英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
信号交叉口的电动自行车管理和控制
摘要:电动自行车(EB)是城市交通系统中一种常用的交通工具,但在信号交叉口有一定的无序运动行为。在本文中,我们提出了一种在区间内控制每个电动车信号化的策略,并设计了一些规则来探讨每个电动自行车的运动以及所提出的策略对信号交叉口每个电动自行车运动的影响。数值结果表明,该策略可以提高信号交叉口的运行效率。研究结果有助于管理者对电动自行车中的电动自行车进行规范化管理。
关键词:电动自行车 逆行 红灯运行 策略 信号交叉口
1.介绍
到目前为止,电动自行车(EB)已经在中国普及,2012年和2015年的电子自行车数量分别达到3100万辆和3680万辆[1]。由于电动自行车具有一些突出的优点(例如成本低、体积小等),许多人(尤其是通勤者)已经改变了交通工具。在交通工具方面,15%-24%的人选择了汽车,60%的人选择了公共汽车,7%的人选择了传统自行车。电动车[2];在上海,出现了一些类似的现象[3]。然而,由于电动车的规模非常小,许多混乱的交通行为都会发生。例如,红灯运行和逆行现象普遍存在,产生了许多复杂的交通现象(如拥堵)。因此,电动自行车给交通系统带来了许多挑战(尤其是信号交叉口的运营效率和交通安全)。这些挑战要求研究者去探索电动自行车引起的复杂的交通现象,除了电动自行车的速度比自行车(CB)大之外,电动自行车的运动与自行车的运动相似,这表明自行车流的模型可以用来研究电动自行车流。对于电动车流研究者提议任何模型来描述由自行车流[4–12]引起的复杂交通现象,其中模型大致分为三组。
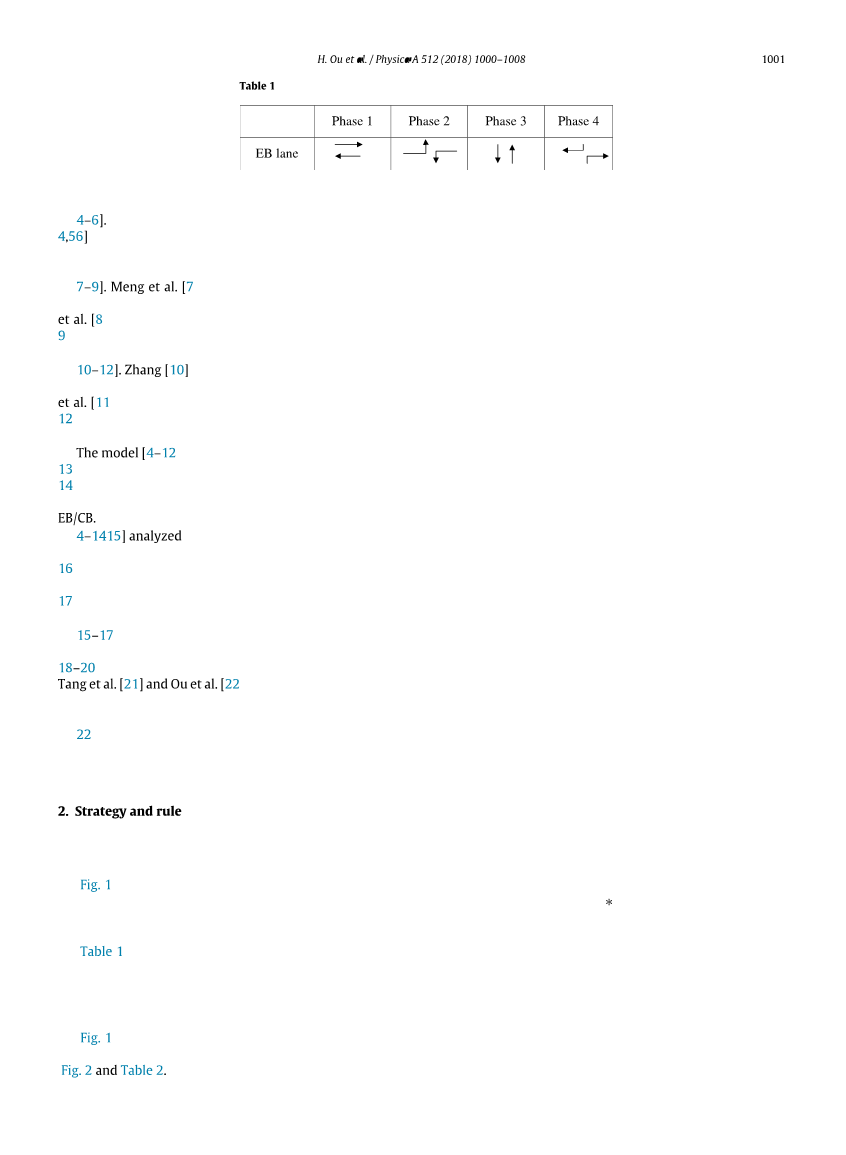
表1信号交叉口的电动自行车相位信息
|
阶段1 |
阶段2 |
阶段3 |
阶段4 |
|
|
电动自行车车道 |
1.提出了一些CA(细胞自动机)模型来研究CB在不同条件下的运动[4-6]。Nishinari和Takahashi[4,5]开发了BCA(Burgers CA)模型和电动自行车CA(Extended BCA)模型。江等人。[6]分析了CBS之间的相互作用,提出了一种改进的电动自行车CA模型来探索CBS引起的复杂现
2.提出了一些模型来探讨车辆与CBS之间的相互作用[7-9]。孟等[7]提出了一个CA模型来研究CB流量、变道概率和通行能力之间的定量关系。程等人[8]分析了断路器进入车辆车道的行为,得出了断路器概率与容量的定量关系。赵等[9]提出了一个耦合CA模型,以探索CBS与靠近美国的车辆之间的相互作用。
3. 提出了一些CA(细胞自动机)模型来研究CB在不同条件下的运动[4-6]。Nishinari和Takahashi[4,5]开发了BCA(Burgers CA)模型和电动自行车CA(Extended BCA)模型。江等人[6]分析了CBS之间的相互作用,提出了一种改进的电动自行车CA模型来探索CBS引起的复杂现象。部分模型研究了交叉口附近复杂的现象[10-12]。任志刚等[11]提出了一个模型来探索CB的运动,以及发生在中间路段的车辆队列的形成和消散。Radhakrishnanetal[12]开发了一个与其他和其他干扰研究相匹配的模型,该模型显示了由半直行交通流或信号中间路段引起的有序交通现象。
