英语原文共 11 页
提高具备ABS和半主动悬架的车辆 在颠簸路面上的制动性能
Herman A. Hamersma, P. Schalk Els
机械与航空工程系, University of Pretoria, 南非
Received 26 May 2014; received in revised form 25 September 2014; accepted 28 September 2014
Available online 15 October 2014
摘要
利用执行器和控制系统来改善车辆动力学中的行驶性、操纵性和安全性等方面取得了较快的进展。车辆乘坐舒适性的优化推动了半主动悬架系统的发展,防抱死制动系统(ABS)在不丧失方向控制的同时极大的改善了车辆制动性,这些进步总体上改善了车辆和乘员的安全性,但也会有一些不利的影响。比如,在颠簸路面上安装ABS的车辆制动距离明显增加,越野车行业受到的影响最为严重。本文研究了弹簧和阻尼器特性对在坚硬颠簸道路上运动多用途车(SUV)的制动性影响,该方法是基于仿真的,使用经过实验验证的SUV整车模型,利用Adams、Matlab和Simulink中进行协同仿真,仿真是在比利时铺路和平行波纹(或搓板路)的测量道路剖面图上进行的。结果表明悬架系统对制动性有明显的影响,导致停车距离差异达到9m。
关键词:越野车;ABS系统;半主动悬架;轮胎造型;多体动力学建模
1.引言
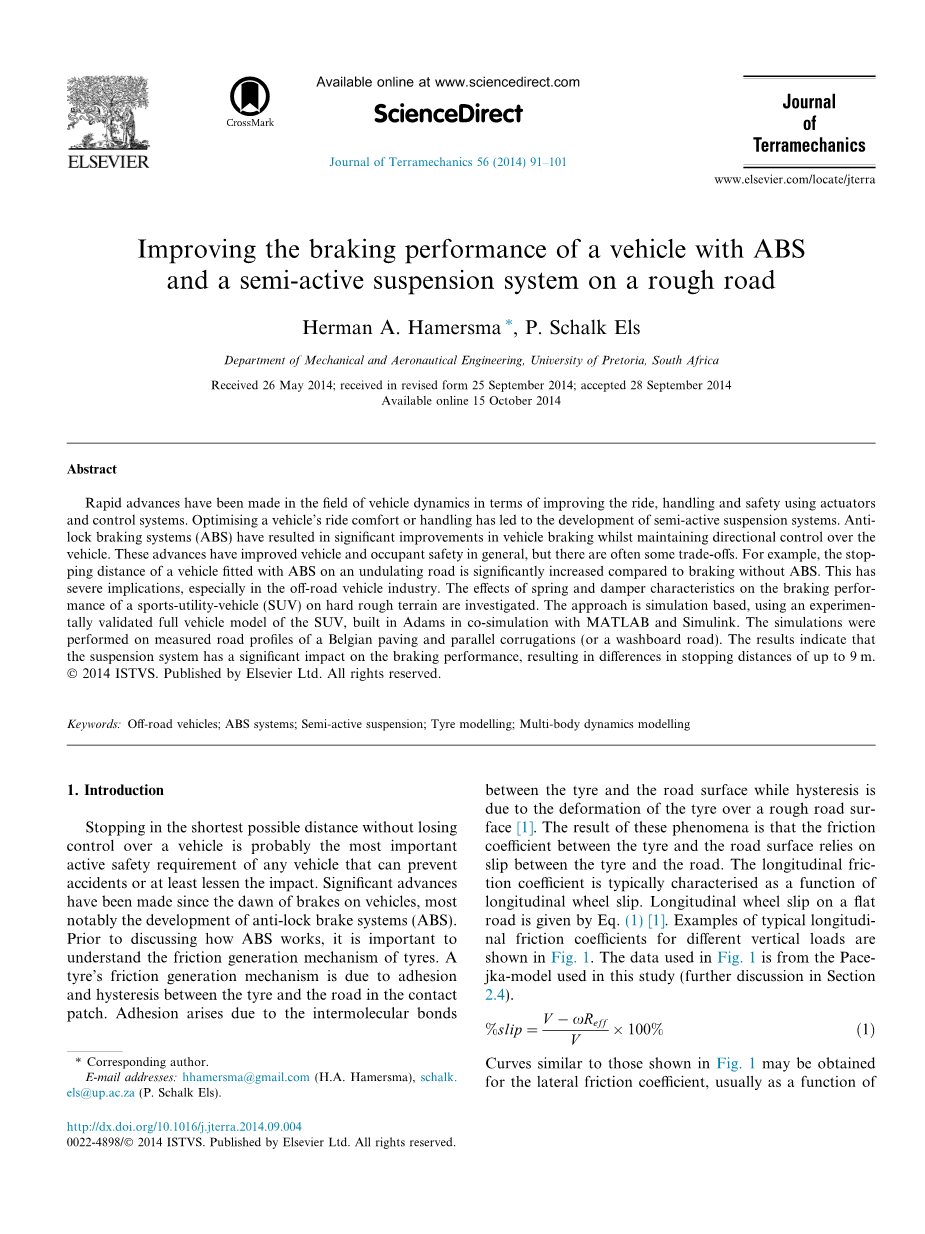
在汽车的主动安全性能中,为了避免事故发生或者至少减轻事故的影响,不丧失转向并在最短距离内停车被视为最重要的安全性能。车辆制动器自出现以来已经取得了重大进展,尤其是防抱死制动系统(ABS)的发展。在讨论ABS如何工作之前,重要的是了解轮胎摩擦的产生机理。轮胎摩擦的产生是由于轮胎与道路之间的粘附和滞后造成的。粘附是轮胎与路面之间的分子间键而产生的,而滞后是由于轮胎在粗糙路面上的变形[1]。这些现象表明,轮胎与路面之间的摩擦系数依赖于轮胎和道路之间滑移。纵向摩擦系数通常表征为纵向车轮滑移的函数。平坦路面上的纵向车轮滑移由方程式(1)给出 [1]。不同垂直载荷的典型纵向摩擦系数示例如图1所示。图1中使用的数据来自本研究中使用的Pacejka模型(在章节2.4中进一步讨论)。
(1)
可以针对横向摩擦系数获得类似于图1中所示的曲线,通常作为侧滑角的函数。 从图1可以得出结论,以大约15%的纵向滑动制动可以得到最大制动力,从而获得最高减速度和最短制动距离。 然而,当轮胎产生最大纵向力时(例如在制动期间),轮胎不能产生任何横向力[1]。由于横向力对于控制车辆的横向稳定性是必要的,因此在最大纵向力下制动可能导致不可控制或不稳定的车辆。 这推动了ABS的发展。
