
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
一种商业用途汽车的气动制动系统的鲁棒设计
景莱武,洪昌张,云青张,李平晨
华中科技大学,中国
摘要
空气制动系统与其他制动系统相比具有很大的优越性,因此已经得到了广泛的应用。但是,空气制动系统的容量和稳定性是由许多因素所决定的,而这些因素往往又是不确定的,难以对其进行准确评估。因此,有必要提高这种制动系统的稳定性。在本文中,一个空气制动控制系统的物理模型是由一个多领域物理建模软件AMESim所绘制并对空气制动系统进行了鲁棒性设计。首先,利用实验设计(DOE)的方法,得到了影响振动时间和压力的关键设计参数。然后,根据实验设计(DOE)的结果进行响应面回归,采用容差设计进行鲁棒设计。从中获取空气制动系统表现优异的那些关键参数的值,决定空气制动系统的最终鲁棒设计。
引言
制动系统直接影响汽车的安全性。因此,研究制动系统的鲁棒性是十分必要的。与液压制动系统相比,空气制动系统具有许多优点,比如空气制动系统在没有较大的踏板力或踏板行程下依然能产生较大的制动力以及在空气制动系统中对管路的处理更为简单等等。事实上,大多数拖拉机能够拖动的额定总重量(GVWR)已经超过19000磅,大部分卡车能够拖动的额定总重量也已经超过31000磅,大多数交通及城际巴士,约半数的学校巴士都配备了空气制动系统[1]。大多数从事商业用途车辆的空气制动系统主要由两个子系统组成,即气动子系统和机械子系统。气动系统包括压缩机、蓄气罐、脚踏阀(或制动阀)、气动制动线路、继电器阀、速放阀(QRV),和制动室等等。机械子系统从制动气室开始和包括推杆、调整臂、垫片、制动片、制动块等[2]。一般来说,空气制动系统的延迟时间比液压制动系统的要长,主要是因为空气压力的建立比液压的建立要慢很多。因此,本文主要对气动子系统进行研究。
事实上,压力响应的延迟时间将会对汽车制动系统的性能产生很大的影响。缩短延迟时间可以使汽车的制动距离较短,尤其是当汽车的初速度很高时。同时压力响应过快是汽车行驶过程中一个最重要且不可避免的工作条件。因此,汽车已经广泛使用了防抱死制动系统(ABS)。因此,缩短压力响应的时间是有必要的。另一方面,空气制动系统中的压力可能会急剧突然地变化,这反过来又会导致汽车严重的振动问题。我们定义为汽车的振动压力。汽车的振动压力应能达到最小,因为它不仅影响制动系统的工作性能,而且有时也会导致汽车产生很大的噪声。
