
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
自动化集装箱码头低能耗AGV调度问题的双层规划模型
摘要—在本文中,我们设计了一种AGV(自动导引车)调度问题双层双目标模型,旨在减少能耗并提高效率。设计了双层启发式算法来求解该模型。数值实验表明,本文提出的模型可以进一步降低水平运输作业的能耗,同时优化作业效率。
关键词—AGV调度,能耗,双层规划,双层启发式算法
-
-
- 介绍
-
AGV(自动导引车)调度问题是提高自动集装箱码头的运营效率,这是一个典型的NP难题[1]。近年来,随着世界集装箱运输量的增长,绿色和低能耗已成为其核心目标[2]。AGV调度问题模型基于传统的卡车调度问题模型,这些模型大多使用CMIP(复杂混合整数规划)模型进行调度任务分配过程[3]。但是,使用CMIP模型很难对AGV详细的运输过程进行建模[4]。因此,许多研究人员开始使用双层规划模型来建模AGV调度问题[5],可以同时对AGV调度问题的任务分配和详细的运输过程进行建模[6]。
降低水平运输作业的能耗主要从以下两个方面着手:(1)为了进行调度优化,例如He [7]建立了QC(QC),卡车和YC(码垛机)调度问题的整数规划模型。减少集装箱码头的能耗。(2)对于详细的运输过程,例如He等。[8]提出了在终端之间共享卡车的操作模式,以减少卡车的数量和能耗。
在这项工作中,我们旨在介绍和评估一种优化方法,以减少能耗并提高自动化集装箱码头的效率。因此,我们试图设计一种在上层和下层模型中均具有低能耗目标的双层编程模型,而不是常规地优化其运行效率。该模型不仅从任务分配过程中优化了这些目标,还从AGV的详细运输过程中优化了这些目标,并更具体地分析了功耗影响因素。我们发展
国家自然科学基金(No.71271041)。
双层启发式算法扩展了双层GA(遗传算法)[9]以解决该问题。使用基于现实世界数据的实例,我们证明了该模型有效地降低了AGV能耗,并使集装箱码头的运营保持高效。
本文的其余部分安排如下:第二部分提出了AGV调度问题的描述。第三节为双目标双层模型提供了数学公式。第四节提出了一种双层启发式算法来解决数学公式。第五部分提供了数值实验和结果分析。第六节提供了一些结论。
-
-
- 问题描述
-
- 问题描述
本文中的问题可分为任务分配过程(问题U)和AGV详细运输过程(问题L)。这些问题描述如下。
问题U:在船舶到达码头之前,集装箱码头将接收进口集装箱和出口集装箱的信息。根据此信息,终端将为进口容器分配部分,并找到出口容器的位置。根据这些位置和信息,将计算QC容器操作计划和YC堆场操作计划。根据这些操作计划,终端的GIS信息以及有关操作设备的信息,需要所有AGV的有序任务队列,以(1)最小化总体水平运输操作的能耗,以及(2)最大化整个码头运营的效率(最大限度地减少总工作时间)。
问题L:根据终端的GIS信息以及问题U计算的所有AGV的有序任务队列,要求AGV的运输路径(1)最小化AGV的能耗,(2)最小化AVG行进路径的长度。
-
参数表示