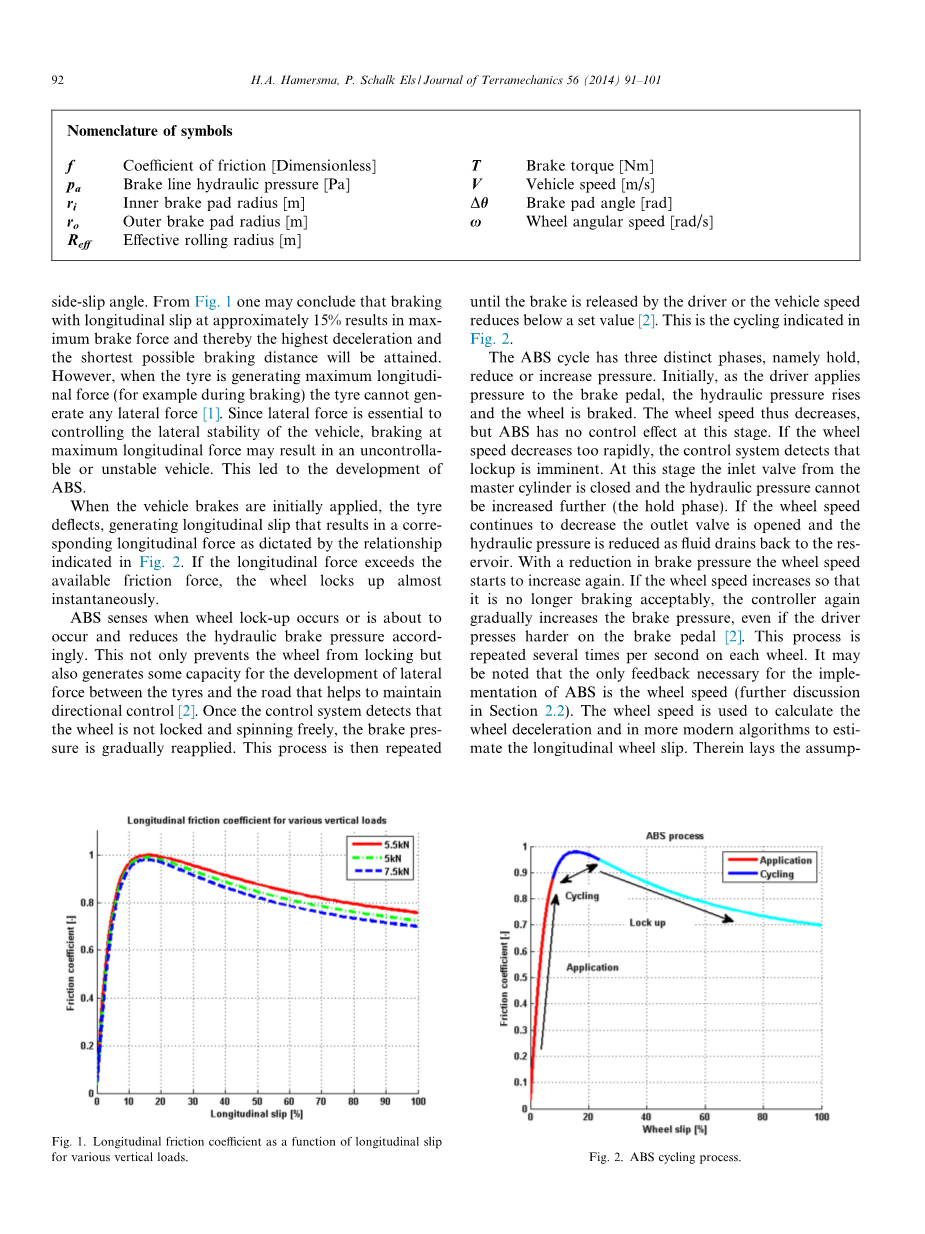
当最初施加车辆制动时,轮胎偏转,产生纵向滑移,进而产生相应的纵向力,如图2中的关系所示。如果纵向力超过可用的摩擦力,则车轮几乎瞬间锁定。
图1 各种垂直载荷下纵向摩擦系数与纵向滑移率的关系
ABS在车轮发生锁定或即将发生锁定时进行检测并相应地降低液压制动压力。 这不仅可以防止车轮锁定,还可以在轮胎和道路之间产生一些横向力,从而有助于保持方向控制[2]。一旦控制系统检测到车轮未锁定并自由旋转,则逐渐重新施加制动压力。 然后重复该过程,直到驾驶员释放制动器或车速降低到设定值以下[2]。 这是图2中所示的循环。
图2 ABS循环过程
ABS循环有三个不同的阶段,即保持,减少或增加压力。最初,当驾驶员向制动踏板施加压力时,液压上升并且车轮被制动。因此车轮速度降低,但ABS在此阶段没有控制效果。如果车轮速度下降得太快,控制系统会检测到即将发生锁定。在此阶段,来自主缸的进气阀关闭,液压不能进一步增加(保持阶段)。如果车轮速度继续降低,则打开出口阀,流体排回储液器,液压降低。随着制动压力的降低,车轮速度再次开始增加。如果车轮速度增加使其不再接受制动,则即使驾驶员在制动踏板上施加更大的压力,控制器也会再次逐渐增加制动压力[2]。在每个车轮上该过程每秒重复几次。可以注意到,ABS所需的唯一反馈是车轮速度(第2.2节中进一步讨论)。车轮速度用于计算车轮减速度,在更现代的算法中用于估算纵向车轮滑移,其中假设有效滚动半径保持相对恒定 —这意味着路面相对平滑并且纵向滑移用方程式(1)确定。
在颠簸地形上行驶时,例如比利时铺路或带有波纹的肮脏道路(搓板路),ABS系统可能没有益处。不仅有效的滚动半径由于路面的起伏而改变,车轮的垂直和扭转动态可能被激励到轮胎和道路之间的接触丢失或轮胎开始振荡的程度。如Adcox等人所讨论的,轮胎振荡对ABS系统的性能具有显着影响。[3]。轮胎力产生的磨合效应使情况进一步复杂化。Gillespie [1]描述了磨合效应,表明轮胎对阶跃输入的响应不是瞬时的,滞后与轮胎的旋转有关,通常需要在车轮的一半到一整圈之间达到稳态。轮胎上变化的垂直载荷(如在粗糙路面上行驶时的情况),进一步使ABS的最佳应用复杂化。当车轮负荷增加时,接触面的尺寸随变形的橡胶而增加。 “新”橡胶在产生显着的水平力之前,必须先变形,这会滞后于垂直载荷的增加。相反,当车轮负荷减小时,接触面积减小并且产生的力瞬间减小。此外,由于轮胎中的低阻尼,地形输入和来自ABS的周期性制动输入,可以激发固有频率(特别是扭转模式)。这个过程的净效果是减少制动力和增加停车距离[2]。