许多参数相互关联,尤其是制动阀、继电器阀和管路等关键部件的参数,从而使得空气制动系统鲁棒性分析的数学模型非常复杂。在空气制动系统的气动子系统的一个非线性模型中,把制动室的压力与脚踏阀柱塞的位移联系起来且其中脚踏阀的供给压力已知[3]。但该模型为不包含管道的数学模型。Bowlin[4]开发的压力控制方案,可用于控制空气制动系统的响应,它还可以作为新兴技术的一部分,如商业用途车辆的自适应巡航控制系统(ACC)。
流体力传动和控制问题极其复杂。有些参数只能从经验方程中得到的,从而给模型[5]增加了误差。因此,基于这种数学模型对系统进行仿真很难达到准确的结果。由于气动制动系统的数学模型非常复杂且不完整,有时甚至无法得到结果。
然而,利用AMESim软件[6]对空气制动系统进行建模仿真非常方便。
实际上,这有许多不确定因素会导致产品设计产生很多的错误,比如制造或装配过程等等,因此对在不确定性因素下,空气制动系统的鲁棒性研究是有必要的。鲁棒设计已经发展到能够提高工业产品的质量和可靠性的水平,能够用来解决气动制动系统的稳定性问题。鲁棒性设计的概念由Taguchi在20世纪40年代末期最先提出,现在这项技术已成为众所周知的Taguchi设计[7,8]。现在,许多新的方法已被开发并应用于鲁棒设计,如有效面法(RSM)、公差设计方法等。
鲁棒优化可以通过捕获设计特征来得到。然而,无论设计特征如何,其目标函数和约束函数都是由它们的统计数据组成的。当利用有效面法(RSM)进行统计时,设计公式中的所有函数都可以用数学形式来表示,这就引出了一个简单的经典优化问题。过程中的关键步骤用来建立可靠的响应面模型以代替真实的统计数据[9]。一旦完成,容差模型可以进一步用于鲁棒优化。
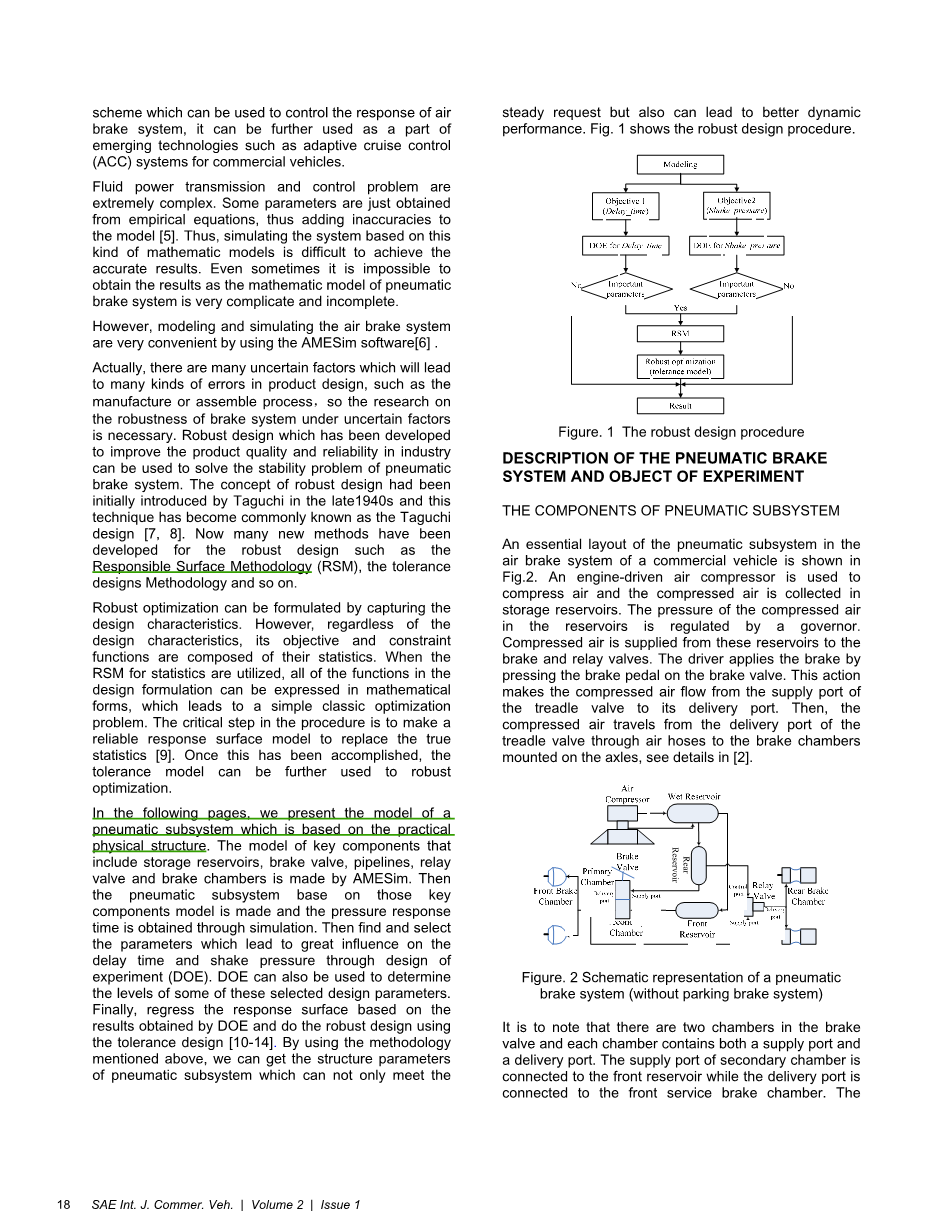
在接下来的介绍中,我们展示了一个基于实际物理结构的气动子系统的模型。这个模型的关键部件包括蓄气罐、制动阀、气动制动线路、继电器阀和制动室且均由AMESim软件所做。在此基础上建立了气动子系统,并通过仿真得到了压力响应时间。通过实验设计(DOE),找出并选择影响延迟时间和振动压力的参数。DOE还可以用来决定某些选定的设计参数的水平。最后,利用基于通过DOE的结果响应面和使用公差设计进行鲁棒设计[10-14]。利用上述方法,我们可以得到气动子系统的结构参数,既能满足稳定要求,又能获得较好的动态性能。图1展示了鲁棒设计的过程。
气动制动系统的描述及实验对象
气动子系统的组成
一个商业用途车辆的空气制动系统的气动子系统的重要布局如图2所示。由发动机驱动的空气压缩机用来压缩空气,压缩空气被收集在蓄气罐中。蓄气罐中压缩空气的压力由调速器调节。压缩空气从蓄气罐中供应到制动阀和继电器阀。驾驶员通过踩制动阀上的制动踏板来施加制动。这一行为使压缩空气流从脚踏阀的供应口流到它的输送口。然后,压缩空气通过空气软管从脚踏阀的输送口流到安装在轴上的制动室中,在图2查看详细细节。
