
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
控制系统实验室的六自由度机器人测试台
Muhammad Awais Arshad, Muhammad Majid Gulzar, Jawad Khalid Qureshi, Aamir Hayat
中央大学(巴基斯坦拉合尔旁)
工程学部
Lahore, Pakistan
Mohammad Shamir, Fawad Ahmed, Sadia Rasheed
国际传发公司
水电发展局
Lahore, Pakistan
摘要:为大学生设计和开发的一个6-DoF机器人测试平台,以学习机器人控制系统理论的概念。测试平台由两部分组成:6-DoF平台和球板平衡负载。在平台上的机器人操纵是通过使用反向运动学算法的旋转Stewart-Gough机制生成的。平台上的平板平衡负载固定在平台上。本文介绍了在标准控制系统实验室提供的通用测试床之间的比较。机器人平台和有效载荷的设计已经在MATLAB Simulink中用软件模拟进行了详细的测试。这项工作完整地解释了电气,机械和软件设计以及开发,测试和结果。
关键词:球板系统; 控制系统; 自由程度;旋转; 机器人测试床;斯图尔特
1.介绍
可以使用信息和系统理论来考虑,分析和控制动态系统(活生物体,电气和电子系统,机械系统,机电系统,工业系统,市场行为,生态学等等)。举个说明性的例子,驾驶员通过使用诸如交通堵塞,天气状况,道路状况,红灯监控,道路标志等输入信息来管理速度,加速度和方向盘位置来控制汽车。在控制系统理论的学科下研究与动力系统控制相关的概念。控制系统工程在广泛的科学和技术领域具有重要意义,适用于主要的先进系统,包括但不限于飞机,卫星,运载火箭,火箭,导弹,潜艇,鱼雷和汽车。由于其多样化的应用和工业意义,控制系统工程是电气,机械,机电,化学和航空航天工程专业学生的核心课程。工程学院开发控制系统实验室,供学生学习和实践控制系统理论。控制系统实验室配备了教育测试平台,并具有针对相关行业的特定应用。控制系统实验室中,一个良好测试平台包括一些传感器/传感器,执行器,车间,输入参考,输入滤波器和比较器。 最常见的测试床包括倒立摆,DC / AC。
双转子系统控制有点类似于直升机的控制,其中提供了两个不同的转子来控制光束的水平高度和方向。倒立摆被认为是一个标准的控制实验室设备,供学生用来通过不同的控制方案来稳定一个自然不稳定的系统。磁悬浮试验台通过控制通过电磁体的电流,利用电磁力在自由空气中的特定高度上磁悬浮球。2-DoF球板平衡系统也被用作控制系统实验室测试平台,其中球在两个自由度的重力和旋转力的作用下被控制在板上。球的瞬时位置可以通过触敏板或在板顶部的数码相机的帮助下检测。
前面提到的教育试验台对于基本理解线性控制系统理论中的基本概念很有帮助,但非常简单。 普通教育试验台不能挑战大学生的认知能力或精神运动能力。 另一方面,先进的工业机器人系统相当复杂,需要在运动学建模,算法设计,传感器数据处理,致动器指令和级联控制系统设计方面具有良好的专业知识。 考虑到上述工业要求,本文提出了一个控制系统实验室的试验台,它是普通简单化教育试验台和复杂先进工业系统之间的折中方案。
