
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
三种锻造机械手主要运动机构的性能比较
摘 要
利用基本的模块机构组合方法,开发了一种新型的锻造机械手主要运动机构。这种主要运动机构由一个4/1模块机构和两个6 / 1–1模块机构组成,可以实现锻造机械手所需的抓具的提升,水平平移和俯仰。在算法模块的基础上,建立了所提出的新型主运动机构,Dango& Dienenthal主运动机构以及Schloemann-Siemag AG Meer主运动机构的正向和反向运动学的算法流程图。基于这些流程图,获得了三种主要运动机构在提升,水平平移和俯仰过程中的抓取器轨迹。然后,获取三个主要运动机构的最大提升偏差。此外,根据抗倾倒稳定性函数,分别获得了三种主要运动机构的抗倾倒稳定性。此外,当给出驾驶员的极限轴承值时,通过比例系数法可以获得三个主要运动机构的轴承能力的变化趋势。我们的研究为新型主要运动机制的开发和设计提供了重要的理论基础。
关键词:锻压机械手,主要运动机构,最大举升偏差,抗倾覆稳定性,有效载荷能力
- 介绍
锻造机械手是现代锻压系统必不可少的重型设备,与锻压机配合使用可完成大型锻件的自由锻造过程[1–4].早期,锻造机械手使用电机作为唯一的驱动装置,而托梁手推车则用作辅助装置来完成任务。不幸的是,它们的承载能力不足[5–6].随着液压技术的发展,液压履带锻造机械手已经在一些国家出现。具有水平和平移锻造功能的锻造机械手可以有效减少机械手在锻造过程中的瞬时冲击,从而大大提高了锻造机械手的有效载荷能力和弹性[7–8].为了实现锻造自动化,越来越多的锻造车间开始使用锻造机械手和锻压机来完成锻造过程,这可以有效地降低工作强度,提高生产效率,并提高产品质量。
B
A
9
H 10
G
a2 d
6
F
11
C
s3
4/1
a1
6/1-1
5
E
s2
I
2
4
s1
8
7
J
3
b
4/1
a1 b
L
D
1
K
O
(a)机械设备
(b)运动学草图
(c)组合图
a2
a1
b
b
a2
a1
a2
a1
b
a2
a1
b
(d)4/1模块机制及其等效机制
(e)模块机制及其等效机制
c
a2
a1
d
b
d
b
c
a2
a3
a1
a3
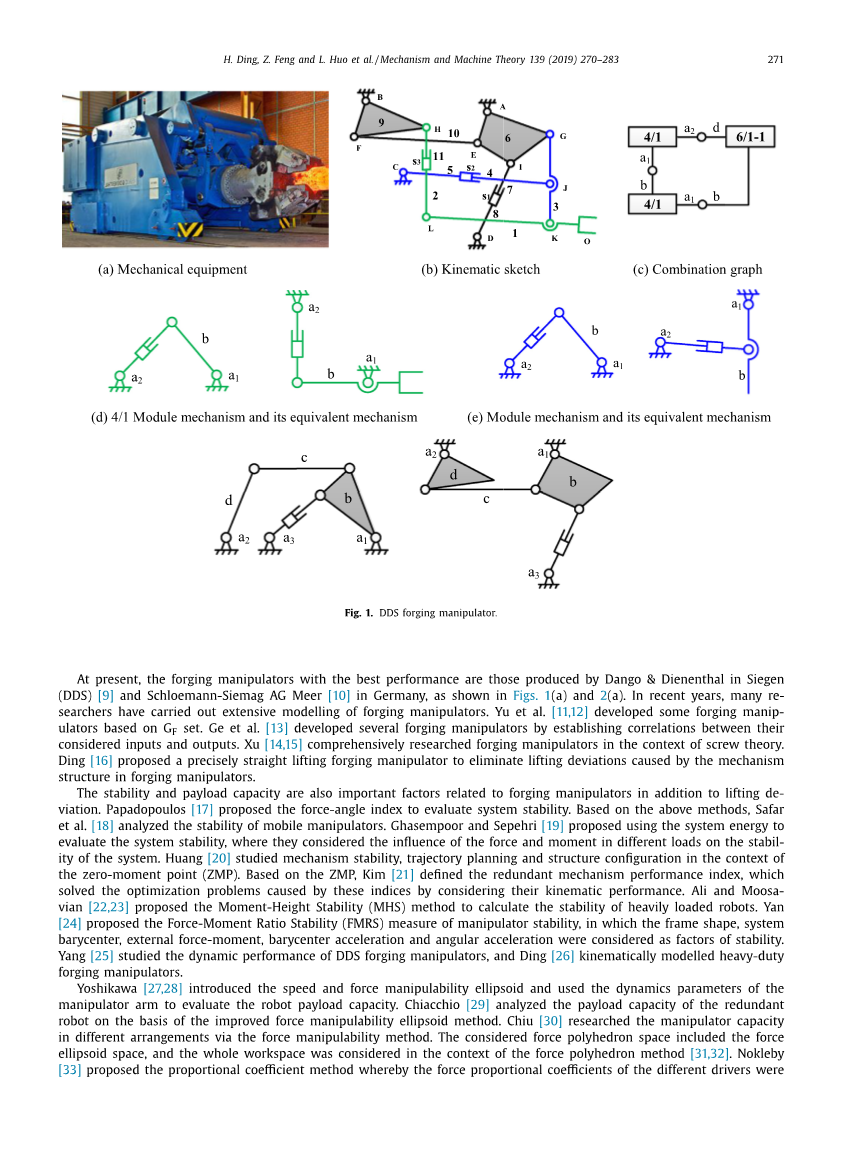
图1. DDS锻造机械手
目前,性能最好的锻压机械手是西根市丹高公司生产的锻压机械手(DDS)[9]和Schloemann Siemag AG Meer[10]在德国,如图所示1(a)和2(a)近年来,许多研究者对锻造机械手进行了广泛的建模研究。Yu等人[11,12]开发了一些基于GF集的锻造操纵器。Ge等人[13] 通过建立所考虑的输入和输出之间的相关性,开发了多个锻造机械手。徐[14,15]从螺旋理论的角度对锻造机械手进行了全面的研究。丁[16]提出了一种精确的直吊锻造机械手,以消除该机械手引起的起重偏差。