图2 一个气动制动系统的典型代表示意图(没有停车制动系统)
需要注意的是制动阀中有两个腔室,每个腔室同时包含一个供给口和一个输送口。第二腔室的供应口连接到前蓄气罐,而输送口连接到前制动室。主腔室的供应口相应地连接到后蓄气罐。但是,主腔室的输出端口不直接连接到后制动室。主腔的输出端口连接到继电器阀的控制端口,用来加速响应速度。继电器阀除了控制端口外,还包括一个供给口、一个输送口和一个排气口。供给端口连接到后蓄气罐,输送口连接到后制动室。制动阀主室压缩空气仅作为压力信号使用。
气动制动系统的模型
制动阀
串连双回路制动阀的结构如图3所示。
图3串联双回路制动阀的结构
主电路由踏板力驱动,二次回路起继电器的作用。在正常工作条件下,来自初次输送的空气用来驱动继电器活塞,继电器活塞反过来驱动二次电路。当主电路失灵时,二次回路由踏板力直接驱动。当施加制动踏板时,主活塞首先关闭主排气口,然后打开主进气阀。这个阶段称为“进气阶段”。当输送气体的压力增加到可以平衡踏板输入力时,主入口阀关闭,主排气阀也保持关闭。这个阶段称为“平衡阶段”。当踏板松开时,主活塞上的平衡力也随之下降,使主活塞从主排气阀座上抬起,而输送回路中的空气被排放到大气中从而释放制动器。这个阶段称为“排气阶段”。除了继电器活塞在正常工作条件下是用来驱动的之外,二次回路的功能与初级电路类似。
制动阀的工作主活塞的控制方程由下列式子给出:
如果,
,(1)
其中:
如果,
,(2)
其中:
在公式(1)和(2)中,和分别表示一次活塞和一级阀总垫片的质量。、和分别表示脚踏阀柱塞、主活塞和主阀与初始位置间的位移。是主活塞在第一次排气口关闭之前的距离,同时也是主阀排气间隙的距离。、和分别表示阀杆弹簧、主活塞回程弹簧和主阀回程弹簧的弹性系数。和分别表示具有相同的预紧力。是主活塞在主输送口中暴露在压缩空气中的净面积,是主阀总垫片在主输送口中暴露在压缩空气中的净横截面积,是主阀总垫片在主供给口中暴露在压缩空气中的净横截面积。是通过阀杆弹簧和橡胶弹簧从柱塞传递到主活塞的力,是通过主阀从主活塞传递的力。、和分别表示环境温度、在主输送口中空气的温度和供给到主电路中的空气的温度。和分别表示排气阀和主阀的直径。m是流动空气的质量,s是主腔室的热交换面积,是供给到主电路中空气的压力,是在主输送口中空气的压力,是大气压力,其他符号是热力学的一些系数[6]。第二腔室的控制方程与主腔室相类似。图4表示了在AMESim软件中串联双回路制动阀的模型。
图4串联双回路制动阀的模型
从公式(1)可知,如果活塞的面积和阀回程弹簧的刚度已经确定,我们可以发现影响活塞压力响应和稳定的关键参数是主活塞回程弹簧的刚度、主阀和二次阀排气间隙。