建议的测试床由两部分组成,即: 6-DoF平台和球板平衡负载。 如图1所示,球平衡平衡负载紧紧地固定在6-DoF平台的顶部。该测试平台的主题是移动测试平台,以便可以控制球自由放置在平板上的位置。 借助数码相机和相关的数字图像处理方案来检测球的瞬时位置。 固定在平台上的球板有效载荷可以执行旋转域(滚动,俯仰和偏航)范围为plusmn;10度的六种不同的操纵(滚动,俯仰,偏移,舵,摇摆和起伏),平移域为plusmn;10cm(旋转,哔叽和隆起)。
图1.具有滚珠和平板系统有效载荷的6-DoF机器人测试台
设备的突出特点包括现象学过程模型,运动学分析,控制系统设计,控制系统测试和数据可视化。 SIMULINK中的现象学过程模型帮助学生测试软件中的控制方案,并将其与实际的硬件行为进行比较。模型线性化可帮助学生简化复杂模型并获得流程的抽象视图。动态分析工具(如波特图,极点和零图),根轨迹技术在控制行为的可视化中扮演着重要角色。最重要的是这个实验室测试平台是工程和技术的学生贯穿工业控制系统设计和实际硬件实践方法的所有阶段的原则。此外,该试验台的设计目的在于复制,因为它只使用低成本的商用现货(COTS)设备。本出版物时该试验台的总生产成本低于100美元。
本文的主体详述了方法论和机器人体系结构。 机器人体系结构由电气和机械设计组成。 接下来是该测试平台的算法流程。 Paper结束于Simulink建模,测试和结果。
2.方法
制造业生产线上可用的大多数机器人操纵器都是由串联连接的机构构成的,即机构的连杆和关节长链相互交替。 并行连接是另一种类型,其中链接和关节从两个或更多个锚点并行工作; 这些连杆和关节将操纵器的基座与末端执行器连接起来。 图2说明了两种类型之间的区别。
图2.串行(左)与并行(右)操纵器
串联机械手在算法设计中非常简单,但通常需要额外的物理空间来执行特定的操作。另一方面,并行机械手在算法设计上相对复杂,但能够在物理约束边界内执行复杂的机动。早在开发先进机器人技术之前,Earl和Rooney就已经提出了许多可能的并联机械手的分类。在高级机器人中使用串行和并联机械手的组合是一种常见的做法。Hunt解释了带有串联和并联机器人的机器人操纵器。
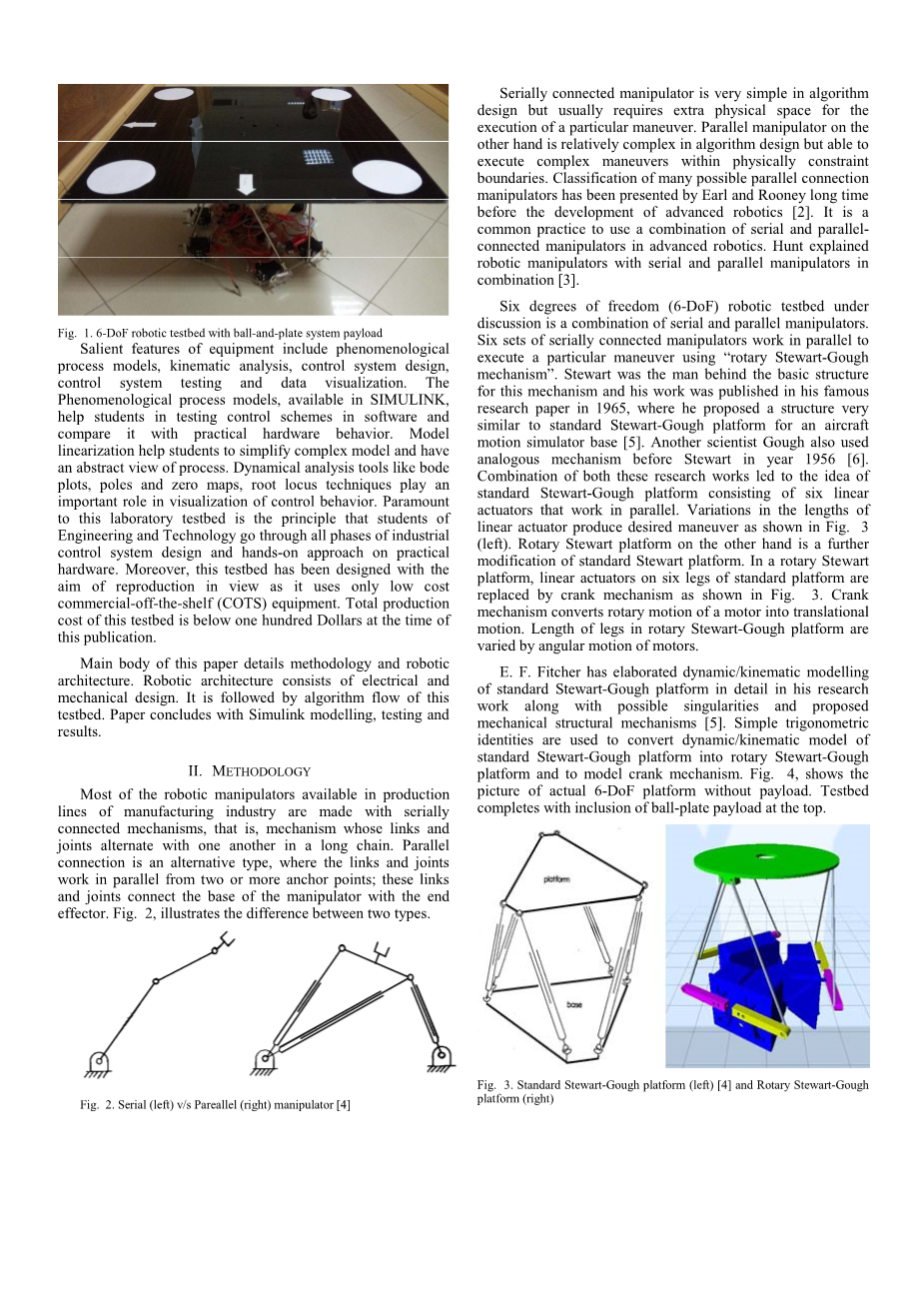
正在讨论的六自由度(6-DoF)机器人测试平台是串行和并联机械手的组合。使用“旋转Stewart-Gough机构”,六组串联的机械手并行工作以执行特定的机动。斯图尔特是这个机制的基本结构的创始者,他的工作发表在他1965年着名的研究论文中,他提出了一个非常类似于标准Stewart-Gough平台的结构,用于飞机运动模拟器基地[5]。另一位科学家高夫在1956年之前也使用了类似的机制[6]。这两项研究的结合导致了标准Stewart-Gough平台的构思,该平台由六个并行工作的线性执行器组成。如图3(左)所示,线性致动器长度的变化产生所需的操纵。另一方面,Stewart Stewart平台是对标准Stewart平台的进一步修改。在旋转斯图尔特平台上,标准平台六条腿上的线性执行器被曲柄机构所取代,如图3所示。曲柄机构将电机的旋转运动转换为平移运动。旋转Stewart-Gough平台中的腿部长度因电机角运动而变化。
