
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
外文翻译
机器人机械手
工业机器人机械手是在生产环境中用以提高生产效率的工具,它能做常规乏味的装配线工作,或能做那些对于工人来说是危险的工作,例如:第一代工业机器人机械手是用来在核电站中更换核燃料棒,如果人去做这项工作,将会遭受有害射线的辐射。工业机器人机械手亦能工作在装配线上将小元件装配到一起,如将电子元件安放在电路印刷板,这样,工人就能从这项乏味的常规工作中解放出来。机器人机械手也能按程序要求用来拆除炸弹,辅助残疾人,在社会的很多应用场合下履行职能。
机器人机械手可以认为是将手臂末端的工具、传感器和手爪移动到程序指定位置的一种机器。当机器人机械手到达位置后,它将执行某种任务。这些任务可以是焊接、密封、机器装料、拆装以及装配工作。除了编程以及系统的开停之外,一般来说这些工作可以在无人干预下完成。
如下叙述的是机器人机械手系统基本术语:
1.机器人机械手是一个可编程、多功能的机械手,通过给要完成的不同任务编制各种动作,它可以运动零件、材料、工具以及特殊装置。这个基本定义引导出后续段落的其他定义,从而描绘出一个完整的机器人机械手系统。
2.预编程位置点是机器人机械手为完成工作而必须跟踪的轨迹。在某些位置点上机器人机械手将停下来做某些操作,如装配零件、喷涂油漆或者焊接。这些预编程点贮存在机器人机械手的贮存器中,并为后续的连续操作所调用,而且这些预编程点像其他程序数据一样,可在日后随工作需要而变化。因且,正是这种可编程的特征,一个工业机器人机械手很像一台计算机,数据可以在这里储存、后续调用与编辑。
3.机械手是机器人机械手的手臂,它使机器人机械手能弯屈、延伸和旋转,提供这些运动的是机械手的轴,亦是所谓的机械手的自由度。一个机械人能有3-16轴,自由度一词总是与机器人机械手轴数相关。
4.工具和手爪不是机器人机械手自身组成部分,但它们是安装在机器人机械手手臂末端的附件。这些连在机器人机械手手臂末端的附件可使机器人机械手抬起工件、点焊、刷漆、电焊弧、钻孔、打毛刺以及根据机器人机械手的要求去做各种各样的工作。
5.机器人机械手系统还可以控制机器人机械手的工作单元,工作单元是机器人机械手执行任务所处的整体环境,该单元包括控制器、机械手、工作平台、安全保护装置或者传输装置。所有这些为保证机器人机械手完成自己任务而必需的装置都包括在这一工作单元中。另外,来自外设的信号与机器人机械手何时装配工作、取工件或放工件到传输装置上。
机器人机械手系统有三个基本不见:机械手、控制器和动力源。
A.机械手
机械手做机器人机械手系统中粗重工作,它包括两个部分:机构和附件,机械手也有联接附件基座,如下图所示一机器人机械手基座与附件之间的联接情况。
机械手基座通常固定在工作区域的地基上,有时基座也可以移动,在这种情况下基座安装在导轨或者轨道上,允许机械手从一个位置移动到另外一个位置。
正如前面所提到的那样,附件从机器人机械手基座上延伸出来,附件就是
机器人机械手的手臂,它可以是直线型,也可以是轴节型手臂,轴节型手臂也是大家所知的关节型手臂。
机械臂使机械手产生各轴的运动。这些轴连在一个安装基座上,然后再练到托架上,托架确保机械手停留在某一位置。
在手臂的末端上,连接着手腕,手腕由辅助轴和手腕凸缘组成,手腕是让机器人机械手用户在手腕凸缘上安装不同工具来做不同种工作。
机器手的轴使机械手在某一区域内执行任务,我们将这个区域为机器人机械手的工作单元,该区域的大小与机械手的尺寸相对应,一个典型装配机器人机械手的工作单元。随着机器人机械手机械结构尺寸的增加,工作单元的范围也必须相应增加。