模型[4–12]可用于研究假设速度是基于B的特性定义的,但并未描述电动自行车S导致的复杂交通现象。为了研究假设速度,Jin等人[13]提出了Ni电动自行车ca(改进的扩展汉堡SCA)模型,以研究考虑CBS和eBs的确定流量。Xuetal[14]利用杭州收集到的现场速度数据研究了CBS和eBs的确定流量。表源流的速度分布,以及电动自行车/断路器的校准值和速度。
然而,模型[4–14]并未对交叉口的电动自行车安全性进行调查。对于历史记录,Luetal[15]分析了电动自行车在区间的运动,并发现红灯运行行为是引起电动车事故的一个重要原因,这是因为电动自行车的安全性。Wuetal[16]使用了伺服数据来研究B/电动自行车的窒息性信号的中间部分,并且发现B/电动自行车有红灯。运行行为:电动自行车发生概率(63%)大于CB发生概率(53%),且电动自行车与CB发生事故的频率、严重程度等存在差异。胡适等人[17]发现电动自行车的频率和严重程度大于其引起的Bhashighers速度和严重程度。
结果见参考文献。[15–17]表明大多数CB/电动自行车事故是由两个异常运动(例如红灯运行和倒退)引起的。为了描述这两种异常行为,研究人员使用观测数据分析了统计特征[18–20],但他们没有研究这两种异常行为导致的复杂交通现象。最近,Tangetal[21]和Ouetal[22]开发了两个CA模型来研究电动自行车的变道、逆行和红灯运行,发现这三种行为对每个电动自行车的运动(尤其是逆行和红灯运行)都有很大的影响,但他们没有制定一些控制负面影响的策略。
2.战略和规则
在本节中,我们提出了两种控制电动自行车运动的策略,然后设计了规则来描述两种策略下的每个电动自行车运动。在提出这些策略之前,我们提出了以下假设:
1)情景分为1-6区(见图1)。1-4区有三条车道(即右车道、中车道和左车道);5区和6区有两条车道;每条车道被分为若干单元,其中大小为0.75 m*0.75 m;1-4区的长度为442个单元,5区和6区的长度为460个单元;1区的两条停车线分别位于第200和242个单元,而5区和6区的停车线则位于5区分别位于第200和460个细胞。
2)信号交叉口有两个左转相位和两个直行相位(见表1);周期为60s,其中每个相位有20s。注:由于绿色分流对数值结果没有定性影响,因此本文不进一步研究其影响。
3)十字路口既没有车辆也没有行人。
4)电动自行车和乘客是均匀的;每个电动自行车的长度为1.5米,宽度为0.75米,即电动自行车占据两个单元。在本文中,我们构建了一个控制交叉口每个电动自行车运动的策略(见图1),其中规则是交叉口禁止逆行和红灯运行。接下来,我们设计了策略下每个电动自行车运动的规则。在设计规则之前,我们应该定义一些符号,如图2所示。表2。
图1信号交叉口示意图
图2。一些参数的示意图
两种策略下的每个电动自行车运动可以分为三个步骤,即加速、减速、随机化和更新。由于变道对加速、随机化和更新没有影响,因此可以通过以下三个步骤来计算:
- 加速度:,其中是电动自行车的最大速度,本文将定义为6个单元。
2)随机性:,其中概率是p。
3)更新:。
变道对减速过程有很大的影响,应将减速定义为:
- 当没有变道行为发生时:。
- 如果车道发生变化,我们将定义为min;我们计算,,即如果安全条件不满足或nth 电动自行车的左(右)车道不存在,()定义为0;最后,我们将定义为nth 电动自行车的当前速度,相应的车道定义为nth 电动自行车的当前车道。具体规则如下:
min.