- 基础设施和GIS信息
V:一组在GIS中通过路线连接的点,例如道路交叉口,道路尽头和AGV停车点:v1和v1是v的水平坐标。
m
m
m
V1:质量控制点。
V2:YC所在的街区的停车点。
E:直接邻接矩阵,其中
- 操作设备参数
N1:QC的数量,其中nq是QC。
N2:YC的数量,其中ny是YC。
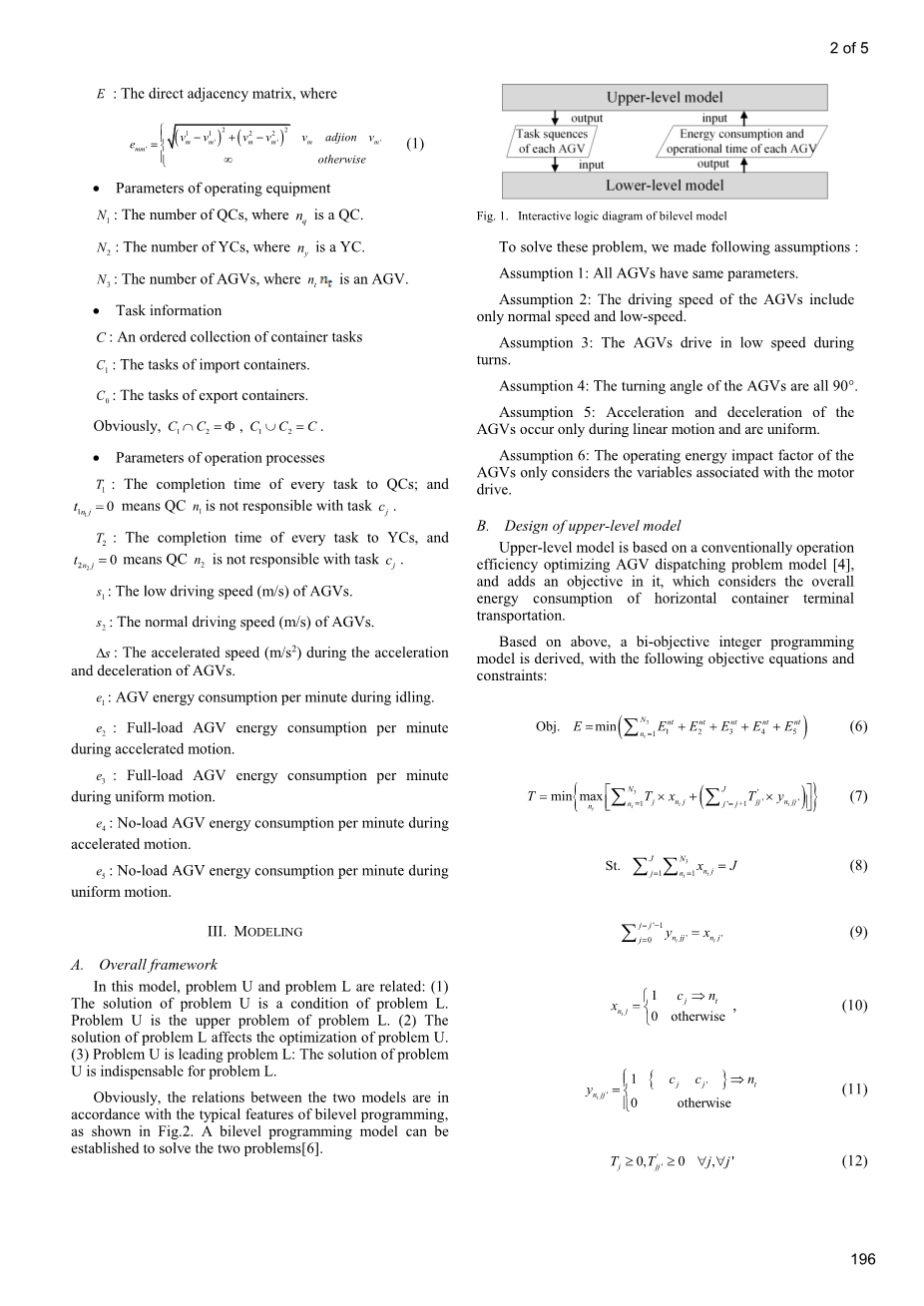
图1.双层模型的交互式逻辑图
为了解决这些问题,我们做出了以下假设:
N3:AGV的数量,其中
- 任务信息
是一辆AGV。
假设1:所有AGV具有相同的参数。
假设2:AGV的行驶速度仅包括正常速度和低速。
C:容器任务的有序集合
C1:导入容器的任务。
C0:导出容器的任务。显然
- 操作流程参数
T1:每个任务完成质量控制的时间;和
t1n j0表示QC n1对任务cj不负责。
1
T2:每个任务到YC的完成时间,以及
t2n j0表示QC n2对任务cj不负责。
2
s1:AGV的低行驶速度(m / s)。
s2:AGV的正常行驶速度(m / s)。
s:AGV加减速时的加速速度(m / s2)。
e1:空转时每分钟的AGV能耗。
e2:加速运动期间每分钟的满载AGV能耗
e3:在匀速运动中每分钟满载AGV能耗
e4:加速运动中每分钟的空载AGV能耗
e5:匀速运动时每分钟的空载AGV能耗
假设3:AGV在转弯时低速行驶。
假设4:AGV的转向角均为90°。
假设5:加速和减速AGV仅在线性运动期间发生并且是均匀的。
假设6:AGV的运行能量影响因子仅考虑与电动机驱动器相关的变量。
B.上层模型的设计
上层模型基于常规的运营效率优化AGV调度问题模型[4],并在其中添加了一个目标,其中考虑了水平集装箱码头运输的总体能耗。
基于上述,推导了一个具有以下目标方程和约束的双目标整数规划模型:
-
-
- 建模
-
- 总体框架
在该模型中,问题U和问题L相关:(1)问题U的解决方案是问题L的条件。
问题U是问题L的最主要问题。(2)问题L的解决方案影响问题U的优化。
(3)问题U主导问题L:问题U的解决方案对于问题L是必不可少的。
显然,两个模型之间的关系是根据双层编程的典型特
新台币
如图2所示。可以建立一个双层编程模型来解决这两个问题[6]。
在这里,目标Ent , Ent , Ent , Ent , Ent
是AGV 的不同能耗状态, Tj和Tjj是AGV的满载和空载运输时间, 约束(8)表示一个任务只能分配给一个AGV,(9)表示任务执行顺序约束, (10)xn j是任务分配的决策变量. (11) yn jj 是分配给每个 AGV,(12),(13)是范围约束。
C.下层模型的设计
下层模型基于优化AGV路由的常规运动效率。模型[10],并在其中添加一个目标,该目标考虑任务的一个AGV能量消耗。
假设AGV Nt 从o点移动到d点,行驶速度,行驶路径和发动机状态之间的关系如图2所示。此外,还有两种车辆负载条件:满载和空载。因此,AGV的单位时间能耗分为e1,e2,e3,e4和e5,t在引擎中的引擎状态序列可以表示水平运输作业任务, 通过路径矢量R, R R R., 其中 Rj为AGV满载行驶路径,Rjj为空载行驶路径。基于向量R,该模型计算了网络的时间、距离和能耗.