E. F. Fitcher在他的研究工作中详细阐述了标准Stewart-Gough平台的运动学模型,以及可能的奇点和提出的机械结构机制[5]。 简单的三角恒等式被用于将标准Stewart-Gough平台的运动学模型转换成旋转Stewart-Gough平台并模拟曲柄机构。 图4显示了没有有效载荷的实际6-DoF平台的图片。 在顶部包括球板有效载荷后,试验台完成。
图3.标准Stewart-Gough平台(左)[4]和Rotary Stewart-Gough平台(右)
图4.没有有效载荷的6-DoF机器人平台
3.ROBOTIC架构
该试验台的6-DoF平台由一个固定的六边形底座,一个移动顶部和六个串联的机械手组成,连接固定的六角形底座和平行移动的顶部,如图4所示。平台平台上固定有平板平衡负载。用底座固定的电子板满足机器人测试台上电气硬件的所有电源要求。该平台的电子板还通过串行通讯电缆与个人电脑相连。这个机器人测试平台可以通过三个不同的来源进行输入测量。这个机器人测试台的第一个输入源是惯性测量单元。惯性测量单元(IMU)直接通过长电缆与电子卡连接。该IMU既可以用作参考控制指令,也可以用作反馈姿态传感器。作为参考控制指令单元,它为测试台提供了期望的态度。另一方面,IMU可以用移动板固定,以用作反馈姿态传感器。移动板的每次移动都可以通过此IMU反馈给控制器。该测试平台的第二个输入源是无线操纵杆。游戏杆数据通过与电子卡固定的蓝牙模块远程馈送给控制器。第三个信息来源是一个简单的数码相机。数码相机也被用作反馈传感器来检测板上的球位置。连接在数码相机和机器人测试台之间的个人计算机可捕获自由放置在平板上的球的图像。该图像在计算机中处理,并且板上参考位置的球偏移量通过串行通信发送到控制器。
- 机械设计
平台的机械设计包括六角形基座,电机支架,电机臂,heim接头,平台连杆和活动顶部。 六边形底座是从八毫米厚的丙烯酸板材切割而成,每边长度为七英寸。 如图5所示,通用伺服支架固定在六角形底座上,以便将伺服系统与基座连接起来。如图5所示,测试台底座不可移动,此测试台的所有电子元件都与底座固定在一起。 作为旋转式执行机构的六个伺服电机与支架连接在平台底座上。
图5. Robitic测试平台组件
从8mm压克力板上切下的电机臂也用电机轴固定,如图5所示。铝连接杆用作平台六角底座和平台顶部之间的支撑。 铝棒一端连接平台顶部,另一端连接电机臂(电机固定在底座六角板上)。 如图4和图5所示,电机臂的一端连接伺服电机的轴,另一端连接铝棒。
- 电气设计
机器人测试台的电气设计包括将220V,50Hz交流电源转换为12V,15A直流电源的开关式电源。该直流电源用于启动电子卡,满足该测试台上使用的所有电气设备的功率要求。该电子卡使用六个LM338线性稳压器驱动六个伺服器MG996R。舵机在最坏的情况下需要2.5A的电流,LM338线性稳压器能够驱动5A和5V的负载。电子卡使用MAX232 IC将该电路板与电脑连接起来,用于机器人和个人电脑之间的串行通信。该串行通信连接可用于监视机器人测试平台上的遥控数据到个人计算机上。它也可以用来从机器人测试台接收来自个人计算机的图像处理数据。电子卡包含两个蓝牙模块以及相关的电子电路。其中一个蓝牙模块用于接收来自操纵杆和其他蓝牙模块链路的机器人测试台与手持智能手机的姿态命令。来自手机传感器的数据可以直接与该测试床相连,因此手机可以用作该测试床的无线指挥单元。该电子卡提供一个插孔,通过数据线将惯性测量单元(IMU)MPU6050与平台相连。这个IMU既可以作为一个指挥单位,也可以作为反馈传感器来监控当前移动平台的姿态。