最初的制动测试是在平坦的道路和颠簸的道路上进行的,并且发现悬架的设置对平坦道路上的制动性能影响很小,而且在平坦路面适当调整悬架可以获得一些优势。然而,初步结果表明,在颠簸道路上的制动性能可以得到显着改善,研究将集中在粗糙路面上可能的改进[4]。因此,本文的研究问题可以定义为:通过改变悬架特性,可以改善装备ABS和半主动悬架的车辆在崎岖道路上的停车距离吗?已经进行的类似研究,主要局限于修改阻尼器特性或使用简化模型,如四分之一汽车模型和俯仰反弹模型[5]。目前的研究主要集中在严重起伏的道路上,其位移谱密度(DSD)类似于ISO 8608 D级道路,在测试车辆上,通过使用经过实验验证的整车模型,可调节弹簧和可调阻尼器设置。用于本研究的测试车辆是Land Rover Defender(参见第2.1节),而不是乘用车,因此车轮行程和车身旋转(特别是由于高重心,通常柔软的悬架和高轮胎轮胎而产生的侧倾和俯仰)可能发挥更重要的作用。
2.数学模型
图3 4S4悬架单元示意图
本研究采用的数学模型包括整车模型(包括半主动悬架),ABS控制算法以及道路和轮胎模型。
2.1整车模型
用作本研究实验平台的车辆是1997年的Land Rover Defender。Land Rover配备了一种称为“四态”半主动悬架系统(4S4)的液压气动半主动悬架[6]。4S4配有两个阻尼组件,配有旁通阀,每个支柱有两个气体蓄能器,带有一个电磁阀,用于隔离较大的蓄能器,如图3所示。两个气体蓄能器(一个容积为0.1 L,另一个为0.4 L)用作具有浮动活塞的空气弹簧,以分离气体和用于阻尼的液压流体。切换电磁阀以使用两个气体蓄能器使弹簧变软,切换仅使用小蓄能器使弹簧变硬。旁通阀用于绕过阻尼组件并获得高阻尼和低阻尼设置。如图3所示,两个旁通阀都打开用于低阻尼设置,两个旁通阀都关闭以实现高阻尼设置,而不管所选择的弹簧设置如何,最终结果是具有两个阻尼器和两个弹簧特性的半主动悬架系统。弹簧和阻尼器特性可以改为“乘坐舒适”模式,使用软弹簧和低阻尼,或使用硬弹簧和高阻尼的“操作模式”。弹簧和阻尼器的特性在图4和5中给出[7]。
Thoresson等人开发了4S4悬架单元的模型。[7]并包含在整车的Adams [8]和MATLAB / Simulink [9]协同仿真模型中。 完整模型的无约束自由度在表1中给出,前悬架和后悬架的图形表示(如在Adams中建模的)如图6所示[7]。在Thoresson等人的研究中可以看到实验验证。[7]。
图4(上) 4S4悬架特性
图5(下) 4S4阻尼特性
2.2 ABS算法
