AGV localization algorithm for monocular vision based on planar projection
Abstract:Vision localization is an important problem in the field of AGV vision navigation. At present, the method of vision localization is mainly based on camera calibration to obtain camera intrinsic and extrinsic parameters. The process is complex and computationally large. This paper presents an AGV mobile robot monocular vision positioning method based on planar projection principle, set up the camera projection model, using plane principle to solve the pixel and space pointrsquo;s mapping relation. The experimental results show that the method is reliable, simple to compute and has good positioning accuracy. It can meet the requirements of AGV positioning system.
Key works: Monocular visual positioning; planar projection; AGV
0 Introduction
Vision localization is an important research problem in computer vision, widely used in robot autonomous navigation、robot localization、visual servo、camera calibration、target tracking、visual inspection、identification of goods and assembly of industrial parts, etc. With the rapidly development of computer vision in recent years, numerous technology and algorithm have sprung up, such as active vision, task oriented vision, vision based on knowledge and model, as well as the method of multi-sensor and integrated vision [1] . According to the classification of the number of lens, the computer vision is divided into monocular vision localization, binocular vision localization and multi-vision localization. Binocular stereo vision is based on the principle of parallax, which can obtain 3d geometric information of objects from multiple images. Compared with the locating method based on multi-camera model, monocular vision positioning is mainly manifested in using single image only can realize localization, and no image matching problem exists, therefore, it has fast processing speed and high positioning accuracy.
Traditional vision orientates the target by calibrating the internal and external parameters of the camera [2]. Computer calibration method can be divided into traditional calibration method, self-calibration method and calibration method based on active visual [3]. Traditional calibration method is the most commonly used calibration method now, and its procedure is: first, use calibration blocks with known structure and high machining accuracy as calibration objects; then, use a camera to take pictures of calibration objects; finally, calculate the mathematic relationship between the 2D image points and the 3D space points to complete the calibration, so that can obtain high accuracy results of localization with the reasonable design of calibration objects. The advantages of this method are the widely application among various camera models, high positioning accuracy, and the drawback is that the