锻造机械手的稳定性和有效载荷能力也是影响其起重性能的重要因素。帕帕多普洛斯[17]提出了力角指标来评估系统的稳定性。基于上述方法,Safar等人[18]分析了移动机械手的稳定性。加森博尔和塞佩里[19] 他们提出了使用系统能量来评估系统稳定性的方法,其中他们考虑了不同负载下的力和力矩对系统稳定性的影响。黄[20]研究了零力矩点(ZMP)范围内的机构稳定性,轨迹规划和结构配置。基于ZMP,Kim[21] 定义了冗余机构性能指标,通过考虑它们的运动学性能解决了这些指标引起的优化问题。阿里和穆萨维亚[22,23] 提出了力矩高度稳定性(MHS)方法来计算重载机器人的稳定性。严[24]提出了机械臂稳定性的力矩比稳定性(FMRS)度量,其中将框架形状,系统重心,外力矩,重心加速度和角加速度视为稳定性的因素。杨[25] 研究了DDS锻造机械手的动态性能,丁[26] 运动学模型的重型锻造机械手。
吉川[27,28]介绍了速度和力的可操纵性椭球,并使用了操纵臂的动力学参数来评估机器人的有效载荷能力。奇亚基奥[29] 在改进的力可操纵性椭圆法的基础上,对冗余机器人的有效载荷能力进行了分析。Chiu[30] 通过力可操纵性方法研究了不同布置下的机械手能力。所考虑的力多面体空间包括力椭球空间,并且在力多面体方法的背景下考虑了整个工作空间[31,32].诺克比[33] 提出了比例系数方法,其中不同驾驶员的力比例系数为当给出单元
9 6
H G
B
F
A
I
10
7
4/1
b a1
6/1-1
s3
2
s1
5 s2 4
C
11
J
8
3
b a2
E
D
4/1
L
1
K O
(a)机械设备
(b)运动学草图
(c)组合图
a1
b
a1
b
b
b
a2
a1
a2
a1
a2 a2
(d)4/1模块机制及其等效机制
(e)4/1模块机制及其等效机制
c
a2
a1
d
b
a3
d
a2
a3
a1
c
b
图2. Meer锻造机械
外力扳手时,可通过平面机构雅可比矩阵求得。然后,有效负载容量表示为驱动程序的最大有效负载容量与上面获得的比例系数之比。
整个论文安排如下。在第二节通过模块机构组合的方法,开发了一种新型的锻造机械手主运动机构。提出了算法模块和算法流程图。同时,给出了与流程图中的特征有关的计算功能,并提供了三种主要运动机制的单独流程图。在第三节根据上述流程图和计算功能,获得三种机构在提升,水平平移和俯仰过程中使用的抓具的运动轨迹。然后,分析并比较了三种机构的最大提升偏差。在第4节提出了一种新型的抗倾覆稳定性函数,并对三种机理的稳定性进行了分析和比较。在第5节,当给出驱动器的极限轴承值时,可通过现有的比例系数方法针对不同的俯仰角获得三种机构的承载能力。
- 三种主要运动机制的运动学
2.1三种机制的配置
当前,在操纵器中使用最广泛的主要运动机制是DDS主要运动机制和Meer主要运动机制,分别如图所示1(b)和2(b).本文通过模块组合的方法,开发了一种新颖的主动机构[34]。其运动学示意图和组合图分别显示在图3(b)和(c),由一个4/1机制和两个6 / 1-1组合机制组成。DDS主运动和Meer主运动机制由两个4/1机制和一个6 / 1–1组合机制组成,分别如图所示1(c)和2(c).6 / 1–1表示第一个6链接1-DOF基本机制,而1/4表示4链接1-DOF基本机制表格1 第34参考文献中的内容。这三个主要运动机构都具有三个自由度,即在平面中两个正交平移和一个围绕垂直于该平面的轴的旋转。这三种机制均可实现机械手所需的提升,水平平移和俯仰。
N
11
B
F
s3 10
13
E
A
12
P
6
a1
a2
M
d
6/1-1
d
9
H
C
I
G
5
s2 7
4
2
s1
8
J
4/1
b a2
6/1-1 剩余内容已隐藏,支付完成后下载完整资料
资料编号:[423502],资料为PDF文档或Word文档,PDF文档可免费转换为Word

