k个点。 此外,相比于身体框架,图像平面可以在方向和原点上不同。 为了实现从NED-框架到相机框架的投影的完整的一般形式,需要另外的旋转和平移:
qk,c = QRcbTcbRbnTbnpk,n (10)
因此,可以考虑相机的任何给定的安装位置和方向。
2.3三角
通过在照相机的上方和下方放置两个激光器,每个激光器投射与照相机的观察轴平行的激光线,投射的激光器可以用于三角测量。 图3示出了投影到观察轴上的图2中的三角形ODH,用于顶部和底部激光器,因此示出了二维设置。 请注意,该部分剩余部分的激光点将在主体框架pk,b = [xb,yb,zb,1] T中处理,因为到NED帧的旋转是旋转和平移的简单事情 由一个AUV姿势。
激光器可以看作是分别产生一个点D和F,它们通过原点O投射到像平面上作为点A和C.激光器之间的基线距离b将反射距离zb,因为 激光是平行的(Cain和Leonessa,2012)。
图3 激光传感器三角测量的侧视图
zb = b (11)
2.4 扩展三角测量
在(Cain和Leonessa,2012)中,激光器之间的总基线距离b用于对未知物体的单个距离进行三角测量。 在这项工作中,我们提出了一个独立使用每个激光器的解决方案,因此每个激光器都可以实现距离估计,参见图3.信息的增加会导致结果的维数增加,因此我们能够重建三维激光器, 而不是二维点云。
考虑图3中的设置:相机的激光器和光圈(点O,D和F)创建了一个三角形,该三角形与图像平面上的投影点和光圈(点O,A和D) C)。 使用这两个三角形之间的关系会导致一个距离(从原点O到点E)。 然而,如图3所示,激光投影点创建了四个成对相似的三角形 - 以相机视轴作为三角形的底部 - 而不是仅使用两个(Cain和Leonessa,2012)。 三角形ODE和OAB,OEF和OBC成对相似,角度为ang;OAB=ang;ODE,ang;OCB=ang;OFE。 通过定义从点A,C,D和F到相机观看轴(点B和E)的距离,如:
Yc(1) Zb(1) (12)
Yc(2) Zb(2) (13)
与三角形的相对边界定义,(4)中的关系可以用来找出距离x(i)b。 将定义插入(3)和(4)中类似三角形的关系中
[x(i) c ,y(i) c ,z(i) c ,1]T = RcbTcb[x(i)
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[23029],资料为PDF文档或Word文档,PDF文档可免费转换为Word