calibration process is complicated. Self-calibration method does not require calibration objects, but only the relationship of matching points in the calibration images taken by the moving camera. The calibration objects being not required, this method is widely applicated and flexible, but it is necessary to solve the multivariate nonlinear equation in the image matching, which reduces to poor robustness [4]. The calibration method based on active vision needs to predict the detailed motion information of the camera, which requires expensive equipment to record the motion trajectory of the camera and the experimental cost is higher [5].
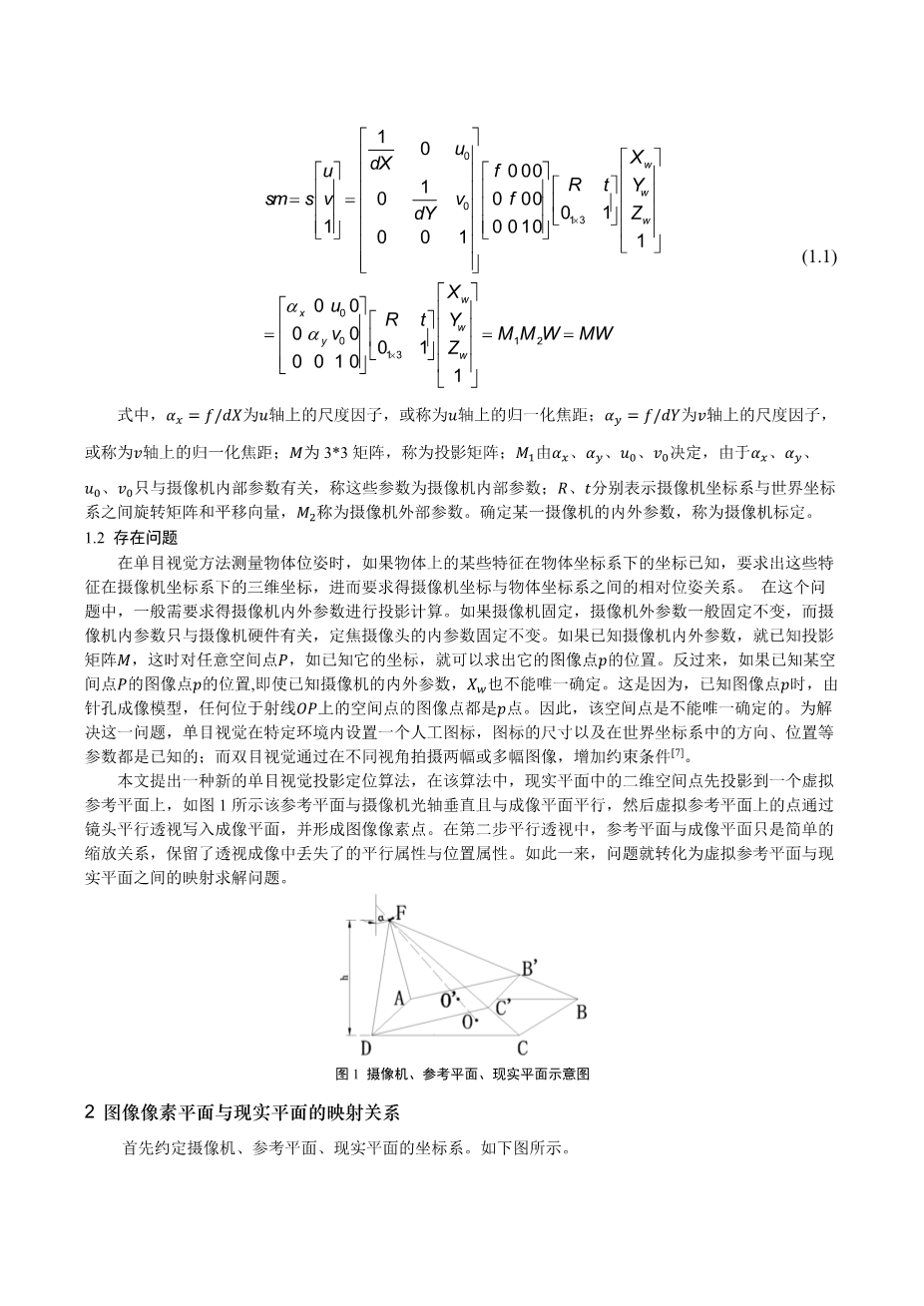
In this paper, a new simple and feasible algorithm is proposed for the monocular vision localization when we use monocular vision method to orientate the AGV on the flat surface. The algorithm does not need to calibrate the camera, also do not need to solve the internal and external parameters of camera, but analyze the geometric relationship between the image pixels plane with real space plane, concluding the mapping relation between pixels and actual point. Experimental results show that the proposed algorithm makes the positioning accuracy high and is efficiency, which provides a new perspective to research on the measurement and localization of computer vision, as well as AGVrsquo;s vision guidance, and have further study value.
1. Camera model and transformation of problem
1.1 camera model
This paper adopts the ideal pinhole camera as the model [6], besides, ignores the distortion in the actual camera. The Pinhole Imaging Model (PIM) is also known as the Linear Camera Model. In the image, the imaging position of point P (any point in space) can be approximated by the PIM, it means that point p , the projection position of any point P, is the intersection of line OP (attach optic center O with P) and the plane of the image. The pixel p and point P are represented by homogeneous coordinates (and). According to the PIM, the projection equation is:
where
the scale factor on the axis u, or called the normalized focal length on
the axis u;
the scale factor on the axis v, or called the normalized focal length on the axis v;
a 3*3 matrix, called projection matrix;
decided by alpha;x、alpha;y、u0、v0, called the internal parameters of the camera, which are only related to the internal parameters of the camera.
the rotation matrix and the translation vector between the camera coordinate system and the world coordinate system;
camera external parameters.
Determine the internal and external parameters of a camera, called Camera Calibration.
1.2 Transformation of problem
When measuring object pose in monocular vision method, if in the objec
全文共13159字,剩余内容已隐藏,支付完成后下载完整资料
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[10480],资料为PDF文档或Word文档,PDF文档可免费转换为Word

