
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
四旋翼飞行器建模与仿真
摘要
多旋翼飞行器已经被要求在很小的一块区域中稳定飞行的能力迫在眉睫。不幸的是,小型电动旋翼无人机通常具有很短的续航能力,因为其电池能量密度和电池组最大重量具有的局限性。同时,为了提高由一个变化的转子推力方向来提高它的可操作性。本文提出了一种新颖的四转子配置内燃机和变量使用螺距螺旋桨来增加它的耐力性能,而转子盘倾斜提高无人机的可操作性。简单控制律的初步设计也关联这个特别配置,同时测试几个基本动作。
关键词:多旋翼、旋翼、可变螺距螺旋桨、无人机
1.简介
对于任何飞行设备,包括无人机,任务能力强烈依赖于设备配置。在这方面,不仅能完成特殊任务也可以满足其他的基本功能。作为一个例子,遥控驾驶在城市地区的旋转翼飞行器垂直起飞,着陆和长时间悬停比固定翼飞行器更有用更容易实现。这显然是在严重限制设备的续航能力,尤其是电动驱动无人机。
在此框架下,多转子结构已在过去的几年中获得了越来越大的支持。多旋翼垂直起降无人机已被学术界的理想测试平台定义成新的控制规律,也是业界提出现在可以使用的设备在越来越宽的范围内实际应用。我们召回OS4的项目,由瑞士联邦研究所苏黎世[Bouabdallah (2007, 2004)];;X—堪培拉澳大利亚国立大学的[Pounds (2004); Hamel (2002)];;斯坦福大学的STARMAC II [Hoffmann (2007)].。
现在大部分的四旋翼飞行器,为了保持电池的重量在可接受的范围内实现基本功能,通常只有几分钟的飞行时间[Hoffmann (2007); Pounds (2004)。而内燃机的使用则可以提供更长的时间耐力但同时增加机械的复杂性。在这种情况下,力必须被分配到变螺距螺旋桨的旋翼通过适当的机械传动。同时,倾斜转子的可能性可能提供具有前所未有机动力。这特点是相关的,特别是对于无人机在起飞时重量的限制要求更高。最近关于研究倾斜转子的解决方案彰显了这种创新的配置的可行性[Senkul (2013); Ryll (2012)。