模拟模型中使用的ABS算法由Savitski等人开发。[10]。 该算法示意图如图7,在图7中可以注意到ABS算法使用纵向车轮滑移(使用方程(1)和车轮的角加速度计算)以确定何时将发生锁定。该算法使用固定阈值,并且不依赖于表面对算法进行修改。这样做是为了将对车辆制动性能有影响的变量数量减少,并且可以在将来的研究中解决。制动阈值设置为纵向滑移为0.15,对应于图1所示的最大纵向摩擦系数。
图6 Adams中模拟的前部(左)和后部(右)悬架
图7 ABS算法原理图
2.3道路剖面
模拟过程中使用的道路剖面由Becker和Els [11]测量。地形轮廓仪被称为“Can-Can 轮廓仪”,用于测量道路的垂直位移。Becker和Els [11]描述的地形轮廓仪已经升级,以提高地形剖面的分辨率,现在横向间距为33 mm,每纵向行程6.6 mm记录一个数据点。在Gerotek测试设施[12]中测量的各种道路剖面的三维模型在MATLAB中构建并用作Adams中的3D壳道路。 3D外壳道路使用3D轮胎接触模型(3D等效体积接触模型,参见第2.4节),计算轮胎与道路交叉的体积[8]。用于本次调查的两条道路剖面图是比利时铺路和在Gerotek测试设施的悬架轨道上找到的平行波纹[12]。图8和图9分别显示了比利时铺路的照片和测量的平行波纹的MATLAB图。
虽然比利时铺路和平行波纹都是粗糙的(Becker和Els [11]发现比利时铺路的位移谱密度(DSD)类似于ISO 8608 [13] D级道路),但主要区别在于车轮和悬架系统接收的垂直激励类型。比利时铺路的设计使得广泛的频率被激发,尽可能接近随机激发,尽管情况并非如此(Becker和Els [11]在DSD中发现了两个不同的峰值,对应于长度 鹅卵石和鹅卵石之间的差距)。 与比利时铺路相比,平行波纹不是针对车轮和悬架系统的随机激励。 激励是周期性的,模拟在磨损的土路上行驶。 平行波纹上的激励频率与车辆速度成正比。
2.4制动和轮胎模型
制动器被包含在Adams模型中,作为作用在车轮上的扭矩。 使用MATLAB函数确定扭矩是液压制动压力的函数(见方程(2)[14]),然后通过Simulink作为输入给予Adams模型。
(2)
图9 用于模拟的制动模型的验证
在实验验证方面,车辆装有接近开关以测量轮毂上的车轮角速度(每转60个脉冲)和制动管路中的压力传感器以测量所施加的液压。使用频率到电压转换器将接近开关脉冲转换为表示轮速的电压。制动器测试从大约80公里/小时到完全停止 - 因此制动器必须耗散整个车辆的动能。然后使用整车模拟模型进行模拟,使用测量的制动管路液压作为模型的输入,并且比较模拟和测量的车轮速度以用于验证目的。图10将实验测量的车轮速度与模拟的车轮速度进行比较,并且可以看出,模拟的和测量的车轮速度紧密对应,尽管在测量的车轮速度上存在一些重要的测量噪声。