电子卡提供所有连接Arduino ATMEGA 2560控制器及其相关电源电路所需的连接器。 线性常规IC LM7809用于启动Arduino ATMEGA 2560电路板。电子卡可以防止过电压和过电流。所有伺服电机都通过此电子卡由LM338高电流调节器和板载Arduino ATMEGA 2560控制器供电。
4.ALGORITHM流程
图6描述了6-DoF机器人平台的算法流程以及球板平衡有效载荷。算法从程序初始化开始,其中定义了初始化的所有参数。在程序初始化时,还要在板上跟踪球的轨迹。控制器增益参数也是程序初始化参数的一部分。
在程序流程的下一个阶段,连接到外部计算机的低分辨率数码相机捕捉到球上的图像。数码相机的低分辨率有助于提高算法的计算效率,但代价是定位精度轻微下降。图像在二进制域处理,以找到板上球的瞬时位置。该位置信息通过串行通信发送到机器人平台上的微控制器。
微控制器程序通过外部计算机串行接收位置信息后执行三项主要任务。首先,它将反馈传感器的位置信息与预馈入轨迹进行比较,以计算位置误差并应用滚珠和平板PID控制器来计算所需的滚动和俯仰机动。其次,它计算旋转斯图尔特平台所需的电机角度机动,以实现适当的滚动和俯仰。 它使用旋转Stewart平台的反向运动学模型和伺服电机PID控制器来完成第二项任务。
图6.包含平台和有效载荷的机器人测试台的算法流程
最后,所有伺服电机都由微控制器程序命令执行上述计算机动。上述任务的完成导致了机动操纵。在重力的作用下,球的位置发生变化,然后通过数码相机进行图像采集,以进行下一次迭代,并且过程重复进行。算法流程的所有阶段都可供学生完全访问以供实验使用,学生可根据学习需求更改此测试平台。
5.软件模拟
模拟试验台已在Simulink中进行,并采用自上而下的方法进行解释,首先从球形平衡有效载荷的整体画面开始,然后在图7和图8所示的“滚动,俯仰控制”模块内部安装机器人平台。一个球可以在预定位置被控制在板上,其中两种类型的板操作围绕其旋转轴线即横摇和俯仰。另一方面,旋转6-DoF平台可以提供六种类型的机动(滚动,俯仰,偏航,摇摆,哔叽和起伏),非常适合这种特殊的有效载荷。级联控制策略已经用于外部控制回路规定球板平衡有效载荷的滚动/俯仰要求,而内部回路满足外部回路规定的要求。内部回路利用Rotary Stewart-Gough平台的反向运动学算法和PID控制来满足这些要求。
球可以在球板平衡系统中沿平面上的两个轴移动。如果球沿平面两轴的运动被认为是独立的,它们可以独立建模和控制。(1)中所示的二阶传递函数可以模拟沿每个轴的球移动。 其中R(s)和theta;(s)代表拉普拉斯分别将球的位置转换成板和板的角度。如图7所示,级联控制方案的外部回路包括用于滚动和俯仰的球—板系统模型和PID控制。
(1)
图7中的两个“步骤”块表示沿板的两个轴的球的参考位置。两个PID控制块用于控制板沿板的两个轴的球位置。滚动,俯仰控制模块负责通过某种机构执行滚转/俯仰操作(在我们的案例中为旋转Stewart-Gough机制)。
图7.通过Stewart
全文共9963字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[16424],资料为PDF文档或Word文档,PDF文档可免费转换为Word