University of Bologna的飞行力学实验室(MDV实验室)和University of Salento合作开发这种新颖的四旋翼系统,变量螺距螺旋桨和转子倾转。这种配置基于一个由两位开发者Avanzini amp; Giulietti (2012).共同开发。使用哪一种内燃机将是新型无人机结构的研制的最后一步。这个这种创新四方转子的特点-将在下一节中更详细地描述。
2.飞机的描述
正如预期的那样,本文的重点是描述具有倾斜的四旋翼数学模型转子和可变螺距螺旋桨,驱动力由单一的内燃机提供。该模型适用于描述无人机动力学的稳定和控制反馈控制律。在此框架下,结构的振动和非定常气动效应将被忽略。常规多转子结构的动力学相对简单:无人机通过改变控制对螺旋桨的旋转速度。大多数时候,使用的转子成对出现。最常见的无人机被命名为四–转子或直升机,特点两对转子安装在一个简单的交叉端结构,或在正方形框架的角处。二转子顺时针方向旋转,另外两个旋转逆时针方向,例如在悬停时每个转子产生推力相当于无人机重量的四分之一零螺距,滚转力矩和完全平衡转子气动偏航力矩(图1)。偏航控制是由作用于两对转子气动力矩不平衡来实现,保持恒定的总推力。平移和俯仰控制力矩是通过以下方式获得的变化横向和纵向转子推力,分别(例如增加正向转子旋转速度,同时降低船尾安装的转子,由此来获得俯仰力矩)。ESA的转子也相当受欢迎,这种无人机结构由3对旋转螺旋桨组成。在这种情况下,三螺旋桨在一个方向旋转,剩下的三在相反的一个。请注意,传统的四-转子,在控制变量方面,欠驱动无人机,其中四个控制变量存在控制6机械自由度。
图1。4转子转动方向。
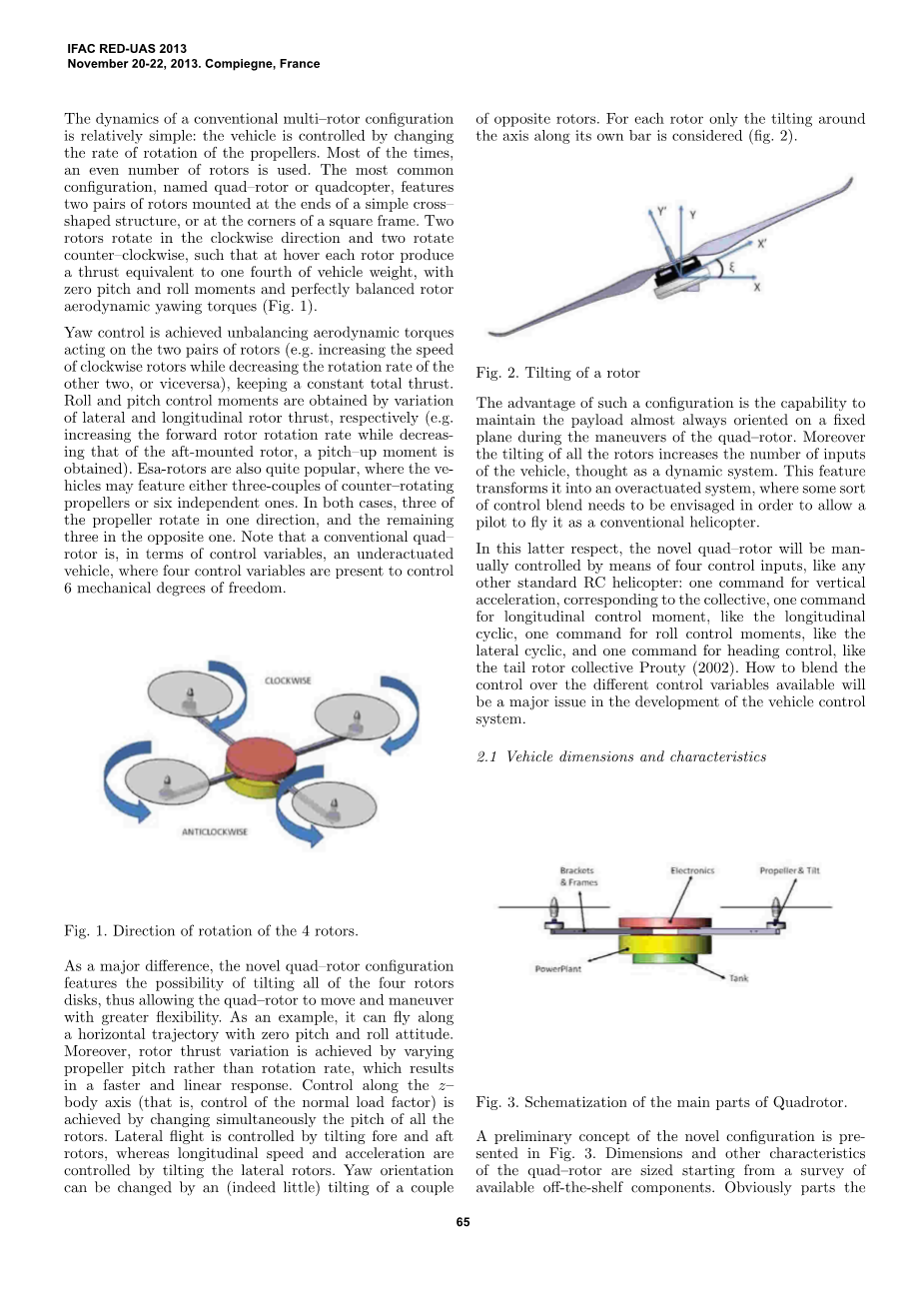
作为一个主要的区别,新颖的四旋翼配置具有能倾斜四个转子的磁盘,从而使四旋翼移动和机动具有更大的灵活性。举一个例子,它可以实现零俯仰和滚转姿态的水平轨迹。此外,转子推力变化是通过改变螺旋桨螺距,而不是旋转速度,这结果导致了更快的线性反应。通过改变z方向控制轴(即控制正常负载因数)来控制所有转子。横向飞行是通过前后倾斜来控制的转子,而速度和加速度由侧向转子倾斜来控制。偏航方向可以由一对倾斜的转子来改变相对位置。(图2)。
图2。转子倾斜
这种配置的优点是有效载荷总是保持在一个固定的四旋翼动力平面上 。此外,所有转子角度的输入都是作为动态系统平衡的关键。这一特点使它转换成过驱动系统。新的四旋翼飞行器将手动通过四个输入控制,如标准RC直升机:垂直加速度命令,作用于机体,纵向控制力矩命令,如纵向循环,滚动控制命令,控制横向循环。对不同控制变量控制的融合,将是汽车控制发展的一个主要问题。