如果存在并且,;否则=0;
如果存在并且,则=;否则=0;
如果,则,;
如果,则,;
如果,则;.
表2某些符号的物理意义(见图2)。
|
停车线与转弯电动自行车进入预期车道位置之间的距离 |
|
|
第n个电动自行车和电动自行车之间的距离 |
|
|
第n个电动自行车和电动自行车之间的距离 |
|
|
第n个电动自行车在方向上移动的单位数 |
|
|
第n个电动自行车和电动自行车之间的距离 |
|
|
第n个电动自行车和电动自行车之间的距离 |
|
|
第n个电动自行车s的位置 |
|
|
车道1,0,-1分别表示所在的右车道中车道和左车道 |
|
|
第n个电动自行车s的左车道 |
|
|
第n个电动自行车s的右车道 |
|
|
状态1,0,-1分别表示右转、直行和左转 |
|
|
第n个电动自行车当前车道上的期望速度 |
|
|
第n个电动自行车右转车道上的期望速度 |
|
|
第n个电动自行车左转车道上的期望速度 |
|
|
现在所处的区域 |
|
|
x–y平面上第n个电动自行车的当前位置 |
|
|
=3cells |
安全距离 |
在这两种策略下,有些电动自行车具有转向行为(如左转和右转),因此我们应该定义转向规则和信号相位。
- 转弯规则
图3是每个电动自行车左转/右转的示意图,这表明转弯电动自行车在到达停车线之前应选择其预期车道,因此,我们应定义转弯规则。转弯行为可分为三个阶段,即:
第一阶段:转向电动自行车S远离停车线。
第二阶段:转弯电动自行车S首先进入转弯区,然后选择预期车道,最后穿过交叉口。
第三阶段:转弯电动自行车S完成转弯。
在第一阶段和第三阶段,转弯电动自行车S的运动规律与直行电动自行车S相同,因此我们只需在第二阶段定义转弯规律,其中规则包括两部分,即:
1)当第n个电动自行车靠近停车线时
如果存在并且,,,则
,;
如果存在并且,,,则
,。
2)当第n个电动自行车进入交叉口时
如果,,则,;
如果,,则,.
在这里,我们应该给出以下注释:
1)),只能用于描述图2所示区域1中的电动自行车运动;
2))我们应该定义其他参数来描述电动自行车在其他区域的运动。
(2)信号相位
禁止红灯运行,信号相位对称,可分为1相位和2相位,即信号相位可简单定义如下:
- 如果,则
- 在相位1
如果,,则;否则.
- 在相位2
如果,,则;否则.
与现有的研究(尤其是模型[21,22])相比,提出的具有两种策略的模型可以描述信号区间的每个电动自行车模型。
图3。左转和右转的轨迹
3.模拟
在本节中,我们研究了每一个电动自行车的运动以及这两种策略对信号区间运行效率的影响,由于信号相位是对称的,所以我们只应探索1区和5区电动自行车的运动。另一方面,没有出现红灯运行和逆行,左转电动自行车的概率相对较低,因此我们不探索电动自行车在1区的运动。在进行数值试验之前,我们需要给出以下假设:
(a)空间轴的原点设为点,距1区边界200个单元。
(b)当电动自行车到达信号交叉口时,如果剩余绿灯时间不超过5秒,则应在停车线处停车
(c)使用探索流入对每个电动自行车轨迹的影响,是区域内流量的平均值1。
1.
首先,我们模拟了1区在三种情况下的每个电动自行车运动,即分别为500电动自行车/小时、1000电动自行车/小时和1500电动自行车/小时。数值结果分别如图4-6所示。从这三个图中,我们可以得出以下结论:
(i)在下游:电动自行车流大约是每个车道上的自由流,但是左/右车道上的流量比中间车道上的流量少,因为转弯电动自行车阻止直行电动自行车进入交叉口;当增加时,每个循环中穿过交叉口的电动自行车数量增加。
(ii)在上流:红灯时,每条车道上都会出现一些排队,但左/右车道上的排队比中间车道上的排队长,因为转弯电动自行车S阻止直行电动自行车S进入交叉口;当增加时,每条排队的长度增加。
(iii)当很小(如q平均流入量=500电动自行车/h)时,电动自行车流约为每条车道上的自由流,但每条车道上的一些排队发生在上游;由于转弯电动自行车s阻止直行电动自行车s进入交叉口,左/右车道上的拥挤比中间车道上的拥挤更严重。
(iv)在每个红灯期间,上游都会出现一些排队,而且排队长度相对较长,没有参考文献[21,22]中的任何策略;但在建议的策略下,排队明显变短,并且在每个信号周期内穿过区间的电动自行车S数量显著增加,这表明建议的策略可以提高信号交叉口的运营效率。
接下来,我们
全文共13101字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[2227]