机械手的运动由执行元件或驱动系统来控制。执行元件或驱动系统允许各轴在工作单元内运动。驱动系统可用电气液压和气压动力,驱动系统所产生的动力经机构转变为机械能,驱动系统与机械传动链相匹配。由链、齿轮和滚珠丝杠组成的机械传动链驱动着机器人机械手的各轴。
B.控制器
机器人机械手控制器是工作单元的核心。控制器储存着预编程序供后续条用、控制外设,及与厂内计算机进行通讯以满足产品经常更新的需要。
控制器用于控制机械手运动和在工作单元内控制机器人机械手外设。用户可通过手持的示教盒将机械手运动的程序编入控制器。这些信息储存在控制器的存储器中以备后续调用,控制器存储了机器人机械手系统的所有编程数据,它能存储几个不同的程序,并且所有这些程序均能编辑。
控制器要求能够在工作单元内与外设进行通信。例如控制器有一个输入端,它能标识某个机加工操作何时完成。当该加工循环完成后,输入端接通,告诉控制器定位机械手以便能抓取以加工工件,随后机械手抓取一未加工工件,将其放置在机床上。接着,控制器给机床开始加工的信号。
控制器可以由根据时间顺序而步进的机械式轮毂组成,这种类型的控制器可用在非常简单的机械系统中。用于大多数机器人机械手系统中的控制器代表现代电子学的水平,是更复杂的装置,即它们是由微处理器操纵的。这些微处理器可以是8位,16位或32位处理器。它们可以使得控制器在操作工程中显得非常柔性。
控制器能通过通信线发送电信号,使它能与机器手各轴交流信息,在机器人机械手的机械手和控制器之间的双向交流信息可以保持系统操作和位置经常更新,控制器亦能控制安装在机器人机械手手腕上的任何工具。
控制器也有与厂内各计算机进行通信的任务,这种通信联系使机器人机械手成为计算机辅助制造(CAM)系统的一个组成部分。
存储器。基于微处理器的系统运行时要与固态的存储装置相连,这些存储装置可以是磁泡,随机存储器、软盘、磁带等。每种记忆存储装置均能贮存、编辑信息以备后续调用和编辑。
C.动力源
动力源是给机器人机械手和机器手提供动力的单元。传给机器人机械手系统的动力源有两种,一种是用于控制器的交流电,另一种是用于驱动机械手各轴的动力源,例如,如果机器人机械手的机械手是由液压和气压驱动的,控制信号便传送到这些装置中,驱动机器人机械手运动。
对于每一个机器人机械手系统,动力是用来操纵机械手的。这些动力可来源于液压动力源、气压动力源或电源,这些能源是机器人机械手工作单元整体的一部分。
运动学分析和优化设计3-PPR平面平行机械手
摘要:本文提出了一种3-PPR平面并联机械手,其中包括三个活性柱状节理、三个被动的柱状节理、三个被动转动关节。分析了运动学和优化设计的机械手,对其进行了讨论,提出机械手具有直接运动学的封闭式和无空隙随着边界的凸式空间。分析机械手的运动学和逆运动学,和逆雅可比矩阵推导机械手。改变旋转限制和机械手的工作空间研究,对机械手的工作空间进行了仿真。此外,为优化设计的机械手,机械手的性能指标进行了研究,然后优化设计方法是使用最小最大理论。最后,用一个例子进行了优化设计。
关键词:平面并联机械手,运动学,雅可比矩阵,优化设计,最大最小
1 引言
并联机器人组成的闭环有许多优势,比串联机器人有更高的精度和刚度。众所周知,并行比串联机器人有更高的有效载荷重量比、更高的精度和较高的结构刚度。最近一些机床已开发利用这些优点,机械手的精细运动的全钢载重子午线也采用并行机制,从平价等位基因机制制造单片机。并联机器人中,平面并联机器人是平面机械手运动。平面并联机器人有两个自由度(DOF)的运动;这是两个自由度的运动和一个旋转的运动。这众所周知,平面三自由度并联机器人的存在,RRP,RPR,RPP,PRR,PRP,和PPR,取决于棱柱形接头和旋转的组合接头,不包括PPP的组合,其中棱柱和旋转接头由P和R。