图3. 旋翼的主要部分规划。
这部系统的初步概念图3
四旋翼的大小,尺寸及其他特性组成。一旦当配置明确,那么机架的结构布局将被根据实际需要设计。包括适当用内置铝合金管或碳纤维来增加它的强度、减少重量和制造复杂性与成本。发动机可以使用一个两冲程发动机Graupner OS SPEED 91 Hz-R 3C配备了约2.65千瓦的最大功率输出功率。水箱将位于引擎下面。电子设备便位于机身顶部,这是必须的,以避免电子设备与地面碰撞产生可能的冲击。
质量和惯性矩可以通过3D CAD模型来估算他的离散质量分布。
表1,总几何特性和总质量的分离据报道。有关评估几何和质量,转动惯量得到(表2)。
表1。四旋翼特性型值
单位整体尺寸 1360times;1360毫米250毫米
变距桨簇 50(x 4)G
电子 250 G
发动机和变速器 1900克坦G
水箱(满) 600G
铝合金支架 225(x 4)G
机架 100G
总质量 3950G
3.数学模型
3.1参考轴系统
为了研究机身刚度在空间中的运动动力学特性,最好的方法就是把无人机固定在一个框架上对它进行测试并记录。机身在地表的位置和方向这类数据起到了关键性的作用。
因此,需要去模拟四旋翼运动系统在空间两轴中的状态。一是以地球轴固定选择惯的性系统:第一和第二轴的框架分别面向北方和东方并始于地球表面。第二参考坐标轴的坐标系起源是放置在机架的重心上(图4)。
3.2运动方程
四旋翼的动力学行为可以通过一组刚体方程来表示,以机身体轴写为基准。方程中,假定身体轴线与四旋翼惯性主轴一致,纵向轴线XB平行于飞行器的支
架。
图4。用于仿真的轴系轴
Zb轴垂直于地面,无人机在悬停和Yb是完成 稳定的姿态。
大部分的四旋翼质量在数量和分布上被假定,即燃料消耗质与量变化相关。
结果这个假设是质量和惯性张量都是常量。
刚体动力学方程组:
惯性张量定义的方程式。
通过无人机速度矢量和姿态角速度omega;B计算出在地球惯性坐标系中的速度是计算的速度(3):
该TBE旋转矩阵变换矢量从惯性地球轴架到非惯性矢量[Dreier (2007)].
顺序是Psi;关于Z轴旋转、Theta;关于Y轴旋转,Phi;关于X轴旋转
E1是:变换矢量omega;B是矩欧拉角在时间导数上的向量[Dreier (2007)].