在此基础上,提出了一种双目标AGV路由方案。模型如下:
1 2 1 2 4
在此,目标(14)表示最小能耗目标,(15)表示最短路径目标。约束(16)表示水平运输任务cj与QC之间的对应关系,
(17)表示任务和YC之间的对应关系。约束(18),(19)表示每个水平运输任务的起点和终点。约束(20)
(21)代表满载路径和空载路径。约束条件(22),(23),(24)和(25)是转弯决策变量的计算方法。约束(26),(27),(28),(29)和(30)是AGV减速时间的计算方法。约束(31)和(32)是
算法从上层模型的遗传算法开始。遗传操作后,将由基因组成的决策变量Xnj和Ynjj引入下层模型的蚁群算法中,根据上层模型的遗传算法计算出的解基因。
下层模型的蚁群算法利用蚁群算法的步骤生成Rj和Rjj。ACO计算每辆AGV的运输时间和行驶距离。遗传算法将蚁群算法的这些结果作为计算基因适应度的重要参数。
V.数值试验和结果
- 实验实例
基于实际数据的实例用于证明模型的有效性。任务信息包括根据实际数据随机装载和卸载600个容器。实例的详细数量显示在表I中。
要计算帕累托集解,首先,设置10.5
并分析步长为0.1的[0,1]之间的2值。主要结果如图4所示。根据该图,20.4表示高层模型的帕累托集解。
其次,设置0.4并分析之间的值
- 数值实验结果
满载和空载路径长度。约束(33), 2
(34),(35),(36)和(37)是计算AGV能耗的方法。
iv.算法设计
总体算法过程框架如图1所示。
3.设计GA解决问题U,设计ACO(蚁群优化)解决问题L。
根据对实验结果的分析比较,如图5和图6所示,仅考虑效率结果,工作效率的优化结果就可以达到94%。此外,能源消耗可减少11.65%。该模型可以有效地减少(1)AGV在低速条件下的行驶距离,(2)空载条件下低速时的能量消耗22.29%和(3)满载情况下低速时的能量消耗负载条件降低了72.2%。因此,上层模型可以有效地解决优化目标问题。
|
能耗运行时间 0.1 0.3 0.5 0.7 0.9 ε2 |
距离 能源消耗 0 0.2 0.4 0.6 0.8 1 ε1 |
||
|
(a)上等结果2 |
(b)1的下模结果 |
|
能耗运行时间 0.1 0.3 0.5 0.7 0.9 ε2 |
距离 能源消耗 0 0.2 0.4 0.6 0.8 1 ε1 |
||
|
(a)上等结果2 |
(b)1的下模结果 |
表一。 数值实验实例
27.0
9
27.4
9
5.07
5.65
满载 空载
e5 e3
e2 e4
运输距离(公里)
能耗(千瓦时)
仅效率模型
|
实例类型 |
参数和值 |
|||
|
参数<!-- 剩余内容已隐藏,支付完成后下载完整资料 资料编号:[240567],资料为PDF文档或Word文档,PDF文档可免费转换为Word |
||||