继电器阀
继电器阀的结构与制动阀相类似,如图5所示。
制动阀与继电器阀的区别是制动阀的控制信号是踏板提供的力,而继电器阀的控制信号是来自于制动阀的压缩空气。继电器阀可缩短远离制动阀的后制动腔室的压力响应时间。当制动阀中压缩空气的流到继电器阀的控制口时,隔膜和顶杆打开阀门,使后蓄气罐的压缩空气直接流向继电器阀。流入制动室的压缩空气的压力随着控制口空气压力的稳定而达到稳定。当控制口空气的压力随着踏板释放而变低时,隔膜和芯棒复原使阀关闭,制动气室的空气排到大气中从而释放制动。图6表示了在AMESim软件中继电器阀的模型。
图6继电器阀的模型
因此,如果活塞的面积和阀回程弹簧的刚度已经确定,可以获得继电器阀的排气间隙。
制动气室
在本文中,我们把后脚踏弹簧制动器室简化成了前脚踏制动室(见图7)。设置制动气室的体积作为我们的研究重点。
(a)示意图表示 (b)模型结构
图7制动气室的模型
在AMESim软件中气动制动系统的简化模型
图8在AMESim软件展示了包括蓄气罐、串联双回路制动阀、继电器阀、制动气室和一些管道等关键部件的气动子系统模型。为了简化模型,我们使用脚踏制动室代替脚踏弹簧制动室。
图8气动子系统的简化模型
管道可能对气体响应速度有影响,我们给出了数学模型如下[10]:
(3)
其中:v表示气体的速度,D表示管道的直径,是压力降,L是管道的长度,表示气体的密度,和ff是摩擦系数。因此,管道直径是压力速度的一个重要设计参数。
串联双回路制动阀与继电器阀之间的管路(红线)直径小于其他管道(棕色线)的直径,且其他管道的直径相同。
实验对象
这有两个实验对象,一个是空气压力响应时间,另一个是压力的稳定性。以踏板行程作为输入信号,制动气室内的空气压力作为输出信号。图9给出了踏板行程的变化曲线。通过仿真,可以得到制动气室内的空气压力。图10是其结果示意图。
延迟时间可以通过如下公式表示:
(4)
在本文中,t1被设置成0.1s,t2被设置成2s。事实上,司机踩踏板的时间通常是不同的。所以t2分别被假定为不同的值为0.1s,0.2s ,0.3s。为了简化模拟,我们还假设t2=t4.
前室和后室都需要考虑其空气的压力不同。从公式(4)中,我们可以得到前室和后室不同的延迟时间,可以表达如下:
(5)
(6)
其中:下标f表示示前面和下标r表示后面。当下标i等于1, 2和3时,也就意味着t2或者t
全文共19934字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15068],资料为PDF文档或Word文档,PDF文档可免费转换为Word