E矩阵的逆矩阵提出了一个Theta;等价于plusmn;pi;2 rad的数学奇点。在本文中态度条件不考虑,仍保留这种描述。简要的方程(3)显示惯性机体的速度和机架速度之间的关系,无人机旋转速率与欧拉角之间的关系,来定义四旋翼飞行器的姿态。
现在,状态向量X的动态描述可以定义为四旋翼动力学和运动学的系统关系。
状态向量的元素是:
(1)位置:PE =(N,E,D);
(2)态度:AE =(theta;,phi;,psi;);
(3)速度:VB =(U,V,W);
(4)角速度:omega;b=(P,Q,R);
两运动方程和两个位置和姿态运动方程可改写分离状态向量元素的导数。
运动力学的两个矢量方程相当于六个标量方程组(8)。
方程式中:
3.3 四旋翼上的力和力矩
外力和力矩的矢量来自包括机身部件产生的重力和重力力矩。这些组件可以列为:
(1)转子;
(2)发动机;
(3)无人机机架;
所有这些向量定义在身体固定框架内。
机身轴心重力矢量如下。
重力施加在四个转子CG上的力在任何时刻都不产生作用。
作用在机体上的力假定为就是作用在四旋翼机体上的力,它是沿固定机架坐标系三轴方向上阻力的三个分量。CG和机身气动中心之间的距离是零。阻力的效果相当作用在一块相当于平板上[Dreier (2007)]。
三等效平板面积:Xuu,af , Yvv,af , Zww,af 为常数。转子带动的速度影响被忽略。
转子数学模型
计算转子产生的气动作用,引用自MT和BET的经典理论结果[Dreier (2007); Leishman (2006)];
感应转子速度,假设,在旋盘电机上的整个区域都是恒定的。空气是不可压缩的。MT理论的结果就是,由于转子产生的推力T与感应速度Vi有关,所以推力系数CT是流入比lambda;i。(方程式。(15)及((16))
用下标R表示一个参考帧,其原点位于转子盘的中心。uR 和 wR是转子中心的速度,分别平行和垂直于转子盘,vi迭代计算。
BET定义了转子的空气动力学理论,一旦计算出感应速度他们就可以被评估。所有的作用都被定义在固定在转子盘中心的基准架上。动作有:推力T,阻力H,滚转力矩R,扭矩 Q.
转矩和滚转力矩对转子的旋转方向有帮助或者阻碍。
转自空间动力系数的方程定义[Padfield(1996); Bouabdallah (2007)](19)。
在方程(19)的旋翼厚度sigma;,剖面升力曲线斜率Clalpha;,转子前进比mu;,转子上比 mu;z,叶片扭角theta;tw , 叶片的平均阻力系数CD。
转子的中心不是位于四–转子CG上:所以向量FR 产生力臂之间的距离是CG和转子中心。
最后产生的是螺旋的力矩是[Pounds (2008); Hamel (2002)]:
3.4发动机数学模型
四–转子发动机是一个二冲程的发动机,轴Omega;的速度与转子的速度成正比。齿轮比是tau;
针对转子发动机的动力特性和发动机应用在机架上的反力矩的大小,必须要去研究清楚发动机轴的力学性能。如果忽略角加速度R˙。那么由方程[德雷尔描得到的轴的动力学结果是极其相似的[Dreier (2007)]::
Qrotor是四转子分别乘以气动力矩传动比的总和。Qeng是由发动机提供的扭矩。
假定发动机在几乎恒定的速度工作,因此气流的位置决定了他的飞行功率(delta;T)。使发动机控制气流变量使它发生偏转(delta;T)。因此,发动机功率被定义成正比的偏转阀。
轴的加,减速机身上扭矩的大小的作用。
3.5系统的输入
通过控制无人机的速度,位置和姿态:
(1)转子叶片theta;0垂直飞行
(2)转子xi;lat的前后倾斜来控制飞行器的侧飞
(3)倾斜的其他两个转子xi;lon使得飞行器纵向飞行
(4)一对相对的转子倾斜(或另外一对),则分别往相反的方向旋转,xi;yaw
4.四转子倾斜控制
飞行器很难通过没有特定的控制增强/或稳定装置的系统去控制。通过模拟验证,其中无人机的动态特性表现的十分不稳定。通过测试,进行简单的操作无人机就表现得极其不稳定。所有的这些动态特性的后果都是有由于发动机的扭矩产生;对于倾斜的转子所产生的推力和力矩可以是不平衡的,用于减少转子倾斜而产生的多余的升力。
由于要获得转子倾斜等引起的升力,至少在模拟一台可以在三维空间中移动的机器,必须插入一些控制律的数学模型。在所有的控制通道中引入PID控制器,使得无人机自稳并且提高其可控性。
PID控制器驱动发动机油门,以维持恒定的发动机转速。
其他两个PID控制器控制飞行器螺旋桨的螺距转子和右转子(
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[485395],资料为PDF文档或Word文档,PDF文档可免费转换为Word