因此,仿真环境中使用的制动器模型被认为是通过实验验证的。用于该研究的轮胎模型是由Bakker等人开发的Magic Formula轮胎模型。[15]结合Adams [8]中实施的3D等效体积接触法,摩擦系数如图1所示.3D等效体积接触法计算轮胎与道路之间的交叉体积。从这个交叉点,该方法计算等效平面的有效正常穿透,有效的轮胎与路面接触
图8 平行波纹(参见彩色图像)
点和有效的道路摩擦。接触算法基于使用曲面细分三角形和胎体横截面的道路表示。然后使用到3D道路的一系列2D圆形接触(每个2D圆圈表示轮胎形状的相等部分)[8]。使用诸如FTire [16]等技术以及Magic Formula模型[17]的最新方案,可以对这种轮胎模型进行重大改进。这些参数化的轮胎模型数据尚不适用于安装在测试车辆上的轮胎,并且改进模型的开发和实验验证不属于本研究的范围。之前的一项调查发现,3D等效体积接触法在与本研究中要研究的道路类似的地
形进行协商时产生最佳结果[18,4] 。
3.仿真结果
通过使用四个气体体积和四个阻尼比例因子,来研究通过修改车辆的悬架特性可以实现的可能改进。较低的气体体积导致较高的弹簧刚度,较高的阻尼比例因子表明存在较高的阻尼。前后悬架的气体体积和阻尼比例因子分别变化,每个道路轮廓产生256个组合。为此调查选择的气体体积和阻尼比例因子位于物理悬架系统的末端。在气体充电过程中可以改变气体体积而不改变当前的硬件。通过用比例阀代替电流开关阀可以改变阻尼器设置,从而实现连续可变的阻尼设置。虽然所研究的一些悬架配置在此阶段在测试车辆上实际上无法实现,但调查的目的是通过在紧急停止期间激活ABS时改变悬架设置来确定在崎岖道路上的制动性能可能的改进。幸运的是,该模型提供了这些配置。初步研究仅使用物理上可达到的特性进行,但是识别显示车辆制动性能改善的模式是困难的,因此研究了更多的阻尼器和弹簧设置。正在调查的四个影响变量,即:
1.气体体积(或弹簧常数)。
2.阻尼比例因子(或阻尼系数)。
3.不同的前后悬挂特性。
4.不同的道路轮廓。
图11 比利时铺路上可视化制动距离示例(参见彩色图像)
逻辑和简洁地呈现多变量数据是一项挑战。不是将每个悬架配置表示为单个数据 点,而是将配置表示为3D空间中的线,如图11所示。线的颜色表示该特定配置的制动距离(以米为单位)。表2中给出了图11中所示的示例的配置。
4.结论和建议
本研究的目的是研究是否可以通过使用半主动悬架系统改善ABS在崎岖道路上的车辆的制动性能。使用具有半主动悬架的Land Rover Defender的实验验证的整车模型来研究两个起伏的道路轮廓的制动性能,即比利