解决方案的直接运动学系统架构的平面并联机器人进行了已经提出了,但更多的控制—克里特岛的解决方案和运动学分析架构要求。大多数的3-DOF平面并联机器人有手有缺点复杂的直接运动学多项式类型和无用的空隙小工作区以及凹型边界。直接运动学多项式的增加,求解方程以及选择合适的溶液变成一个巨大的负担。此外,凹型边界诱导非直从邻居的运动边界其他人。因此,一个并行的是很重要的机械手具有封闭式直接运动学和一个凸型空隙泰伊工作区边缘。在本文中,一种3-PPR平面平行机器人,其中P是一个活跃的棱柱关节,提出了克服上述的缺点,即该机器人有一个封闭式直接运动学和无空隙随着边界的凸式空间。该机械手的运动学分析,首先直接运动学,逆运动学,该机器人逆雅可比矩阵派生的。第二,旋转限制和工作区进行调查。同时为优化设计该机械手的操作,性能指标机器人进行了研究并优化设计方法是使用最小最大值进行理论。最后,一个例子使用最佳的的设计方法。
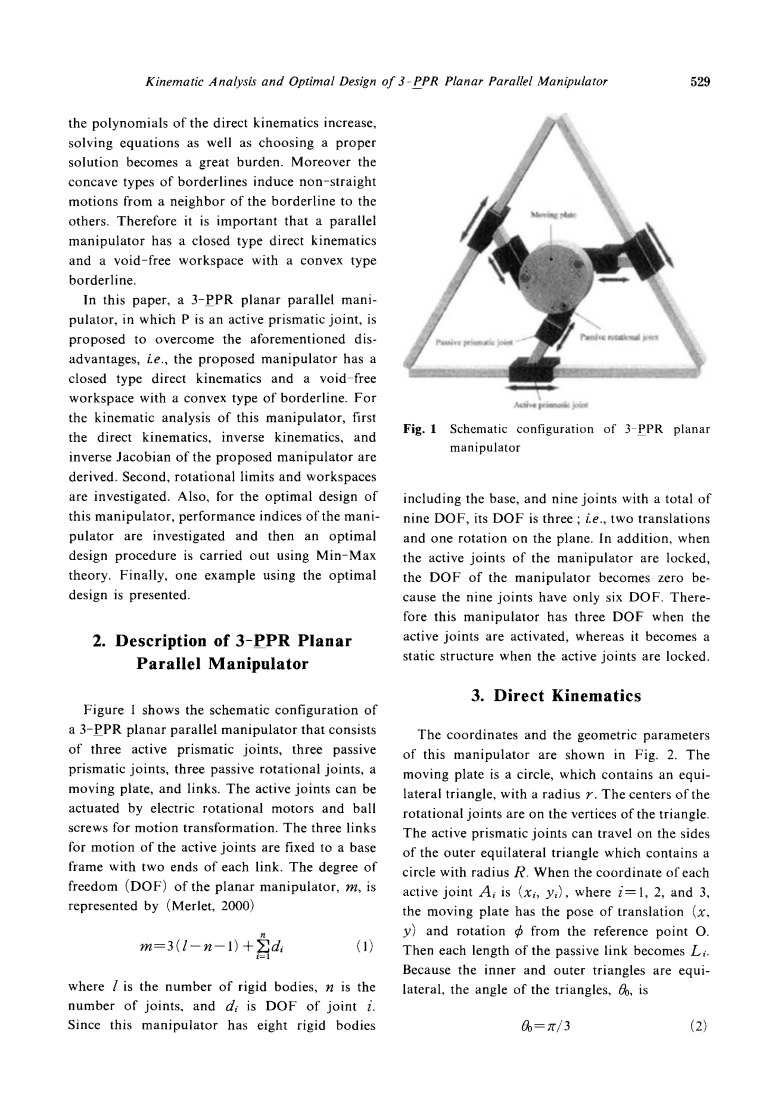
2 对3-PPR平面描述并联机器人
一种3-PPR平面并联机械手的组成三个活动的柱状节理,三个被动柱状节理,三个被动转动关节,一个移动板和链接。主动关节可以电动旋转电机和滚珠式运动变换螺钉。三个环节为主动关节运动是固定的基地与每个链路两端架。这个程度自由(自由度)的平面机械手m,是由
其中L为刚性体的数目,n是接头的数目,和DL是自由度关节I。
3 直接运动学
坐标和几何参数本机械手。移动板是一个圆圈,它包含一个设备—外侧三角,一个半径为R的中心旋转接头在三角形的顶点。有源棱柱形接头两侧的旅行在外的等边三角形,其中包含一个当坐标与半径为R的每圈主动关节的AI(Xi,Yi),其中i=1,2和3,移动板(X,Y)和旋转从参考点。
然后每个长度的被动链接,由于内部和外部的三角形等侧的三角形,角:
因为这个机器人有八个刚体内部的三角形,边长E:
内部三角形:
源关节的相对位移:
4 逆运动学和逆雅可比矩阵
图3显示了DES的坐标系统—主要研究一种3-PPR平面运动学逆解并联机器人。当中心的移动板从原点O的动作翻译(x,y)和旋转,顶点B表示为:
i= 1,2,3。有源棱柱的起源是由联合r从成因分提供的用户界面,VI是单位向量轴,E是主动轴移动关节,B是顶点的坐标:
对方程的逆雅可比矩阵的元素不具有相同的尺寸,相应的最后一列旋转具有长度。由第三列的无量纲,一个均质—水逆雅可比矩阵与无量纲元素主要是通过
5 旋转的限制和工作区
动片的转动受到限制通过链接之间的干扰旋转关节。图4显示了配置这种机械手的旋转限制顺时针和逆时针的案例(a)和案例(b)。假设该链接的宽度是可以忽略的:
它的结论是移动板3—PPR平面并联机器人是有界的通过从最初的旋转。
6 局部性能指标的使用逆雅可比矩阵
逆雅可比矩阵提供了对PAR的运动学结构瓦的质量—等位基因操纵。在本文中可操作性电阻率,并通过逆雅科各向同性—边被认为是该性能指标并联机器人。
可操作性,这是从一个距离奇异,评估的母牛—产品质量如关节速度的机械手。那是,更远的机械手的结构是从奇异性更快的机械手移动。小的可操作性,表明有一个奇点附近的摩尼的配置—机器人。因此,最好是有最大质量,并联机器人的可操作度,是指由
在非冗余的情况下,可操作性的Wm降低到
相逆的行列式雅可比矩阵
7 结论
一种3-PPR平面并联机器人已提出的,和运动学分析和机械手的优化设计进行了探讨。直接运动学,逆像数学和玛
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[422721],资料为PDF文档或Word文档,PDF文档可免费转换为Word

